和Laurens一起学乐高EV3 |
您所在的位置:网站首页 › 乐高EV3小车的转弯方式不包括 › 和Laurens一起学乐高EV3 |
和Laurens一起学乐高EV3
|
好久没有更新知乎了,今天写一篇长文,梳理一下之前看过的Laurens的经典乐高基础课程。 希望对开始使用乐高EV3的朋友有帮助。 The LEGO® MINDSTORMS® EV3 Discovery Book: a beginner’s guide to building and programming robots 看书名,各位就知道这是一本初级本的书籍,但是这本书讲到的一些基本技巧和编程方法,非常值得推荐,也是我收藏的25本Lego 教材中,推荐最值得一读的一本。 全书六个部分,包括开始、传感器编程、机器人搭建技巧、车辆和动物机器人、高级编程、机器和仿人机器人。我们一一来了解一下: 第一章 开箱,了解EV3的所有组件  开箱后,第一件事情是分类,便于以后拼搭。 之后,这张图也很有用,所有配件一览无余。 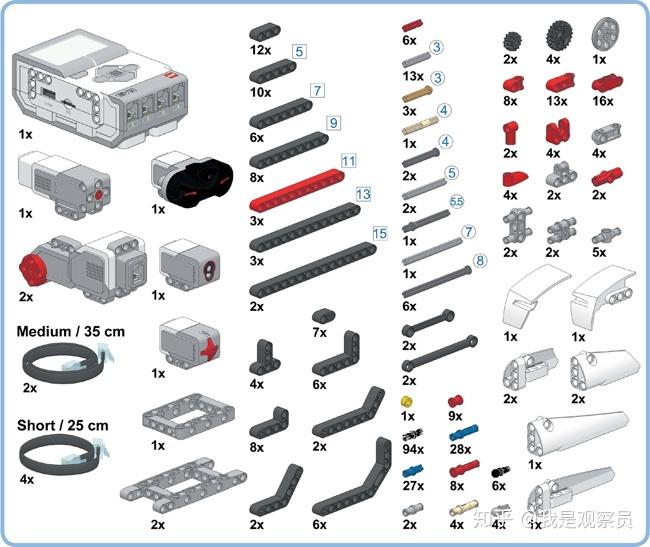 对于拼搭时,如何快速找配件也很重要,我有时候就分不清几孔的beam。 有了这张图,效率一定会大大提升。 以上都是硬件准备了,EV3- 的名字其实是指产品Mindstorm 的第三代, 即 Evolution 3rd Generation的意思。那么相应的软件也是 Mindstorm,在乐高网站下载即可。 Mindstorm 软件已经包括了5个完整的机器人项目,从搭建手册到代码都有。但是一些基本技巧可能需要类似Laurence 这样的大神仔细解释后,才会精通。  这是EV3机器人的工作模式- 编程软件、可编程“砖”,搭建好的机器人、远程操控(可选手机App 或EV3自带的遥控器) 第二章 搭建第一个机器人 整本书的大部分项目都以 探险者小车来展开,如图  第一个知识点:  不同颜色的Pin针,表明他们在插入孔后能不能自由转动,比如红、蓝、黑是不能灵活转动,摩擦力大(可以转),而灰色和土黄色则是自由转动的(无摩擦力)。 接下来,搭建机器人,直接上图。按照以下图例,就可以搭建出探索者了,       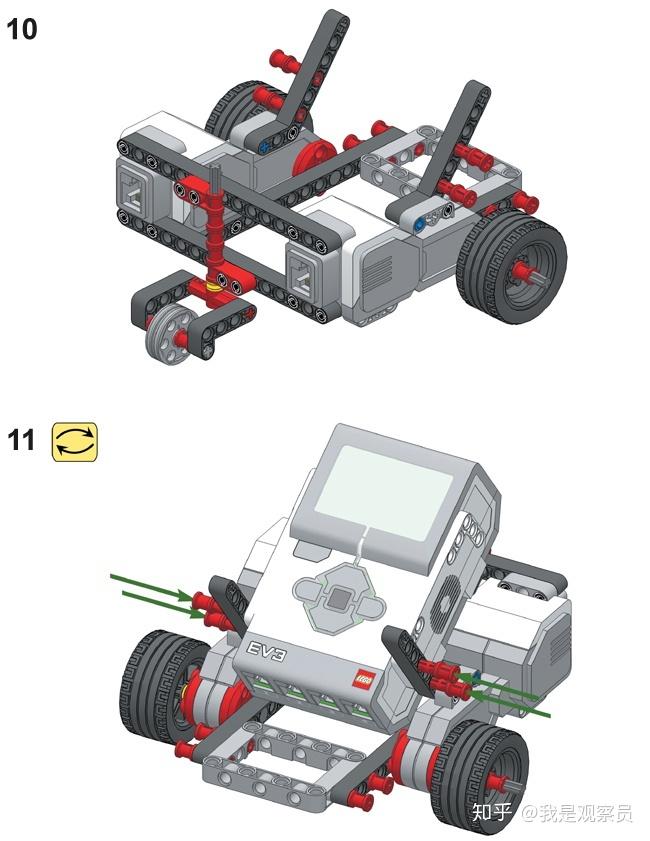   整个过程应该比较容易搭建。 第二个知识点: 接口Port A,B,C, D 都是输出端口,连接马达motors(大马达/中型马达),负责数据输出。 接口1,2,3,4都是输入端口,连接传感器,负责数据输入。第三个知识点: EV3编程“砖”除了ABCD和1234端口连接数据线外,还有3个接口; PC- 连接到电脑,数据互传。USB 可以连接外部设备,例如Wifi-Dongle 这个设备没用过,不知道能做什么?SD 可插入SD卡,扩充编程块的存储空间;数据线分为三种长度:短25厘米;中35厘米;长50厘米; 编程“砖”的界面比较简单,上下左右,返回;但是屏幕内容菜单略微复杂,尤其是在设置乐高魔方这个项目的时候,我花了好几次,使用这个界面,才调整好。难点有端口设置和变换等。多用就熟悉了。 第三章 编程 EV3的编程界面非常简洁。编程面板内不同的程序块用不同颜色显示, 绿色:行动模块- 包括马达,声音 橘黄色:流程模块 - 黄色: 红色: 蓝色: 蓝绿色:自定义程序块 模块之间可以通过拖放,显示连接的线条,连接不同的模块。 整个界面不再多做介绍,熟悉就可以了。 知识点:EV3软件自带5个机器人,另外还有12个额外的机器人项目。 第四章 编程- 行为模块 移动转向模块 - 控制机器人马达。可以实现前进后退,左转右转。 马达控制的5种模式 On, Off, On for rotation, On for seconds, On for degrees B+C 端口为马达默认的连接端口。 转向 动力:负值向后退,正值前进,值越大,越快。 2019年8月7日继续更新 Laurens的前1-3章是探索者小车的搭建,并介绍了EV3桌面程序的界面和基本使用。EV3和Wedo 系列一样,不再是拼搭机器人,而是拼+编(代码)的过程,从第四章开始,我们将跟随Laurens的发现之旅,通过123个小发现,32个设计发现,和6个机器人一起成为EV3大师吧! 程序界面的基本概念: 同颜色的编程块表明完成同类型的任务;绿色表示动作模块每个模块都有模式(按马达运行圈数设置还是时间)+设置选项(方向,马达动力大小,马达圈数/时间,执行后是否停止等); 请问,以上两个动作程序块分别表示什么意思呢? 答案:第一个用马力为50,向后直行2圈;第二个马力为75右转弯持续3秒; 注意Mode即马达的使用模式有5种:关闭,运行;按时间运行数秒;按角度运行;按转圈数运行。这几种的使用场景和差异,我们稍后再详细介绍。 以上设置是针对2个马达即连接B口和C口的,同时起作用。 这里旋转360度=马达旋转1圈。 发现1: 如何实现加速 实验过程:首先在工作区拖放10个行动模块,第1-10的马达速度设置从10 到100,每个模块的其他设置都一样。 发现2: 如何精确转向 实验过程:如果机器人轮子精确转向90度,那么编程模块里的角度这个值设置为多少? 开始设置为275,如果不够可以尝试280,285等等,直到满足条件位置。如果你确定了90度的值,那么再尝试设置180度转弯的值。 发现3: 移动机器人 实验过程:三个程序块分别完成1. 直行3秒马力50,转向180度,然后回到起始位置。 实验4:机器人走出字母路径 如果是B?需要多少个程序块? 接下来我们探索声音,示例  实验5:让机器人边走边说 设置机器人,假如向前走,就发出“Forward”声音,向后,“Backward"; 你如何设置声音模块的播放类别? 实验6:自己成为DJ 你可以通过EV3可编程“砖”,播放你喜欢的音乐,或者独创音乐? 显示模块的4种模式:图片、图形、文字、重新设置 实验7: |
【本文地址】