车载测试常见概念介绍 |
您所在的位置:网站首页 › 中控系统设备 › 车载测试常见概念介绍 |
车载测试常见概念介绍
|
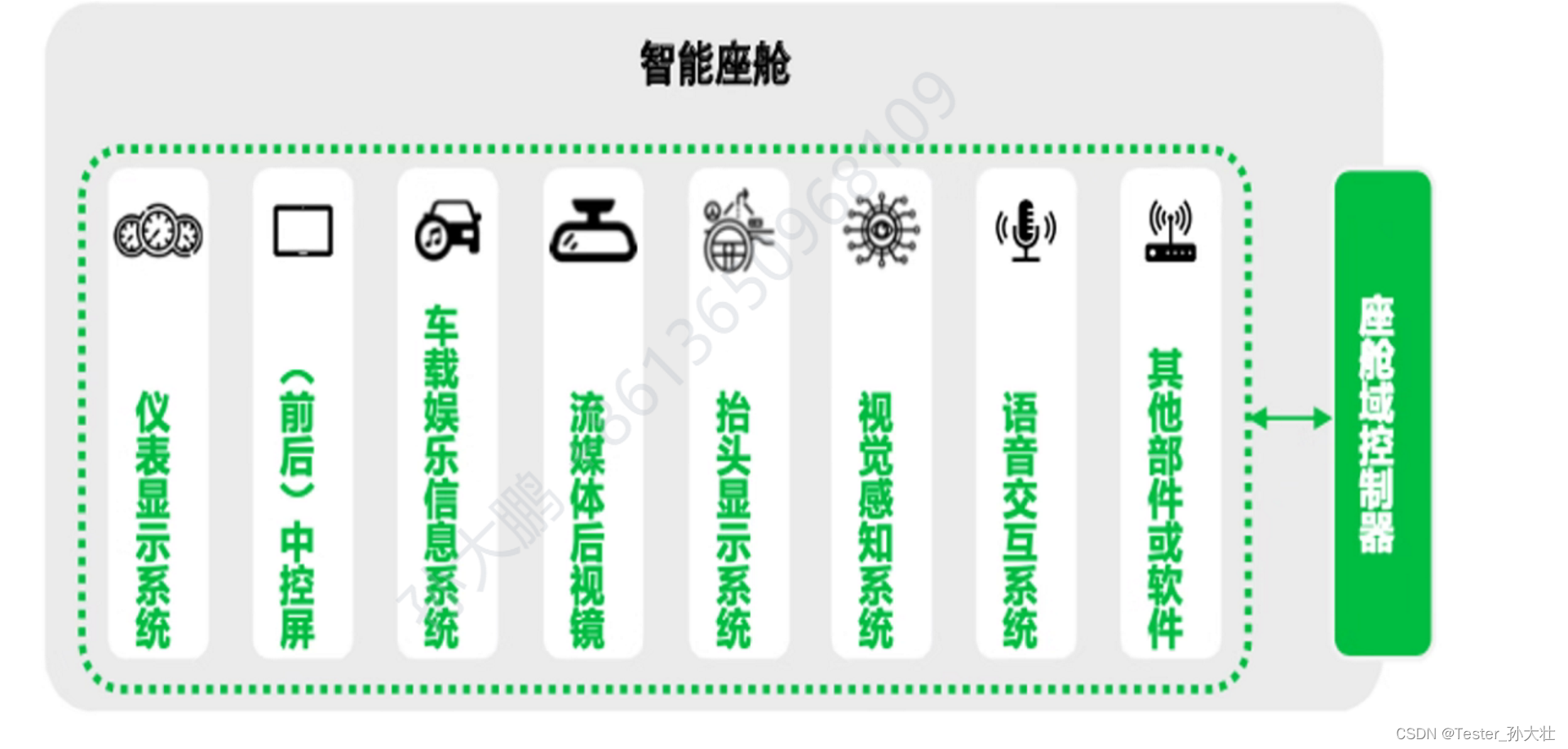
座舱台架介绍
车载测试中的座舱台架测试包括以下几个方面: 仪表盘:测试仪表盘的显示、功能、光线反射和防眩目性能等。评估仪表盘是否能够提供准确的驾驶信息,并能在各种光照条件下清晰可见。中控屏:测试中控屏的触摸响应、图像显示质量、系统稳定性和功能性能等。评估中控屏是否能够顺畅地操作,并提供高质量的图像显示,满足驾驶员和乘客的需求。车载娱乐信息系统:测试车载娱乐信息系统的音频效果、视频播放质量、系统兼容性和网络连接性能等。评估车载娱乐系统是否能够提供良好的音视频体验,并能够无缝与其他设备进行连接。流媒体后视镜:测试流媒体后视镜的图像质量、延迟性能和系统稳定性等。评估流媒体后视镜是否能够提供清晰的后方视野,并能够及时反映车辆周围的情况。抬头显示系统:测试抬头显示系统的投影效果、视觉清晰度和信息准确性等。评估抬头显示系统是否能够以安全、便捷的方式向驾驶员提供必要的驾驶信息,减少驾驶员的视线离开道路。视觉感知系统:测试视觉感知系统的识别准确性、实时性和鲁棒性等。评估视觉感知系统是否能够准确地识别道路、交通信号和障碍物等,并能够及时做出响应。语音交互系统:测试语音交互系统的识别准确度、响应速度和语音合成质量等。评估语音交互系统是否能够准确地理解驾驶员的指令,并能够以清晰自然的语音进行回应。
硬件层:该层包括座舱中的各种硬件设备,如显示器、触摸屏、传感器、处理器、通信设备、操纵杆等。这些硬件设备通过接口与软件层进行交互,并提供给用户各种功能和信息。 软件层 系统软件层:该层包括座舱系统的操作系统和一些基础软件,用于支撑各种功能软件的运行。系统软件层主要负责座舱系统的资源管理、任务调度、设备驱动以及与座舱硬件的通信等功能。 功能软件层:该层包括各种座舱功能软件,如航空电子设备软件、航空通信软件、导航软件、监控软件等。这些功能软件提供各种操作功能,如飞行控制、导航导引、通信管理、仪表显示等,并结合座舱硬件设备,实现对航空器的控制和操作。 服务层:该层包括一些支持性的服务软件,如故障诊断软件、数据分析软件、安全监控软件等。这些服务软件主要用于对座舱系统进行监控、故障诊断和数据分析,保障系统的正常运行和安全性。 智能座舱的操作系统QNX: QNX是一种实时操作系统,已经被广泛应用于汽车领域。它采用微内核架构,具有高度的可靠性、安全性和系统稳定性。QNX操作系统具有封闭性,这意味着源代码和内部结构不对外开放。只有黑莓公司拥有完全控制权,并且为其提供技术支持。 Linux(开源AGL): Linux是一种开源操作系统,具有广泛的应用领域。对于智能座舱来说,Linux常常与开源汽车联盟(Automotive Grade Linux,AGL)一起使用。AGL是一个开源软件项目,致力于为汽车提供一个通用的操作系统平台。它基于Linux内核,并提供了许多与汽车相关的功能和应用。Linux(开源AGL)具有开放性,源代码对开发者和社区开放,可以方便地进行定制和修改。 Android: Android是一个流行的开源移动操作系统,由Google开发。虽然最初是为智能手机设计的,但也可以应用于智能座舱系统。Android操作系统具有开放性,允许开发者访问源代码并自由定制。然而,根据不同的情况,厂商可以选择是否封闭它,限制用户的访问和自定义能力。 HIL硬件在环
在HIL测试中,仿真模型是一个通过数学模型和物理等效电路描述系统行为的模型。它能够模拟真实系统的动态特性,并与硬件平台进行实时连接。 硬件平台是实际的嵌入式系统,包括传感器、执行器和其他系统组件。它与仿真模型进行连接,并通过接口与待测控制器进行实时通信。 待测控制器是需要进行测试的嵌入式控制器,它可以是一个电子控制单元(ECU)、自动驾驶系统、飞行控制系统等。 软件平台是用于管理和运行HIL测试的软件工具。它可以用于配置仿真模型和硬件平台的连接,监控测试过程,并提供可视化界面进行测试结果的分析和评估。 控制算法是待测控制器中用于实现特定功能的算法。在HIL测试中,控制算法通过与仿真模型和硬件平台进行交互,验证其在实际环境中的性能和稳定性。 HIL测试的流程可以简要概括为以下几个步骤: 配置仿真模型和硬件平台的连接:将仿真模型与硬件平台进行实时连接,并配置其接口参数。配置控制算法和待测控制器:将待测控制器与控制算法进行配置,并上传到硬件平台中。运行测试用例:使用软件平台加载测试用例,运行HIL测试,并监控测试过程中的实时数据和结果。分析和评估测试结果:通过软件平台提供的可视化界面,分析和评估测试结果,检测系统的性能和稳定性。优化和迭代测试:基于测试结果的分析,优化控制算法或待测控制器,并进行迭代测试,直到满足系统需求。总之,HIL测试通过连接仿真模型和实际硬件平台,将待测控制器与仿真环境进行交互,以验证系统的功能和性能,并提供一个可靠的测试环境来评估嵌入式系统的设计和性能。 OTA测试
技术架构: 在车载系统中进行OTA测试时,通常有以下几个重要组成部分: 车载设备(Vehicle-Embedded Device):指安装于车辆上的终端设备,例如车载娱乐系统、车载导航系统等。该设备负责接收OTA升级包并完成升级操作,同时支持与远程服务器的通信。 远程服务器(Remote Server):负责托管OTA升级包,并将升级包发送给车载设备。远程服务器还负责与车载设备进行通信,例如向车载设备发送操作指令、获取车载设备的工作状态等。 通信网络(Communication Network):连接车载设备和远程服务器的网络环境,可以是4G/5G网络、Wi-Fi网络等。 OTA升级平台(OTA Update Platform):为进行OTA测试提供技术支持的平台,包括OTA测试工具、OTA测试管理系统等。该平台能够模拟远程服务器的功能,向车载设备发送OTA升级包,并记录测试过程中产生的日志和报告。 测试过程: OTA测试通常包括如下几个步骤: 升级包准备:OTA测试的第一步是准备OTA升级包,包括升级文件和升级请求等。升级文件是待测试的软件版本,升级请求用于触发车载设备的升级操作。 升级包传输:OTA升级包通过通信网络传输到车载设备。可以通过远程服务器发送升级包,也可以通过OTA升级平台进行模拟测试。 升级操作:当车载设备接收到升级包后,会开始进行升级操作。该操作包括下载升级文件、校验升级文件完整性、备份旧版本、安装新版本等。 升级结果验证:升级完成后,需要对升级结果进行验证。验证过程可以包括版本号检查、功能测试、性能测试、稳定性测试等。 日志和报告分析:在测试过程中,记录和分析产生的日志和报告,以便评估OTA升级的效果和稳定性。 需要注意的是,OTA测试涉及到车辆系统的软件升级和远程控制,因此在进行OTA测试时需要确保安全性和稳定性,并且需要遵循相关法规和标准。 常见概念ADAS(Advanced Driver Assistance Systems)是指先进驾驶辅助系统,是指车辆上装备的一系列技术,旨在提高驾驶员的安全性和驾驶舒适度。下面是ADAS中常见的名称和其英文全称和含义: LDWS(Lane Departure Warning System):车道偏离警示系统,用于监测车辆是否偏离车道,并通过声音、视觉或震动等方式提醒驾驶员。 LKS(Lane Keep Assist System):车道保持辅助系统,通过自动操控方向盘或制动系统,帮助车辆保持在所选车道内。 ACC(Adaptive Cruise Control):自适应巡航控制系统,根据车速和前方车辆的距离调节车辆的巡航速度,保持与前方车辆的安全距离。 FCW(Forward Collision Warning):前方碰撞预警系统,通过车辆或道路上的传感器检测前方障碍物并预警驾驶员,以避免前方碰撞事故。 APA(Automatic Parking Assist):自动停车辅助系统,利用车辆上的传感器和控制系统,自动帮助驾驶员完成倒车或平行停车动作。 BSD(Blind Spot Detection):盲点检测系统,通过传感器监测车辆两侧盲区是否有其他车辆,并提供警示,帮助驾驶员避免盲点碰撞事故。 AEB(Autonomous Emergency Braking):自动紧急制动系统,通过车辆上的传感器检测前方障碍物,并在驾驶员未能及时制动时自动启动制动系统以避免碰撞。 DMS(Driver Monitoring System):驾驶员状态监测系统,通过车辆上的传感器监测驾驶员的注意力和疲劳程度,并提供警示以确保驾驶员安全。 CAN在汽车行业中指的是控制器局域网(Controller Area Network),它是一种汽车电子系统之间用于通信和传输数据的标准通信协议。 以下是所述名词的英文全称和含义: 动力CAN EMS:Engine Management System(发动机管理系统),用于监测和控制发动机的运行。EPS:Electric Power Steering(电动助力转向系统),用于提供转向力量和辅助驾驶员转向。ESP:Electronic Stability Program(电子稳定程序),用于提供车辆稳定性控制,通过检测车辆姿态和驾驶行为,以及自动调整制动力和汽车动力来提高车辆操控性和安全性。TCU:Transmission Control Unit(变速器控制单元),用于监测和控制汽车的变速器。ABS:Antilock Braking System(防抱死制动系统),用于避免车轮在制动时抱死,提供在制动时保持车辆稳定性的能力。ABM:Airbag Module(安全气囊单元),是安全气囊系统中的一个单元,用于监测车辆碰撞情况,以触发安全气囊的部署,保护乘客的安全。车身CAN IPC: Instrument Panel Cluster, 仪表盘显示系统。它是车辆仪表盘上的显示设备,用于显示车辆的速度、转速、油量、里程等信息。 ECU: Electronic Control Unit, 电子控制单元。它是车辆的电子控制模块,负责监控和控制车辆的各个系统,包括发动机管理、刹车系统、传输系统等。 BCM: Body Control Module, 车身控制模块。它是车辆电气系统的控制中心,负责控制车门锁定、车窗升降、车灯控制等车身电子设备。 TPMS: Tire Pressure Monitoring System, 轮胎压力监测系统。它是用于监测车辆轮胎胎压的系统,当轮胎气压过高或过低时会发出警报。 HVAC: Heating, Ventilation, and Air Conditioning, 暖通空调系统。它是车辆的空调系统,用于调节车内温度、通风和空气质量。 ECC: Electronic Climate Control, 电子空调控制系统。它是车辆空调系统的一种高级控制系统,可以根据车内温度和设定的温度自动控制空调系统。 HUD: Head-Up Display, 抬头显示系统。它是在驾驶员前方的挡风玻璃上投射车辆信息的显示系统,以便驾驶员无需低头就能看到重要的车辆信息。 影音CAN HU: Head Unit,即车载音视频系统,是指车辆中心控制台上的一块搭载操作系统、提供音乐播放、导航、通信等功能的多媒体设备。 AVM: Around View Monitor,即全景影像监控系统,是一种车载安全辅助系统,利用多个摄像头分别安装在车辆四个方向上,通过合成算法将四个摄像头的画面融合在一起,提供给驾驶员一个全景视角,帮助驾驶员更好地观察车辆周围环境。 T-BOX: Telematics Box,即远程车联盒子,是一种车载通信设备,通过连接车辆与互联网,实现远程监控、车辆定位、数据传输和与驾驶员手机App或云端平台的交互等功能,提供车辆远程控制和智能化服务。 DVR: Digital Video Recorder,即数字视频录像仪,是用于在行驶过程中录制车辆周围环境视频的设备。通过摄像头采集视频画面,并将视频数据存储到闪存或硬盘中,可用于事故记录、证据保全和驾驶行为监测等用途。 |
 HIL测试(Hardware-in-the-Loop Testing)是一种用于测试嵌入式系统的测试方法。它通过将仿真模型与实际硬件平台进行实时连接,将待测控制器与仿真环境进行交互,以验证系统的功能和性能。
HIL测试(Hardware-in-the-Loop Testing)是一种用于测试嵌入式系统的测试方法。它通过将仿真模型与实际硬件平台进行实时连接,将待测控制器与仿真环境进行交互,以验证系统的功能和性能。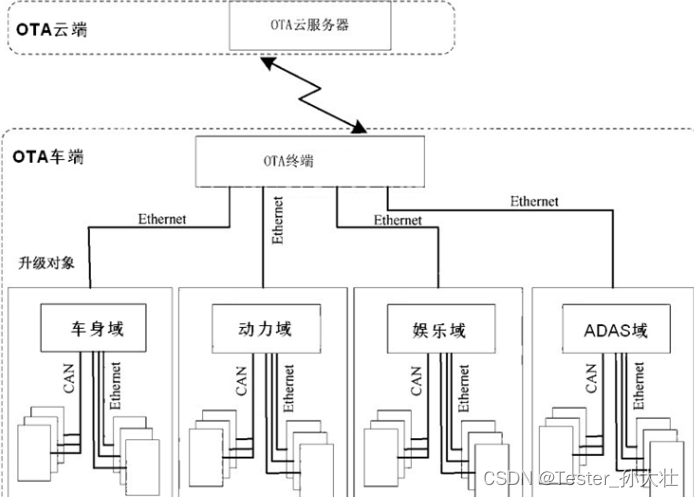 OTA测试(Over-The-Air testing)是车载测试中的一项重要测试,主要用于验证车载系统的软件升级和远程控制功能。下面就来详细介绍OTA测试的技术架构和测试过程。
OTA测试(Over-The-Air testing)是车载测试中的一项重要测试,主要用于验证车载系统的软件升级和远程控制功能。下面就来详细介绍OTA测试的技术架构和测试过程。【本文地址】
今日新闻 |
推荐新闻 |