Epson机器人远程控制指令测试 |
您所在的位置:网站首页 › 中国监理协会证书查询 › Epson机器人远程控制指令测试 |
Epson机器人远程控制指令测试
|
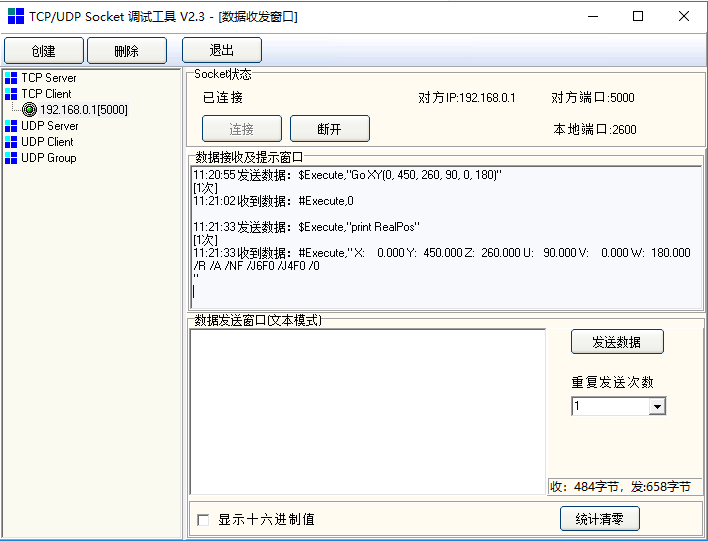
公司有一批机器,使用PLC控制机器人动作,通过网口进行通讯。 经测试,使用发送ascii码字符方式,可以正常与EPSON机械人进行通讯。 勇哥用网络助手做了一下实验,下文中所记录的远程指令是可以用的。
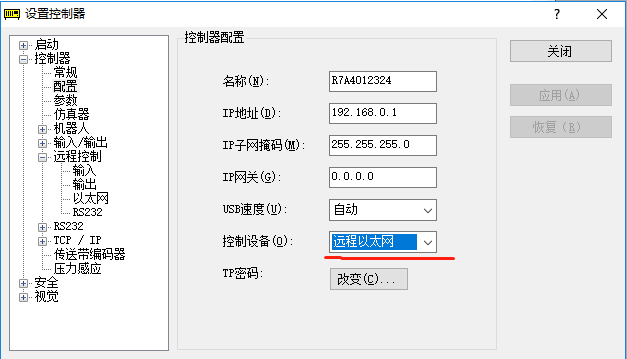
要注意的是,做这个实验前,把机器人的配置为“远程以太网”。
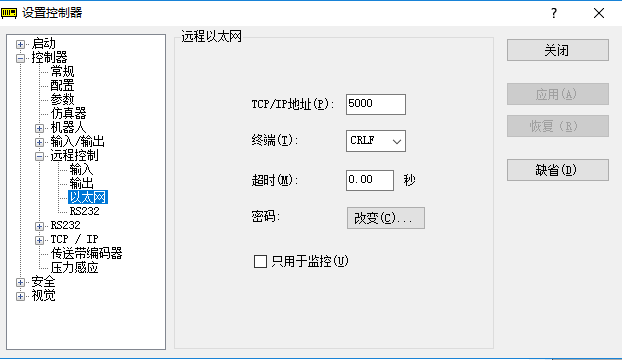
在远程控制的时候,机器人做为服务器,因此只有个端口号可以改变。 注意CRLF是尾结束符,这意味着你在网络助手里发送字符串指令的最后在加上一个回车,再发送。
10:37:16 发送数据:$Login,123 [1次] 10:37:16 收到数据:#Login,0 10:45:06 发送数据:$SetCurRobot,0 [1次] 10:45:06 收到数据:#SetCurRobot,0 10:52:00 发送数据:$Execute,"Reset" [1次] 10:52:00 收到数据:#Execute,0 10:52:51 发送数据:$SetMotorsOn,0 [1次] 10:52:51 收到数据:#SetMotorsOn,0 10:53:29 发送数据:$GetStatus [1次] 10:53:29 收到数据:#GetStatus,00100000001,0000 10:56:14 发送数据:$Execute,"Go XY(0, 450, 260, 90, 0, 180)" [1次] 10:56:14 收到数据:#Execute,0 11:01:32 发送数据:$Execute,"Go XY(0, 450, 260, 90, 0, 180)" [1次] 11:01:32 收到数据:#Execute,0 11:02:39 发送数据:$Execute,"move XY(0, 450, 260, 90, 0, 180)" [1次] 11:02:39 收到数据:#Execute,0 11:03:58 发送数据:$Execute,"move XY(0, 450, 260, 90, 0, 180)" [1次] 11:03:58 收到数据:#Execute,0 11:05:01 发送数据:$Execute,"Jump3 Here -TLZ(50), Pallet(1, 1) -TLZ(50), Pallet(1, 2)" [1次] 11:05:08 收到数据:#Execute,0 13:37:56 发送数据:$Login,123,$r$n[1次] 13:37:56 收到数据:#Login,0 18:37:13 发送数据:$Execute,"move Here + x(50)" [1次] 24 45 78 65 63 75 74 65 2C 22 6D 6F 76 65 20 48 65 72 65 20 2B 20 78 28 35 30 29 22 0D 0A 18:37:15 收到数据:#Execute,0 8:10:16 发送数据:$Execute,"move XY(cx(P0)+5, cy(p0), cz(p0), cu(p0), 0, 180)" [1次] 8:10:18 收到数据:#Execute,0 8:02:48 发送数据:$Execute,"move XY(cx(P0), 450, 260, 90, 0, 180)" [1次] 8:02:52 收到数据:#Execute,0 8:17:31 发送数据:$Execute,"print RealPos" [1次] 8:17:31 收到数据:#Execute," X: 200.001 Y: 450.000 Z: 260.000 U: 90.000 V: 0.000 W: 179.999 /R /A /NF /J6F0 /J4F0 /0 " 8:59:20 发送数据:$Execute,"Tool 0" [1次] 8:59:20 收到数据:#Execute,0 8:54:31 发送数据:$Execute,"print Pls(1)" [1次] 8:54:31 收到数据:#Execute," 5729 " 8:55:31 发送数据:$Execute,"print Pls(2)" [1次] 8:55:31 收到数据:#Execute," -40789 " 10:22:04 发送数据:$Execute,"P25=XY(0,0.1,0.2,0.3,0.4,0.5)/R/A" [1次] 10:22:04 收到数据:#Execute,0 14:17:54 发送数据:$Execute,"PLabel 25, "pick"" [1次] 14:17:54 收到数据:#Execute,0 14:32:13 发送数据:$Execute,"P25=XY( -41.937,356.920,345.823, -42.691,14.518, -166.718)/R/A" [1次] 14:32:13 收到数据:#Execute,0 14:33:11 发送数据:$Execute,"PLabel 25, "pick"" [1次] 14:33:11 收到数据:#Execute,0 14:32:13 发送数据:$Execute,"P25=XY( -41.937,356.920,345.823, -42.691,14.518, -166.718)/R/A" [1次] 14:32:13 收到数据:#Execute,0 14:33:11 发送数据:$Execute,"PLabel 25, "pick"" [1次] 14:33:11 收到数据:#Execute,0 13:50:54 发送数据:$Execute," plist 10" [1次] 13:50:54 收到数据:#Execute,"P10 = XY( 246.488, 259.917, -20.311, -0.440 ) /R /0 RotaryWait " 13:53:52 发送数据:$Execute," plist 10 ,20" [1次] 13:53:52 收到数据:#Execute,"P10 = XY( 246.488, 259.917, -20.311, -0.440 ) /R /0 RotaryWait P11 = XY( 253.359, 276.309, -88.435, -1.387 ) /R /0 RotaryGet P12 = XY( -275.063, 80.182, -21.663, 3.388 ) /R /0 ConveyerWait P13 = XY( -275.063, 80.182, -51.558, 3.388 ) /R /0 ConveyerGet P14 = XY( -277.911, 80.182, -87.741, 3.388 ) /R /0 ConveyerGet2 P15 = XY( -80.679, 303.231, -7.821, -176.860 ) /R /0 WastePutWait P16 = XY( -80.679, 303.231, -29.471, -176.860 ) /R /0 WastePut P17 = XY( 200.531, 279.717, -24.501, -19.951 ) /R /0 GrapImage P20 = XY( 242.832, 268.062, -87.521, -1.939 ) /R /0 xia " 9:30:46 发送数据:$Execute,"on 10 " [1次] 19:30:46 收到数据:#Execute,0 19:31:16 发送数据:$Execute,"off 10" [1次] 19:31:16 收到数据:#Execute,0 19:43:47 发送数据:$Execute,"print sw(9)" [1次] 19:43:47 收到数据:#Execute," 1 " 19:45:32 发送数据:$Execute,"print sw(9)" [1次] 19:45:32 收到数据:#Execute," 0 13:23:41 发送数据:$Execute,"Jump3 Here -TLZ(50), P0 -TLZ(50), P0" [1次] 13:23:48 收到数据:#Execute,0 13:57:48 发送数据:$Execute,"Go Here -TLZ(50)" [1次] 13:57:49 收到数据:#Execute,0 14:02:14 发送数据:$Execute,"pass p2" [1次] 14:02:16 收到数据:#Execute,0 14:25:40 发送数据:$Execute,"pass p0;go p4" [1次] 14:25:45 收到数据:#Execute,0 14:29:30 发送数据:$Execute,"pass p4;go p0" [1次] 14:29:34 收到数据:#Execute,0 14:31:32 发送数据:$Execute,"Jump3 Here -TLZ(5), P0 -TLZ(50), P0" [1次] 14:31:37 收到数据:#Execute,0 15:04:00 发送数据:$Execute,"pass p4; ON 10" [1次] 15:04:02 收到数据:#Execute,0 15:05:03 发送数据:$Execute,"pass p4; OFF 10" [1次] 15:05:03 收到数据:#Execute,0 9:54:14 发送数据:$Execute,"Hand P0, Lefty" [1次] 9:54:14 收到数据:#Execute,0 9:54:57 发送数据:$Execute,"Plist 0" [1次] 9:54:57 收到数据:#Execute,"P0 = XY( ****.***, ****.***, ****.***, ****.***, ****.***, ****.*** ) /L /AB* /NF* /J6F* /J4F* /0 " 9:55:50 发送数据:$Execute,"Plist 1" [1次] 9:55:50 收到数据:#Execute,"P1 = XY( 291.057, 308.640, -10.000, -80.000, 0.000, 0.000 ) /L /A /NF /J6F0 /J4F0 /0 GetWait " 9:56:48 发送数据:$Execute,"Hand P1, Righty" [1次] 9:56:48 收到数据:#Execute,0 9:57:07 发送数据:$Execute,"Plist 1" [1次] 9:57:07 收到数据:#Execute,"P1 = XY( 291.057, 308.640, -10.000, -80.000, 0.000, 0.000 ) /R /A /NF /J6F0 /J4F0 /0 GetWait " 9:51:41 发送数据:$Execute,"Go XY(100, 450, 260, 90, 0, 180)/R /A /NF /J6F0 /J4F0" [1次] 9:51:42 收到数据:#Execute,0 9:47:33 发送数据:$Execute,"print here" [1次] 9:47:33 收到数据:#Execute," X: 100.000 Y: 450.000 Z: 260.000 U: 90.000 V: 0.000 W: 180.000 /R /A /NF /J6F0 /J4F0 /0 9:47:33 发送数据:go align(here,0) 要用到的指令 10:37:16 发送数据:$Login,123 [1次] 10:37:16 收到数据:#Login,0 9:49:36 发送数据:$Logout [1次] 9:49:37 收到数据:#Logout,0 10:45:06 发送数据:$SetCurRobot,0 [1次] 10:45:06 收到数据:#SetCurRobot,0 10:52:51 发送数据:$SetMotorsOn,0 [1次] 10:52:51 收到数据:#SetMotorsOn,0 10:52:51 发送数据:$SetMotorsOFF,0 [1次] 10:52:51 收到数据:#SetMotorsOFF,0 10:52:00 发送数据:$Execute,"Reset" [1次] 10:52:00 收到数据:#Execute,0 18:37:13 发送数据:$Execute,"move Here + x(50)" [1次] 18:37:15 收到数据:#Execute,0 8:17:31 发送数据:$Execute,"print RealPos" [1次] 8:17:31 收到数据:#Execute," X: 200.001 Y: 450.000 Z: 260.000 U: 90.000 V: 0.000 W: 179.999 /R /A /NF /J6F0 /J4F0 /0 " 9:51:41 发送数据:$Execute,"Go XY(0100.000, 0450.000, 0260.000, 0090.000, 0000.000, 0180.000)/R /A /NF /J6F0 /J4F0" [1次] 9:51:42 收到数据:#Execute,0 13:16:12 发送数据:$Execute,"Go XY(0100.000, 0450.000, 0260.000, 0090.000, 0000.000, 0180.000)/R /A /NF /J6F0 /J4F0" [1次] 13:16:14 收到数据:#Execute,0 13:16:12 发送数据:$Execute,"Go XY(-100.000, +450.000, 0260.000, 0090.000, 0000.000, 0180.000)/R /A /NF /J6F0 /J4F0" [1次] 13:16:14 收到数据:#Execute,0 13:18:32 发送数据:$Execute,"Go XY( 100.000, 450.000, 260.000, 090.000, 000.000, 180.000)/R /A /NF /J6F0 /J4F0" [1次] 13:18:33 收到数据:#Execute,0 9:51:41 发送数据:$Execute,"PASS(100, 450, 260, 90, 0, 180)/R /A /NF /J6F0 /J4F0" [1次] 9:51:42 收到数据:#Execute,0 错误代码 错误代码 内容 10 远程命令未以$开头 11 远程命令错误 未执行Login 12 远程命令格式错误 13 Login命令密码错误 14 要获取的指定数量超出范围 (小于1或大于100) 忽略了要获取的数量 指定了一个字符串参数 15 参数不存在 参数尺寸错误 调用了超出了范围的元素 19 请求超时 20 控制器未准备好 21 因为正在运行Execute,所以无法执行 99 系统错误 通信错误 $Execute,"Go XY( 100.000, 450.000, 260.000, 090.000, 000.000, 180.000)/R /A /NF /J6F0 /J4F0" 下面勇哥把epson的帮助搬过来,以方便查阅。 分别为:远程以太网指令、指令输出结果、指令错误表 Remote Ethernet Command
Format: $ remote command {, parameter....} terminator Remote CommandParameterContentsInput Acceptance ConditionLoginPasswordStart the Controller Remote Ethernet function Authentication by password Execute Login correctly, commands execution is enabled until LogoutAvailable any time(*10)LogoutExit Controller Remote Ethernet function After Logout, execute the Login command to start remote Ethernet function. Logout during task execution causes an error.Available any time(*10)StartFunction No.Execute the function of specified number (*2)Auto ONReady ON Error OFF EStop OFFSafeguard ON StopStop all tasks and commandsAuto ONPausePause all tasks (*3)Auto ONRunning ONContinueContinue paused tasksAuto ONPaused ONResetClear emergency stop and error (*4)Auto ONReady ONSetMotorsOnTurn ON the robot motor (*5)Auto ONReady ON EStop OFFSafeguard OFFSetMotorsOffTurn OFF the robot motorAuto ONReady ONHomeMove the arm to home position defined by userAuto ONReady ON Error OFF EStop OFFSafeguard OFFGetIOI/O bit No.Acquire the specified I/O bitAvailable any time (*10)SetIOI/O bit No. & valueSet the specified I/O bit 1: Turn ON the bit 0: Turn OFF the bitReady ONGetIOByteI/O port No.Acquire the specified I/O port (8 bit) (*8)Available any time(*10)SetIOByteI/O port No. & valueSet the I/O specified port (8 bit) (*8)Ready ONGetIOWordI/O word port No.Acquire the specified I/O word port (16 bit) (*8)Available any time(*10)SetIOWordI/O word port No. & valueSet the I/O specified word port (8 bit) (*8)Auto ONReady ONGetMemIOMemory I/O bit No.Acquire the specified memory I/O bit (*8)Available any time(*10)SetMemIOMemory I/O bit No. & valueSet the specified memory I/O bit (*8) 1: Turn ON the bit 0: Turn OFF the bitAuto ONReady ONGetMemIOByteMemory I/O port No.Acquire the specified memory I/O port (*8)Available any time(*10)SetMemIOByteMemory I/O port No. & valueSet the specified memory I/O port (8 bit) (*8)Auto ONReady ONGetMemIOWordMemory I/O word port No.Acquire the specified memory I/O word port (16 bit) (*8)Available any time(*10)SetMemIOWordMemory I/O word port No. & valueSet the specified memory I/O word port (16 bit) (*8)Auto ONReady ONGetVariable Parameter name {, type} ____________________________ [Parameter name] (Array element), [Parameter name type], [Number to acquire] Acquire the value of backup (Global Preserve) parameter (*6) _________________________________________________________ Acquire the value of backup (Global Preserve) array parameter (*7) Available any time (*10)SetVariableParameter name & value {, type}Set the value in the backup (Global Preserve) parameter (*6)Auto ONReady ONGetStatusAcquire the Controller stateAvailable any time (*10)ExecuteCommand stringExecute the command (*8) (*9)Auto ON Ready ON Error OFFEStop OFF Safeguard OFFAbortAbort the command execution (*8)Auto ON
(*1) The Controller state bit from GetStatus. (*2) Execute the function specified in the Main[Function No.]. Function NameFunction No.Main0Main11Main22Main33Main44Main55Main66Main77
(*3) Pause command is not available for “NoPause task” and “NoEmgAbort task”. For the details, refer to the help or the section “Pause” in the EPSON RC+5.0 Language reference manual. (*4) I/O output will be turned OFF and the robot parameter will be initialized. For the details, refer to the help or the section “Reset” in the EPSON RC+5.0 Language reference manual. (*5) The robot parameter will be initialized. For the details, refer to the help or the section “Motor” in the EPSON RC+5.0 Language reference manual. (*6) Parameter type means {Boolean | Byte | Double | Integer | Long | Real | String}. Type specified: for the backup parameters when the parameter name and type are same. Type not specified: for the backup parameters when the parameter names are same.
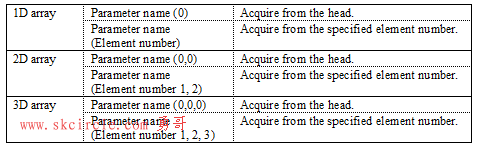
(7) Acquiring the value of array parameter is supported in the firmware Ver.1.10.*.* or later. For the array element, specify an element you acquire as the following: You need to specify an element if when acquiring from the head of the array.
You cannot omit the parameter type and number to acquire. You cannot specify a string for the parameter type. Available number to acquire is up to 100. If you specify a number over the number of array elements, you have an error.
e.g.) "$GetVariable,gby2(3,0),Byte,3" Acquires values of gby2(3,0), gby2(3,1), gby2(3,2) of Byte type 2D array parameter gby2.
(*8) Following functions are supported in the firmware 1.13.*.* or later.. Acquiring and setting I/O port Acquiring and setting I/O word port Acquiring and setting memory I/O Acquiring and setting memory I/O port Acquiring and setting memory I/O word port Execution and abortion of command (*9) Specify the command and parameters in the double quotation marks. Following commands are available while Execute is running. Commands available while Execute is running Remote Command Abort GetStatus SetIO SetIOByte SetIOWord SetMemIO SetMemIOByte SetMemIOWord When the commands specified in (SetIO, SetIOByte, SetIOWord, SetMemIO, SetMemIOByte, SetMemIOWord) are the same and executed at the same time, the command executed later will result in error. Make sure to check the execution result by using GetStatus after the execution of Execute command and output command which the Execute command is being executed. (*10) “Available anytime” applies only when the following conditions are met. When “Remote Ethernet” is set as the control device, or “Remote Ethernet” is not set as the control device, but set to be used for monitoring. Commands available for monitoring When the Remote Ethernet control is not set as the control device but set to be used for monitoring, the following commands are only available to be executed. Remote commandMainLoginLogoutGetIOGetIOByteGetIOWordGetMemIOGetMemIOByteGetMemIOWordGetVariableGetStatus Remote Ethernet Response
When the Controller receives the command correctly, the response in the following format is shown in the executing command. Command Format Remote command that acquire the value Except GetIO, GetVariable, and GetStatus#[Remote command],[0] terminatorGetIO#GetIO,[0 | 1] terminator *1GetMemIO#GetMemIO,[0 | 1] terminator *1GetIOByte#GetIOByte,[ Hex string (00 to FF) of Byte (8Bit)] terminator GetMemIOByte#GetMemIOByte,[ Hex string (00 to FF) of Byte (8Bit)] terminatorGetIOWord#GetIOWord,[ Hex string (0000 to FFFF) of Word (16Bit)] terminatorGetIOMemWord#GetMemIOWord,[ Hex string (0000 to FFFF) of Word (16Bit)] terminatorGetVariable# GetVariable,[Parameter value] terminatorGetVariable (array)# GetVariable,[ Parameter value 1],[ Parameter value 2],...,terminator *4GetStatus#GetStatus,[Status],[Error, Warning code] terminator Example) #GetStatus,aaaaaaaaaa,bbbb *2 *3ExecuteIf the value is returned as a result of command execution #Execute,”[Execution result]” terminator
*1 [0 | 1] I/O bit ON: 1/ OFF: 0 *2 Status In the example above, 10 digits “aaaaaaaaaa” is for the following 10 flags. Teach/Auto/Warning/SError/Safeguard/EStop/Error/Paused/Running/Ready 1 is ON /0 is OFF If Teach and Auto are ON, it is 1100000000. *3 Error / Warning code It is indicated in 4 digits. If there is no error and warning, it is 0000. e.g.)1 : #GetStatus,0100000001,0000 The bits for Auto and Ready is ON (1). This means that AutoMode is ON and be in Ready state. Command execution is enabled. e.g.)2 : #GetStatus,0110000010,0517 This means the warning occurs during the operation. Take appropriate action for the warning code. (In this case, warning code is 0517 ) FlagContentsTeachTurn ON in the TEACH modeAutoTurn ON in the remote input acceptance conditionWarningTurn ON in the warning condition Task can be executed as usual even a warning condition. However, take action for the warning as soon as possible.SErrorTurn ON in the serious error condition When a serious error occurs, Reboot the Controller to recover from the error condition. “Reset input” is not available.SafeguardTurn ON with safety door openEStopTurn ON in the emergency conditionErrorTurn ON in the error condition Use “Reset input” to recover from the error condition.PausedTurn ON with paused taskRunningTurn ON with task executing Turn OFF when “Paused output” is ONReadyTurn ON with the Controller completed the startup and no task executing
*4 It returns values of specified number in the Number to acquire.
Remote Ethernet Error Response
When the Controller can not receive the remote command correctly, the error response is shown in the following format. Format: ![Remote command],[Error code] terminator Error Code Contents 10Remote command does not begin with $11Remote command is wrong Login is not executed12Remote command format is wrong13Login command password is wrong14Specified number to acquire is out of range (Less than 1 or more than 100) Number to acquire is omitted Specified a string parameter15Parameter does not existDimension of parameter is wrong Element out of range is called19Request time out20Controller is not ready99System errorCommunication error
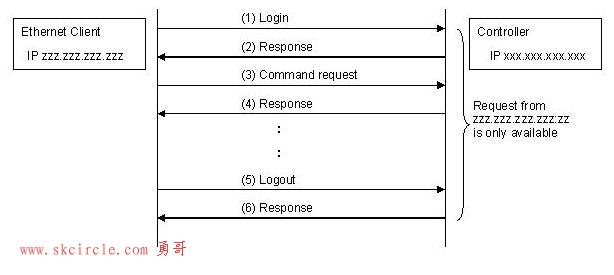
Communication Sequence
--------------------- 作者:hackpig来源:www.skcircle.com版权声明:本文为博主原创文章,转载请附上博文链接! 本文出自勇哥的网站《少有人走的路》wwww.skcircle.com,转载请注明出处!讨论可扫码加群: 
|
【本文地址】
今日新闻 |
推荐新闻 |