台达伺服【B3】 |
您所在的位置:网站首页 › 三菱伺服参数一览表 › 台达伺服【B3】 |
台达伺服【B3】
|
接线图:
T-REF: 输入转矩(正负10V) GND: 信号公共端 MON1: 输出监视1(正负8V) P0.003参数 MON2: 输出监视2(正负8V) COM+: DC24V SON: 伺服启动 CTRG: 命令使能触发(上升沿) POS0: 命令选择拨码 POS1: 命令选择拨码 ARST: 复位 NL: 反转限位(接常闭) PL: 正传限位(接常闭) EMGS: 紧急停止(接常闭)
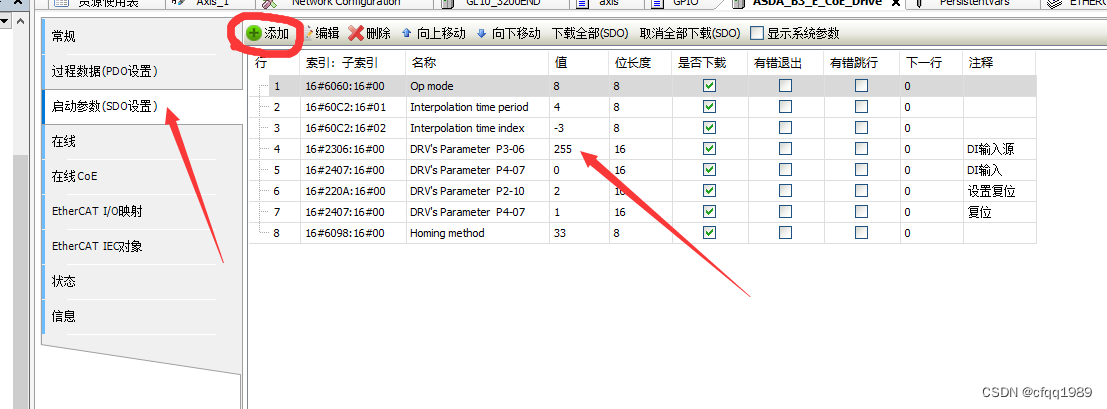
SRDY: 伺服准备就绪 ZSPD: 电机零速 HOME: 回零完成 TPOS: 定位完成 ALRM: 伺服故障 A: 编码器ABZ脉冲输出 B: Z: OCZ: 编码器0度 参数://====通信参数:287页======================================== P3. 000 = 0001 站号01 P3. 001 = 0201 can500kps波特率9600(0:4800,1:9600,2:19200,3:38400,4:57600,5:115200) P3. 002 = 0008 数据位8,奇检验odd,停止位1 P3. 003 = 0001 通信故障处理:警告并减速(P5.003) P3. 004 = 0001 通讯逾时sec秒:1秒(调试用0) P3. 006 = 000F DI开关来源 0:外部,Bit 0 ~ Bit 8 对应至 DI1 ~ DI9(P2.010~P2.017)P2.036 P3. 007 = 0000 延时回复 0.5ms P4. 007 bit对应软开关DI 0x0011(表示sdi5和sdi1为ON,软开关) //====通信 PR 模式======================================== 1:CTRG 保持低电平 2:POS 5~0 配置拨码 3:CTRG 上升沿触发命令 pos 543210配置成0x00001 对应 # 000001 寄存器公式 PR #n(n=1~49)对应 P6-XX = 2n+1 PR #n (n=50~63)对应 P7-XX = 2(n-50)+1 //====数据帧======================= Slave Address 01H 从站地址 Function 03H 功能码 启始数据位置 02H (高字节) 00H (低字节) 资料数目 00H(高字节) 02H(低字节) CRC (Check Low) (低字节) CRC (Check High) (高字节)//=====部分说明================================= 伺服初始化:P2.10引脚定义 00ZXX Z0:断开有效 NL,cwl 负限位 0x22 PL,ccwl 正限位 0x23 ORGP 原点 0x24 SHOM 当前位置设置为零点 0x27 SON 伺服使能 0x01 ARST 复位 0x02 STP 电机停止 0x46 EMGS 紧急停止 0x21 PFQS 紧急刹停0x47 GAINUP 增益 0x03 CCLR 清除脉冲0x04 ZCLAMP 零速运行0x05 CMDINV 反方向0x06 CTRG 触发0x08 TRQLM 限力0x09 SPDLM 限速0x10 ZSPD 电机零速状态 TSPD 电机目标速度到达 POS0 多段拨码式0x11 POS1 0x12 POS2 0x13 POS3 0x1A POS4 0x1B POS5 0x1C POS6 0x1E ABSE 绝对模式 ABSC 位置清零 ABSQ SPD0 s多段速 SPD1 TCM0 力多段 TCM1 输出:P2.18引脚定义 00ZXX Z0:极性 SRDY 伺服上电0x01 ALRM 伺服故障0x07 BRKR 刹车0x08 HOME 在原点0x09 TPOS 定位完成0x05 ABSW 绝对值故障0x0d IDXD 分度原点0x0e OLW 过负载0x10 //==参数设置================================= P1.000 = 1092 脉冲输入z逻辑(UZYX)uy=19表示1us滤波(信号建议4倍),zx=02表示:方向+脉冲(z表示信号逻辑) P1.001 = 0009 (UZYX)u=0(p2.010~p2.022保持设定值)Z电机方向 yx=09表示PR+T P1.002 = 0011 (UZYX)Y力限,X速限 P1.003 = 0000 模拟量监视输出(UZYX)y脉冲极性x MON1和2 :极性 P1.004 MON1比例 P1.022 = 0012 PR滤波 x10ms P1.032 = 0000 电机停止模式:Y=0 动态刹车 P1.038 = 1rpm 零速信号条件 P1.039 = 3000rpm 转速到达信号条件 P1.041 = 50% 扭矩比例 P1.042 = 0001 伺服使能后电磁刹车释放延时ms P1.043 = 0005 脱机后刹车抱闸延时ms P1.044 = 分子16777 216 P1.045 = 分母100 000 P1.054 = 位置确认范围 167772 P1.055 = 最大速度 P1.056 = 预过载百分比0~120 P1.057 = 防撞百分比 0~300 P1.058 = 防撞时间1~1000ms 2个值都超过时AL30 P1.064 = 0000 模拟位置控制PT 0关 P1.066 = 0010 模拟位置+10v圈数DEC 0~2000(200圈) P1.074 ABZ位置输出源 P1.087 = 10 扭力回零准位 1~300% P1.088 = 2000 扭力计时 2~2000ms P1.112 单边扭力限制 -500~500 P1.012~P1.014 P2.000 位置比例增益 P2.008 初始化参数 P2.009 = 0010 DI输入滤波ms(dec)0~20ms P2.010 = 0001 DI1功能 UZYX Z0正逻辑1常开 YX:SON 0x01 伺服使能 p4.007 P2.011 = UZYX DI2功能 Z0常闭 ARST 0x02 复位 P2.012 = UZYX DI3功能 Z0常闭 SHOM 0x27 设置零点 P2.013 = UZYX DI4功能 Z0常闭 0x37 点动正转 P2.014 = UZYX DI5功能 Z0常闭 0x38 点动反转 P2.015 = UZYX DI6功能 Z0常闭 0x39 EV1事件 P2.016 = UZYX DI7功能 Z0常闭 CTRG 0x08 PR模式上升沿触发 P2.017 = UZYX DI8功能 Z0常闭 0x11 POS0 PR准位 P2.036 = UZYX DI9功能 Z0常闭 NL 0x22 负限位 P2.037 = UZYX DI10功能 Z0常闭 PL 0x23 正限位 P2.038 = UZYX DI11功能 Z0常闭 EMGS 0x21 急停 P2.039 = UZYX DI12功能 Z0常闭 STP 0x46 停转 P2.040 = UZYX DI13功能 Z0常闭 P2.018 = UZYX DO1功能 Z0常闭 YX: 0x01 准备就绪 P2.019 = UZYX DO2功能 Z0常闭 0x02 使能状态 P2.020 = UZYX DO3功能 Z0常闭 0x03 零速信号 P2.021 = UZYX DO4功能 Z0常闭 0x05 TPOS 定位完成 P2.022 = UZYX DO5功能 Z0常闭 0x07 ALRM 故障 P2.041 = UZYX DO6功能 Z0常闭 0x08 刹车信号 0x10 预过载信号 P2.047 = 0002 自动抑制共振 X=2开 P2.048 = 100 共振准位,越小越震 P2.050 = 1 清除脉冲 P2.052 分度总行程 //====回原点======================================== SHOM DI当前位置设置为零点 0x27 P5.007 = 0 (0:回原点, 1~99:PR1#~63# PR程序)1000是DI.STP P6.000 = 0000 0000 原点复归定义(DCBA UZYX)yx=0 #0完成后停止,z加速,u第一速,a第二速,c空,d=1上电复归 P6.001 = 2000 原点的参考坐标值 P5.004 = 0x0009 回零模式:(UZYX)x=9正扭回原点x=A反扭回原点,y=0反转找Z点,z=0遇到软限位报警 P5.005 = 20rpm 第一回原点高速度2000rpm P5.006 = 5rpm 第二回原点低速度 P1.087 = 10 扭力回零准位 1~300% P1.088 = 2000 扭力计时 2~2000ms P5.021 = 300 #1速度(越小越快,0~3000转所用 x ms) P5.022 = 3000 #2速度 P5.008 正 软限位 P5.009 负 软限位 P5.016 轴位置(电机编码器) P5.017 轴脉冲 P6.002 = 2 #1功能码 //====监视======================== P0.002 地址 0004H 0005H P0.009/P0.017 0012H 0013H P0.010/P0.018 0014H 0015H P0.011/P0.019 0016H P0.012/P0.020 0018H P0.013/P0.021 001AH 列:P0.09显示的值由P0.017控制 P0.035是寄存器指针,P0.025的值赋给指针的寄存器。 000 电机编码器位置 001 命令位置puu 002 位置误差puu 003 电机编码器脉冲pulse 004 齿轮比后命令位置pulse 005 位置误差pulse 006 脉冲命令频率 kpps 007 电机速度 0.1rpm(有过滤) 008 模拟量速度 009 命令速度 010 模拟量力矩 011 命令力矩 % 012 平均负载 % 每20ms 013 峰值负载 % 014 DC电容电压 015 惯量比 016 igbt温度 018 Z相偏移 -4999~+5000 035 命令分度坐标puu 038 电池电压 039 DI输入信号 P4.007软置位(0x0011 DI5和DI1被置1) P3.006 DI输入源(0外部1内部) 041 回P0.046值 049 CN1脉冲计数 051 电机速度 054 电机当前力矩 055 电机当前电流 056 DC电容电压(0.1V) 091 分度坐标puu -80 编码器错误率 -91过负载计数 -124 编码器温度 //====伺服使能========== P3.006决定DI输入开关源 (0外部,1内部)00ff后p2.010=0001,p4.007=0001表示son置一 P4.007 软件置位DI P2.010 决定DI功能 P2.030 =1 强制 伺服使能 P4.005 电机点动速度 ================== P2.010=0001 P3.006=0000 P4.007=00FF canopen配置:
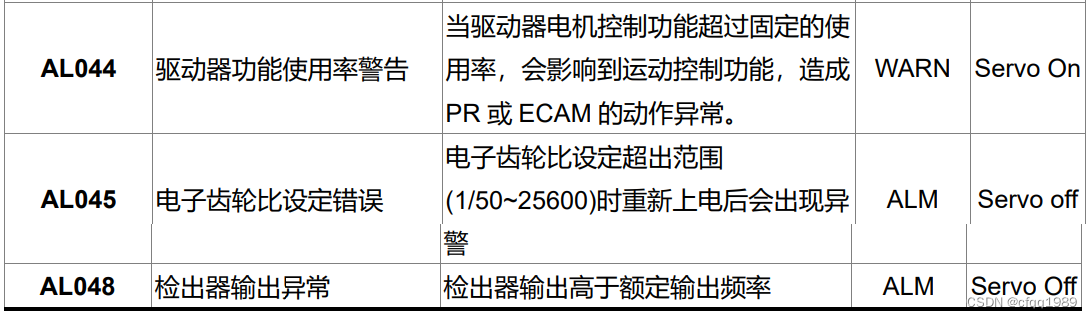
故障码:
|





【本文地址】
今日新闻 |
推荐新闻 |