FX5u控制4个伺服,标签分层,定位控制参数设定、回原点、JOG手动等,多机种选择的完整项目 |
您所在的位置:网站首页 › 三菱q系列回原点程序 › FX5u控制4个伺服,标签分层,定位控制参数设定、回原点、JOG手动等,多机种选择的完整项目 |
FX5u控制4个伺服,标签分层,定位控制参数设定、回原点、JOG手动等,多机种选择的完整项目
|
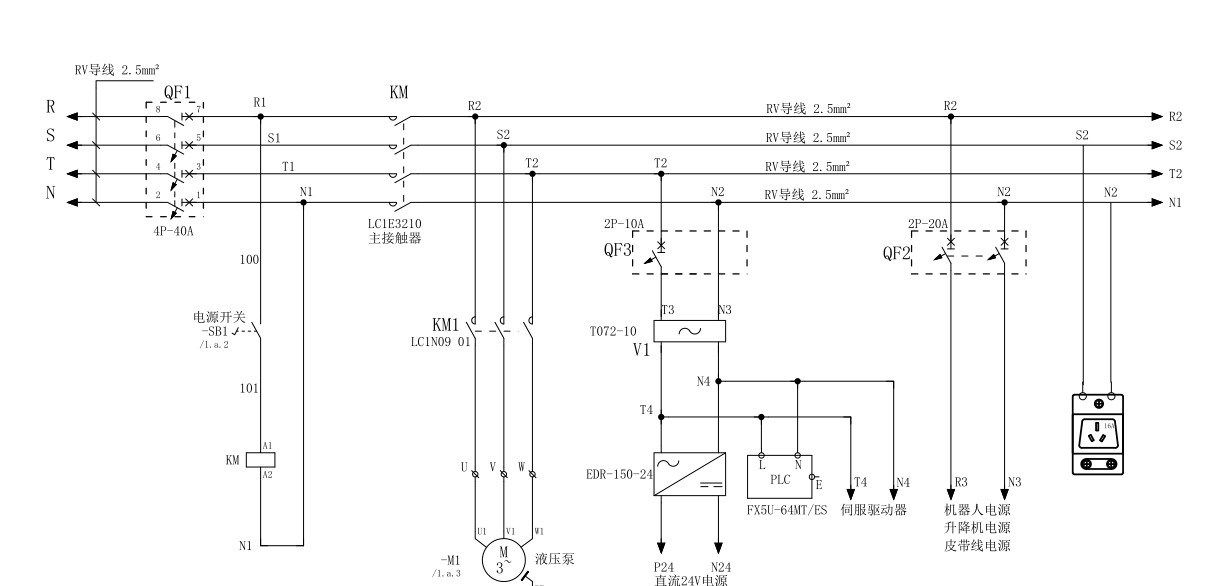
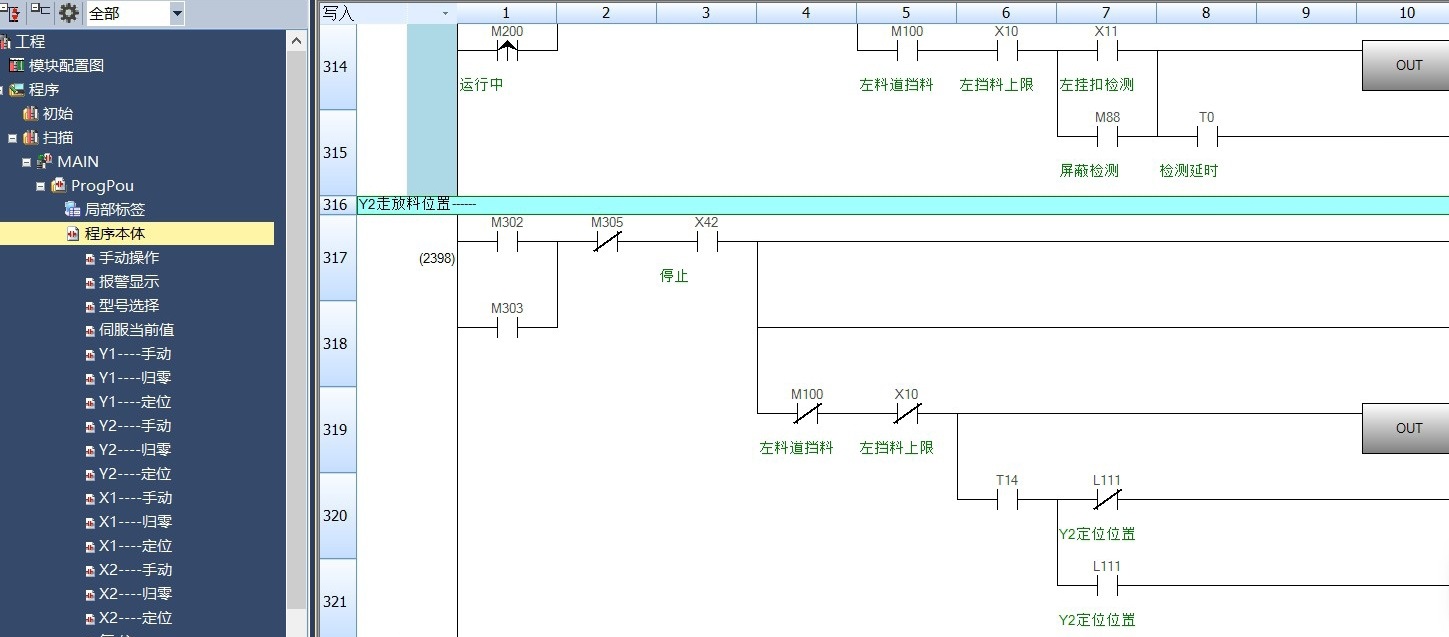
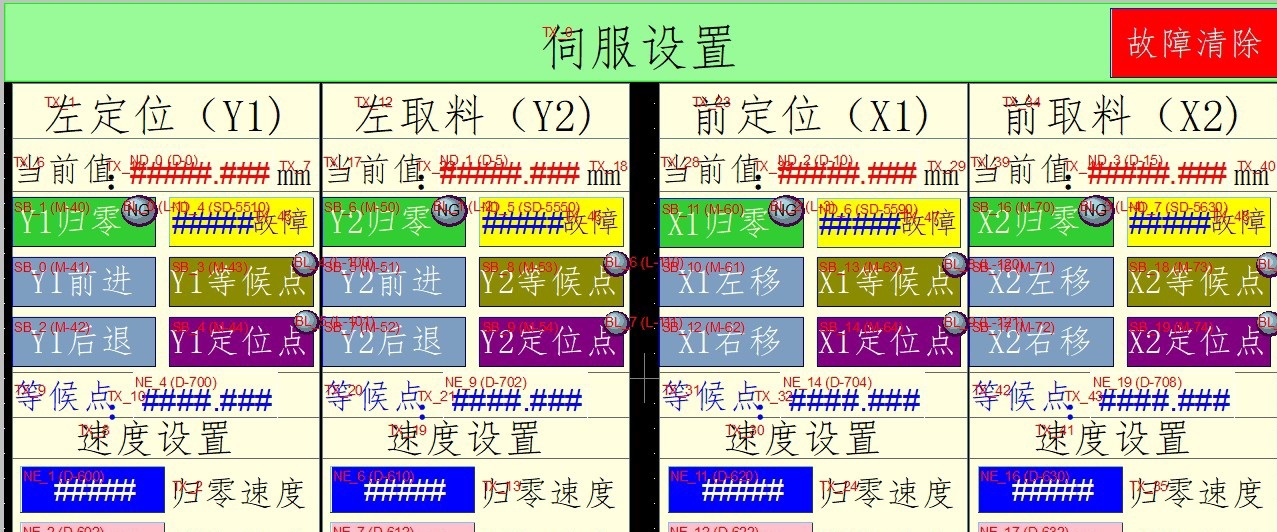
FX5u控制4个伺服,一个完整的项目 程序用 标签分层,说明了定位控制中的公共参数设定、回原点、JOG手动、绝对定位、相对定位、控制等部分,威纶程序报警界面.多个机种选择,手动,自动,暂停,包括有: 1、plc程序一份 2、设备说明书一份 3、电路图一份 4.威纶屏程序一份 5.io表一份 6.电气清单一份 ID:9310668279202548 工控老司机 FX5u控制4个伺服,一个完整的项目 在现代工业自动化中,控制系统起着至关重要的作用。而在一个完整的项目中,FX5u控制4个伺服的实现则是其中一个重要的技术难点。本文将围绕此主题展开,详细介绍这个项目实现的关键点、技术原理和程序设计。 首先,我们来介绍一下这个项目的整体结构。整个项目使用了FX5u作为控制器,通过控制这四个伺服电机的运动来实现对整个系统的精确控制。在控制程序的编写中,我们使用了标签分层的方法,这不仅能使程序结构清晰、易于维护,还能提高代码的可读性。 在此项目中,我们首先需要进行参数设定。通过合理的参数设定,可以确保系统能够根据要求进行精确的定位控制。在参数设定过程中,我们需要考虑到伺服电机的特性以及运动要求等因素,从而确定合适的参数值。 接下来是回原点功能的实现。回原点是伺服电机在开始工作之前必须执行的一项任务。它通过将伺服电机驱动器回到预定的初始位置,来确保系统的初始状态是可控的。在实际应用中,我们可以通过设定相关的回原点程序,来实现伺服电机的回原点功能。 JOG手动控制是实现对伺服电机运动的一种常见方式。在此项目中,我们通过编写相应的程序,使得操作人员可以通过JOG手动控制按钮,对伺服电机进行灵活的控制。这在系统的调试和维护中具有重要作用。 在定位控制中,相对定位和绝对定位是两种常见的方式。相对定位是指以当前位置为基准,进行相对距离的移动;而绝对定位则是指将位置控制设置为某个固定值。在实际应用中,我们可以根据具体需求,选择合适的定位方式。 最后,我们还需要对整个系统进行控制。通过编写相应的控制程序,我们可以实现对伺服电机运动的整体控制。在程序设计中,我们可以根据具体要求,进行运动模式的选择和切换,例如手动、自动和暂停等。 在以上的项目中,我们还使用了威纶程序报警界面,这大大提高了系统的可操作性和可视化程度。通过威纶程序报警界面,我们可以及时了解到系统运行中可能出现的异常情况,并进行相应的处理。 在此项目中,为了满足多个机种的需求,我们还提供了灵活的选择。无论是手动操作还是自动控制,都可以根据实际情况进行选择。这为用户提供了更大的灵活性和可操作性。 在整个项目中,我们还提供了众多的支持文件。PLC程序、设备说明书、电路图、威纶屏程序、IO表和电气清单等,这些支持文件不仅能提供给用户参考和使用,还能在系统的调试和维护中起到重要的辅助作用。 综上所述,FX5u控制4个伺服的项目实现涉及到了多个关键点和技术原理。通过合理的程序设计、参数设定和控制方式选择,我们能够实现对整个系统的精确控制。同时,灵活的选择和丰富的支持文件也使得该项目具有较高的可操作性和可扩展性。 以上相关代码,程序地址:http://matup.cn/668279202548.html |
【本文地址】
今日新闻 |
推荐新闻 |