ABB机器人CCLink 配置 |
您所在的位置:网站首页 › 三菱devicenet配置 › ABB机器人CCLink 配置 |
ABB机器人CCLink 配置
|
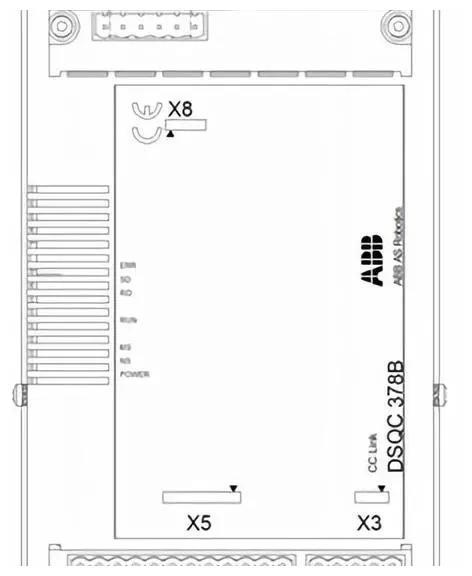
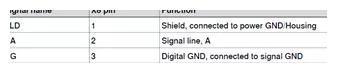
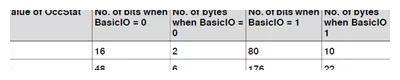
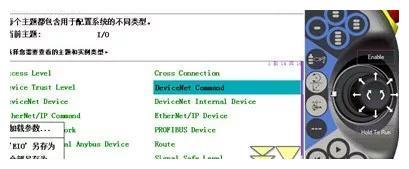
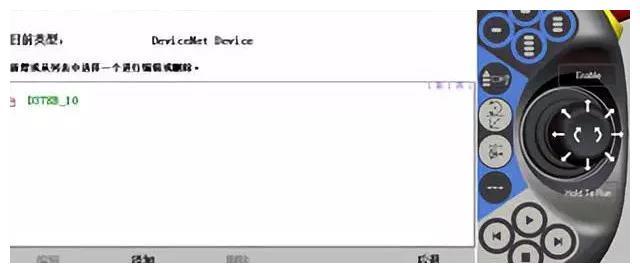
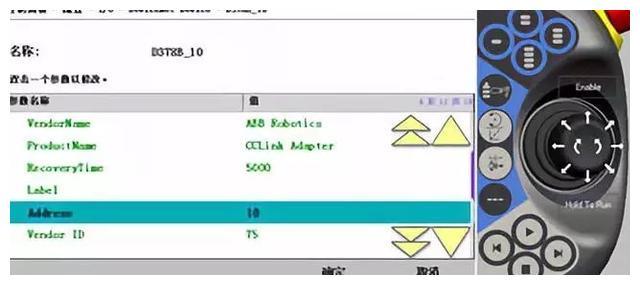
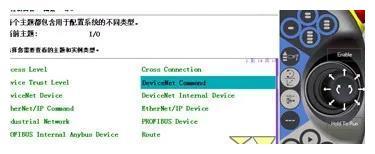
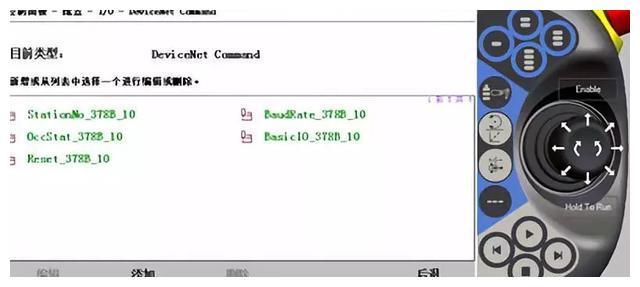
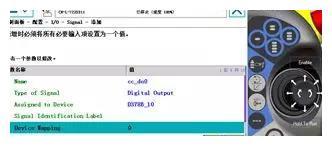
来源: ABB机器人实战技巧 ABB机器人提供CC-Link总线的支持。ABB机器人通过DSQC 378B(如下图)模块,把CC-Link协议转化成Devicenet协议,与机器人控制器通讯。 上图X5部分为Devicenet通讯与地址设置端子,具体参见3.1节Devicenet的设置。 X3部分为24V电源部分,针脚定义如下: X8端子为CC-Link总线接线端子,具体针脚定义如下。 使用DSQC 378B模块需要机器人有709-1 DevicenetMaster/Slave选项。 配置DSQC 378B,有以下参数需要注意。 参数类型 允许值 作用 Station Number 1-64 确定在CC-Link总线中的地址 BaudRate 0-4 according to: 0 = 156 kbps 1 = 625 kbps 2 = 2.5 Mbps 3 = 5 Mbps 4 = 10 Mbps 确定通讯速率 OccSta 1-4 according to: 1 = 1 occupied station 2 = 2 occupied stations 3 = 3 occupied stations 4 = 4 occupied stations Occupied Sations。确定此从站确定的虚拟站数量。 BasicIO 0-1 according to: 0 = Bit I/O only 1 = Bit I/O and word I/O 确定通讯数据类型 OccSta和 BasicIO共同决定了输入输出的数量,具体见下表。 以上参数需要通过DevicenetCommand进行设置。为方便设置,可以从以下位置获取模板并配置。 1)打开robotstudio,进入Add-Ins,在左侧找到对应的机器人robotware版本,右击——“打开数据包文件夹” 2)进入如下路径 C:ProgramDataABB IndustrialITRoboticsITDistributionPackagesABB.RobotWare-6.08.0134RobotPackagesRobotWare_RPK_6.08.0134utilityserviceioconfigDeviceNet 3)d378B_10.cfg为需要的模板文件。(此处假设d378B模块在Devicenet网络下的地址为10) 4)进入示教器-控制面板-配置,点击左下角“文件”——“加载参数”,选择步骤3找到的配置文件。完成后重启。 5) 进入“配置”-DevicenetDevice下可以看到新加入的D378B_10设备,如果Devicenet地址不是10,可以进入修改。 6) 进入Devicenet Command对CC-Link相关参数进行设置 7)参数含义参见本节一开始所述表格。 下图示例的含义为: StationNumber:1; BaudRate:156kbps; OccSta:1; BasicIO:0; 输入输出各为:16bit(2bytes) 8)添加signal,方法同前文所述。Assigned to Device选择刚刚配置完毕的D378B_10. |



【本文地址】
今日新闻 |
推荐新闻 |