机器人视觉三维成像技术全解析 |
您所在的位置:网站首页 › 三维视觉识别软件 › 机器人视觉三维成像技术全解析 |
机器人视觉三维成像技术全解析
|
点击上方“小白学视觉”,选择加"星标"或“置顶” 重磅干货,第一时间送达
在工业4.0时代,国家智能制造高速发展,传统的编程来执行某一动作的机器人已经难以满足现今的自动化需求。在很多应用场景下,需要为工业机器人安装一双眼睛,即机器人视觉成像感知系统,使机器人具备识别、分析、处理等更高级的功能,可以正确对目标场景的状态进行判断与分析,做到灵活地自行解决发生的问题。 机器视觉系统组成 从视觉软件进入机器视觉行业,有必要全局认识一下机器视觉系统组成。 典型的机器视觉系统可以分为:图像采集部分、图像处理部分和运动控制部分。基于PC的视觉系统具体由如图1所示的几部分组成:
①工业相机与工业镜头——这部分属于成像器件,通常的视觉系统都是由一套或者多套这样的成像系统组成,如果有多路相机,可能由图像卡切换来获取图像数据,也可能由同步控制同时获取多相机通道的数据。根据应用的需要相机可能是输出标准的单色视频(RS-170/CCIR)、复合信号(Y/C)、RGB信号,也可能是非标准的逐行扫描信号、线扫描信号、高分辨率信号等。 ②光源——作为辅助成像器件,对成像质量的好坏往往能起到至关重要的作用,各种形状的LED灯、高频荧光灯、光纤卤素灯等都容易得到。 ③传感器——通常以光纤开关、接近开关等的形式出现,用以判断被测对象的位置和状态,告知图像传感器进行正确的采集。 ④图像采集卡——通常以插入卡的形式安装在PC中,图像采集卡的主要工作是把相机输出的图像输送给电脑主机。它将来自相机的模拟或数字信号转换成一定格式的图像数据流,同时它可以控制相机的一些参数,比如触发信号,曝光/积分时间,快门速度等。图像采集卡通常有不同的硬件结构以针对不同类型的相机,同时也有不同的总线形式,比如PCI、PCI64、Compact PCI,PC104,ISA等。 ⑤PC平台——电脑是一个PC式视觉系统的核心,在这里完成图像数据的处理和绝大部分的控制逻辑,对于检测类型的应用,通常都需要较高频率的CPU,这样可以减少处理的时间。同时,为了减少工业现场电磁、振动、灰尘、温度等的干扰,必须选择工业级的电脑。 ⑥视觉处理软件——机器视觉软件用来完成输入的图像数据的处理,然后通过一定的运算得出结果,这个输出的结果可能是PASS/FAIL信号、坐标位置、字符串等。常见的机器视觉软件以C/C++图像库,ActiveX控件,图形式编程环境等形式出现,可以是专用功能的(比如仅仅用于LCD检测,BGA检测,模版对准等),也可以是通用目的的(包括定位、测量、条码/字符识别、斑点检测等)。 ⑦控制单元(包含I/O、运动控制、电平转化单元等)——一旦视觉软件完成图像分析(除非仅用于监控),紧接着需要和外部单元进行通信以完成对生产过程的控制。简单的控制可以直接利用部分图像采集卡自带的I/O,相对复杂的逻辑/运动控制则必须依靠附加可编程逻辑控制单元/运动控制卡来实现必要的动作。
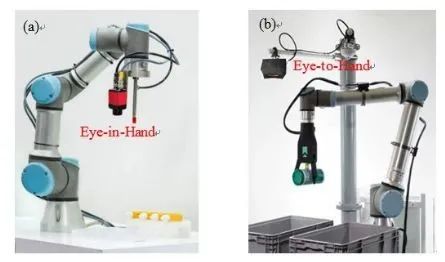
一个完整的机器视觉系统的主要工作过程如下: 1、工件定位检测器探测到物体已经运动至接近摄像系统的视野中心,向图像采集部分发送触发脉冲。 2、图像采集部分按照事先设定的程序和延时,分别向摄像机和照明系统发出启动脉冲。 3、摄像机停止目前的扫描,重新开始新的一帧扫描,或者摄像机在启动脉冲来到之前处于等待状态,启动脉冲到来后启动一帧扫描。 4、摄像机开始新的一帧扫描之前打开曝光机构,曝光时间可以事先设定。 5、另一个启动脉冲打开灯光照明,灯光的开启时间应该与摄像机的曝光时间匹配。 6、摄像机曝光后,正式开始一帧图像的扫描和输出。 7、图像采集部分接收模拟视频信号通过A/D将其数字化,或者是直接接收摄像机数字化后的数字视频数据。 8、图像采集部分将数字图像存放在处理器或计算机的内存中。 9、处理器对图像进行处理、分析、识别,获得测量结果或逻辑控制值。 10、处理结果控制流水线的动作、进行定位、纠正运动的误差等。 机器人视觉成像的结构形式 机器人视觉系统的主要功能是模拟人眼视觉成像与人脑智能判断和决策功能,采用图像传感技术获取目标对象的信息,通过对图像信息提取、处理并理解,最终用于机器人系统对目标实施测量、检测、识别与定位等任务,或用于机械人自身的伺服控制。 在工业应用领域,最具有代表性的机器人视觉系统就是机器人手眼系统。根据成像单元安装方式不同,机器人手眼系统分为两大类:固定成像眼看手系统(Eye-to-Hand)与随动成像眼在手系统(Eye-in-Hand, or Hand-eye),如下图2所示。
图 2 两种机器人手眼系统的结构形式 (a)眼在手机器人系统,(b)眼看手机器人系统 有些应用场合,为了更好地发挥机器人手眼系统的性能,充分利用固定成像眼看手系统全局视场和随动成像眼在手系统局部视场高分辨率和高精度的性能,可采用两者混合协同模式,如用固定成像眼看手系统负责机器人的定位,使用随动成像眼在手系统负责机器人的定向;或者利用固定成像眼看手系统估计机器人相对目标的方位,利用随动成像眼在手系统负责目标姿态的高精度估计等,如图3所示。
图 3 机器人协同视觉系统原理图 机器人视觉三维成像方法 3D视觉成像可分为光学和非光学成像方法。目前应用最多的还是光学方法,其包括:飞行时间法、激光扫描法、激光投影成像、立体视觉成像等。 飞行时间3D成像 飞行时间(TOF)相机每个像素利用光飞行的时间差来获取物体的深度。目前已经有飞行时间面阵相机商业化产品,如Mesa Imaging AG SR-4000, PMD Technologies Cam Cube 3.0,微软Kinect V2等。 TOF成像可用于大视野、远距离、低精度、低成本的3D图像采集,其特点是:检测速度快、视野范围较大、工作距离远、价格便宜,但精度低,易受环境光的干扰。例如Camcueb3.0具有可靠的深度精度( |



【本文地址】