[Open3d系列] |
您所在的位置:网站首页 › 三维空间曲线拟合 › [Open3d系列] |
[Open3d系列]
|
Open3d: 点云曲线拟合
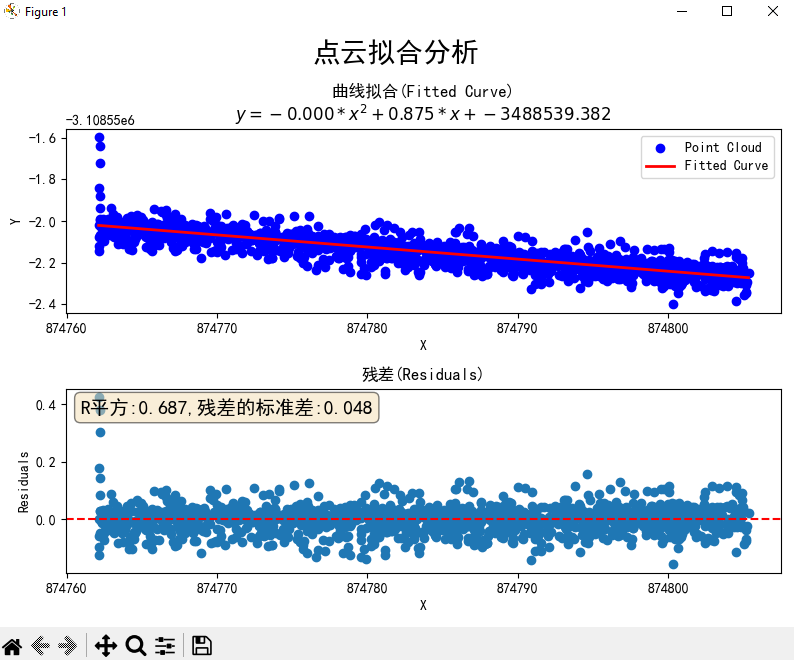
因为项目需要分析点云数据, 此文总结其中拟合点云的部分。 曲线拟合首先定一个曲线方程: def func(x, a, b, c): return a * x**2 + b * x + c然后将点云数据结构转换为numpy数组: points = np.asarray(pcd.points)读取点数组中,x轴、y轴的数组: xy_points = points[:, :2] x = xy_points[:,x_axis_idx] y = xy_points[:,y_axis_idx]调用scipy.optimize中的curve_fit进行点拟合, 得到各项系数: popt, pcov = curve_fit(func,x, y)以上结果系数在返回值popt中, 为一个元组 为了评估其拟合的好坏, 此处计算了残差, 然后分析其分布情况: residuals = y - func(x, *popt) # 通过标准差, 判断其离散程度 np.sqrt(np.sum(residuals**2)/x.shape[0]) < std_threshold 拟合评估R方,决定系数,又称拟合优度,通常用来描述数据对模型拟合程度的好坏,表示自变量X对因变量Y的解释程度。R方的取值在[0,1]之间,越接近1,说明回归拟合效果越好。比如R方=0.5,那么说明自变量可以解释因变量50%的变化原因。 R方计算公式: \[R^2=1-\frac{\sum_{i}^{n} (y_i-\hat{y_i})^2}{\sum_{i}^{n} (y_i-\bar{y_i})^2}=1-SSE/SST=SSR/SST \]其中\(\hat{y_i}\)为残差,\(\bar{y_i}\)为平均值。 \(SSE=\sum_{i}^{n} (y_i-\hat{y_i})^2\): 残差平方和,SSE越大,模型不能解释的部分越多,则拟合效果越差 \(SSR=\sum_{i}^{n} (\hat{y_i}-\bar{y_i})^2\): 回归平方和,是反映自变量与因变量之间的相关程度的偏差平方和 \(SST=\sum_{i}^{n} (y_i-\bar{y_i})^2\): 总体平方和,它是观测值与平均值之间差值的平方和。它的大小描述了数据集中的数的分散程度在多元线性回归中,R方有个致命的问题,那就是随着自变量X的个数增加,R方会越来越大,R方越来越大就会认为模型拟合越来越好,但是实际上可能是由于自变量个数的增加导致的R方增大。 调整后的R方来解决这个问题,将自变量个数考虑进公式中,就得到了调整后R方: \[R^2=1-(1-R^2)\frac{n-1}{n-k-1} \]其中n为样本数, k为自变量个数。 可视化 import matplotlib.pyplot as plt import matplotlib # 保证中文显示正常 matplotlib.rcParams['axes.unicode_minus'] = False matplotlib.rcParams['font.family'] = 'SimHei' x_fit = np.linspace(np.min(x), np.max(x), x.shape[0]) y_fit = func(x_fit, a_fit, b_fit, c_fit) # 创建两个子图 fig, (ax1, ax2) = plt.subplots(2, 1, figsize=(8, 6)) ax1.scatter(x,y, color='blue', label='Point Cloud') ax1.plot(x_fit,y_fit, color='red', linewidth=2, label='Fitted Curve') ax1.legend() ax1.set_xlabel('X') ax1.set_ylabel('Y') ax1.set_title(f"曲线拟合(Fitted Curve)\n$y={a_fit:.3f}*x^2+{b_fit:.3f}*x+{c_fit:.3f}$") # 绘制残差图 ax2.scatter(x, residuals) ax2.axhline(y=0, color='r', linestyle='--') ax2.set_xlabel('X') ax2.set_ylabel('Residuals') ax2.set_title('残差(Residuals)') # 计算R-squared mean_y = np.mean(y) ss_total = np.sum((y - mean_y) ** 2) ss_residual = np.sum(residuals ** 2) r_squared = 1 - (ss_residual / ss_total) # 值越大拟合效果越好 ax2.text(0.02, 0.95, f"R平方:{r_squared:.3f},残差的标准差:{np.sqrt(np.sum(residuals**2)/x.shape[0]):.3f}", transform=ax2.transAxes, fontsize=14,verticalalignment='top', bbox=dict(boxstyle='round', facecolor='wheat', alpha=0.5)) # 0.06为观测阈值 fig.suptitle("点云拟合分析", fontsize=20) plt.tight_layout() plt.show()最终效果:
|
【本文地址】