Goolge新AI算法实时生成3D场景 |
您所在的位置:网站首页 › 三维场景模型 › Goolge新AI算法实时生成3D场景 |
Goolge新AI算法实时生成3D场景
|
点击上方“3D视觉工坊”,选择“星标” 干货第一时间送达
3D模型又有新玩法,Goolge的新AI算法实时生成3D场景!对于3D、AR/VR来说,三维重建、模型获取又有新思路啦。
人工智能可以彻底改变计算机图形学的许多领域。新更新的的Google AI证明了这一点: 去年Google研究人员推出了“神经辐射场”(NERF),这是一种AI处理程序,可以从2D图像(例如照片)中提取3D深度数据。这样,NERF可以使用从不同角度拍摄的几张照片创建纹理3D模型。 为了获得令人印象深刻的结果,NERF针对扫描3D场景的每个视角计算了许多光束。单个光束可为房间中的每个单独点提供诸如颜色或透明度之类的信息(不管该点是被物体占据还是空着)。然后,将大量信息组合到光束终点处的最终可见纹理中。 此过程的计算量非常大:NERF需要100 teraflops才能计算800 x 800像素的单个图像。在最佳情况下,NERF会在十秒钟内在Nvidia RTX 2080上生成图像。这是一个概念证明,但对于实际使用而言太慢了。
NERF,SNeRG和激光雷达:现在,Google正在引入一种新方法,该方法可以每秒30帧以上的速度实时呈现与现代图形卡上的NERF视觉效果相同的结果。
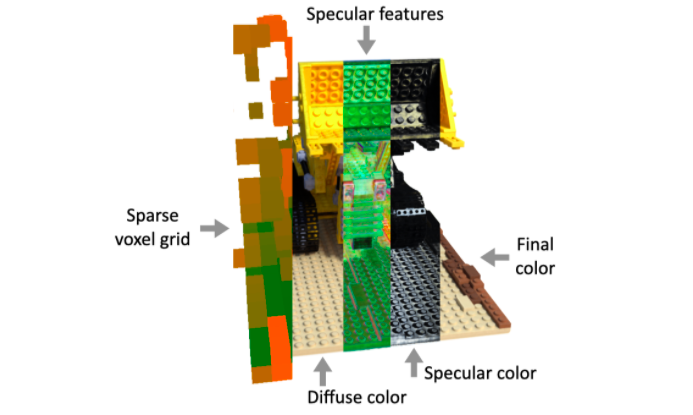
名为“稀疏神经辐射网格”(SNeRG)的解决方案速度更快,因为它可以将3D场景保存在低分辨率的体素块中。然后,SNeRG仅使用光束扫描对象所占据的体素。由于不再需要为每个光束计算数十或数百个点,因此这大大减少了计算工作。
然后将光线收集的颜色信息和其他特征存储在紧凑的3D纹理图集中。有关3D场景的所有必要信息都保存在网络中。
论文下载:公众号内回复【生成3D场景】 本文仅做学术分享,如有侵权,请联系删文。 下载1 在「3D视觉工坊」公众号后台回复:3D视觉,即可下载 3D视觉相关资料干货,涉及相机标定、三维重建、立体视觉、SLAM、深度学习、点云后处理、多视图几何等方向。 下载2 在「3D视觉工坊」公众号后台回复:3D视觉github资源汇总,即可下载包括结构光、标定源码、缺陷检测源码、深度估计与深度补全源码、点云处理相关源码、立体匹配源码、单目、双目3D检测、基于点云的3D检测、6D姿态估计源码汇总等。 下载3 在「3D视觉工坊」公众号后台回复:相机标定,即可下载独家相机标定学习课件与视频网址;后台回复:立体匹配,即可下载独家立体匹配学习课件与视频网址。 重磅!3DCVer-学术论文写作投稿 交流群已成立 扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。 同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。 一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。
▲长按加微信群或投稿
▲长按关注公众号 3D视觉从入门到精通知识星球:针对3D视觉领域的知识点汇总、入门进阶学习路线、最新paper分享、疑问解答四个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近3000星球成员为创造更好的AI世界共同进步,知识星球入口: 学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、可答疑解惑、助你高效解决问题 觉得有用,麻烦给个赞和在看~ |







【本文地址】
今日新闻 |
推荐新闻 |