三相双矢量SVPWM综合学习 |
您所在的位置:网站首页 › 三相电线电压和相电压角度 › 三相双矢量SVPWM综合学习 |
三相双矢量SVPWM综合学习
|
一、PMSM数学建模到SVPWM的优势
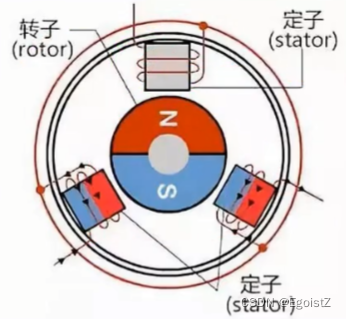
以三相PMSM为例,考虑如上的电机系统,对于自然坐标系(ABC)下有电压方程: 其中,相电压 是电机的感应电动势。相电流流过线圈,在线圈周围空间会激发磁场,磁力线就会穿过线圈;正弦交流电电流是变化的,磁通量就会发生变化,在线圈中产生感应电动势。 这里的磁链表示为一个合成的向量,和电角度有关。电动机的运转原理是给ABC三相绕组通入相位差120度的三相交流电,三个绕组感应出不同的磁场,再有三个磁场合成一个磁链,如图所示。此处以电压表示。三相电以正弦规律变化,合成一个
又因为在电机运转过程中:
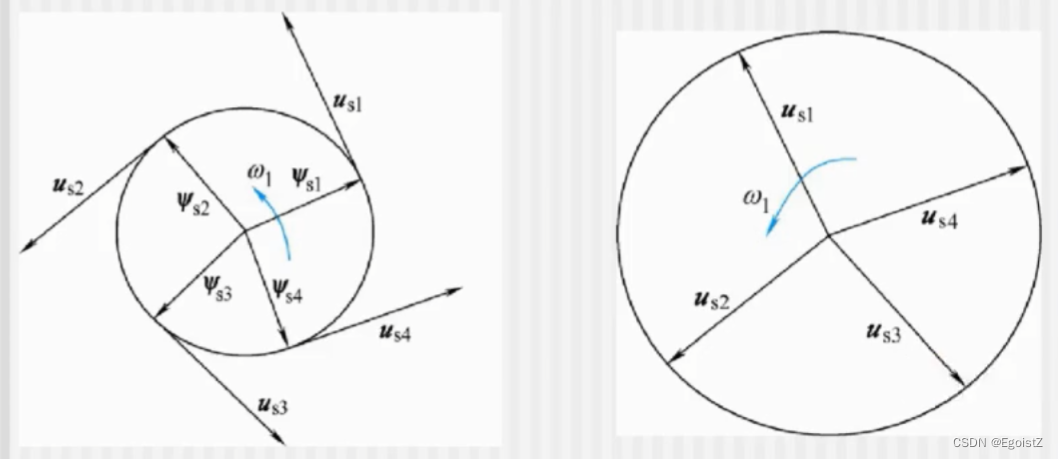
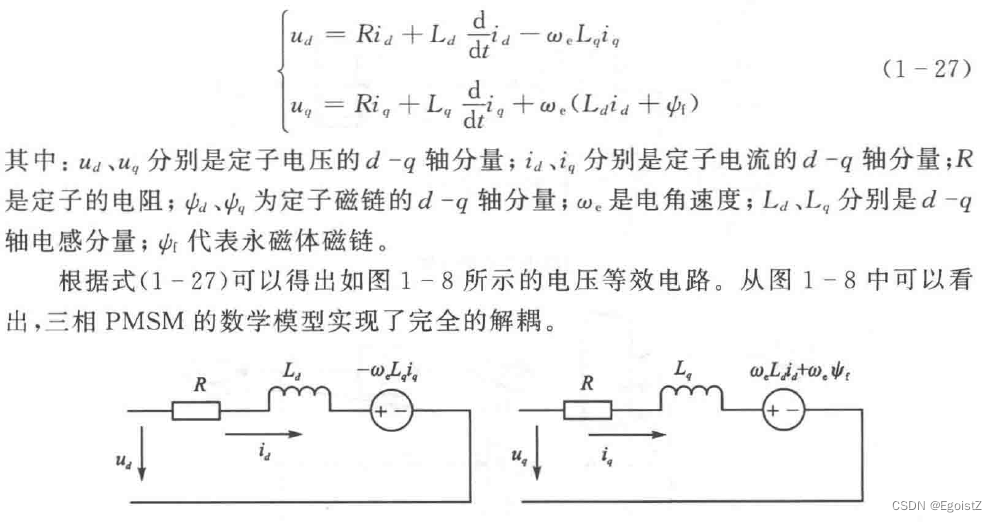
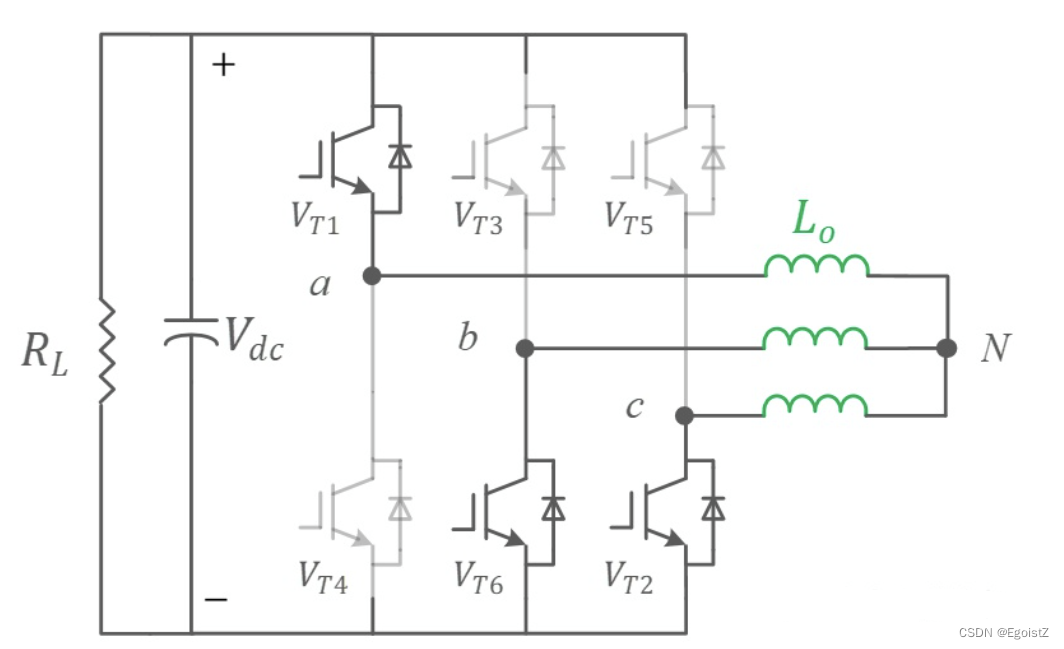
实际上我们根据以上推导就能看出,电压矢量和磁链相切。 因此,如果我们能通过控制形成圆形的合成电压矢量,则形成的磁链也是圆形的,即控制效果好。这一部分的控制就交由逆变器这个硬件来完成,软件上实现通过SVPWM的控制算法。控制对象实际上为磁链,而PWM控制对象为电压,因此SVPWM控制会更为精准。 这个位置再插一嘴PMSM的等效电路。基于DQ轴推导的: 通常的三相交流电是50Hz,频率无法改变,因此需要通过逆变器进行变频调速。
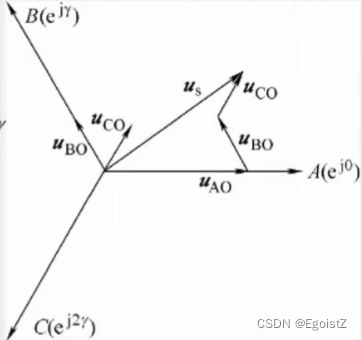
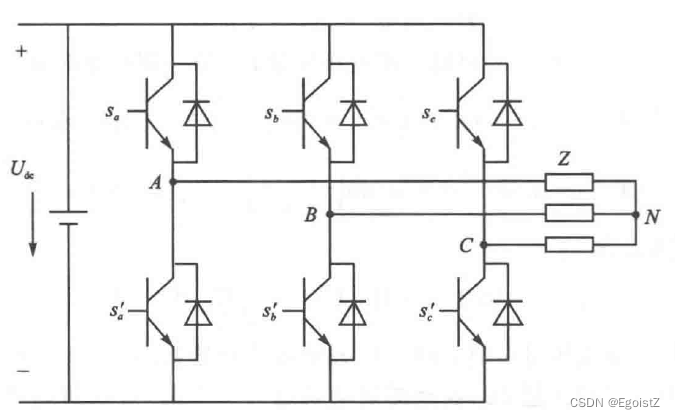
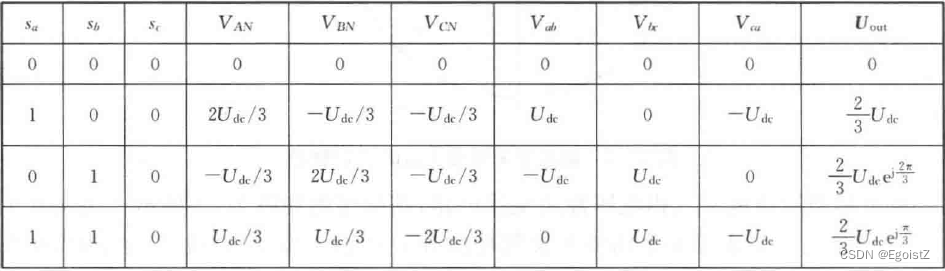
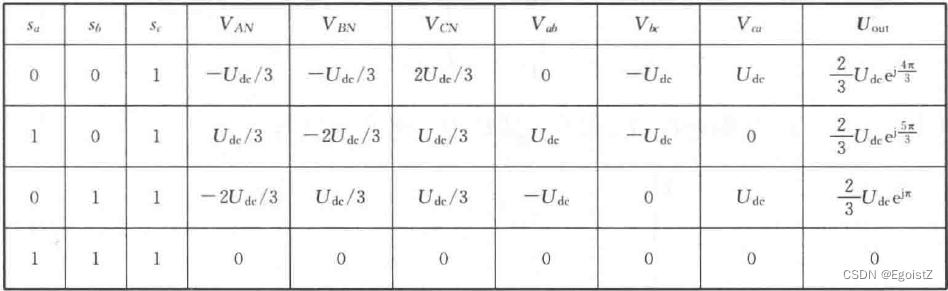
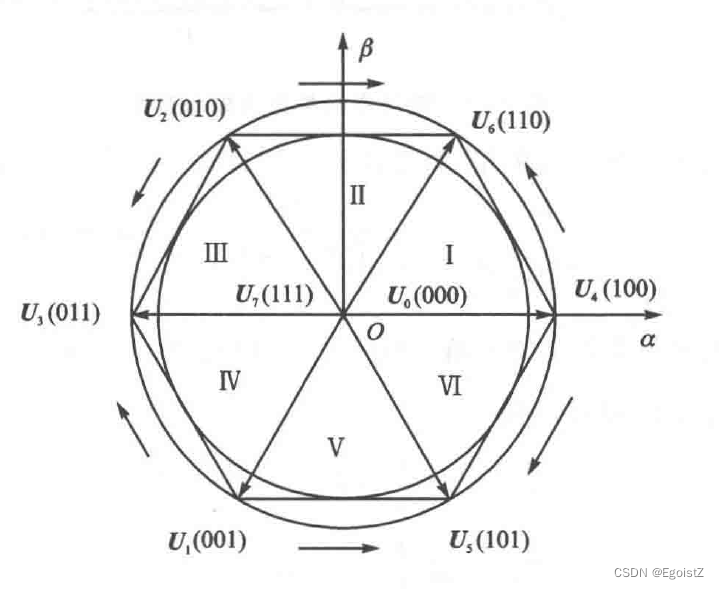
各开关状态导通的各相电压如表所示。以开关状态1,0,0为例,很容易就能推导出相应相的电压值。此处不再赘述。 首先,SVPWM所有的分析是建立在复数坐标轴( 我们的目的是要将这三个标量加上其120度的相位差合成一个矢量。因此为了方便,我们可以建立一个复数坐标系(实际上也是 稍微欧拉变换一下我们就可以得到这个 我们由各相电压标量的输入,可以知道: 简单地代入 再欧拉一下 最终的这个玩意就是合成的电压矢量的表达式。这个合成电压和相电压幅值、电角度有关,也可以看出运动轨迹为一个圆形。在之前提到的内容中,实际上就是要控制这个向量轨迹达到比较完美的圆,使得电机的运行性能最佳。 下面这个图能比较好的描述其关系,助于理解。这里旋转矢量的合成过程有一个控制周期,控制周期对应着一个时间间隔,在这个时间间隔内通过PWM控制MOS导通和关闭来合成这个时刻的向量。因此虽然GIF里看起来是连续的,但实际上这个合成过程是一个时间间隔极短的离散过程。控制频率越高,合成的矢量越连续完整。因此SVPWM的调制对于开关有比较高的要求。这也是为什么IGBT作为开关元件很贵的原因。
实际上对于各开关状态是有这样一组公式描述的:
但是这个公式的推导未知,因此看看就好。和第二节的表结合在一起看,我们很容易就能推导出各个Mos导通时的 这个公式将复平面分成了6个扇区。
SVPWM算法的理论基础是平均值等效原理,即在一个开关周期T白内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。这一点和PWM是一样的。但不同的是PWM只关心直流电机外部的电压,而SVPWM深入到了电机内部的矢量合成。 SVPWM算法的输入是参考电压向量,输出即是跟踪这个参考电压向量的电压 定义PWM开关周期 中间推导过程不一一细表,但是对于参考电压矢量在I扇区为例,其合成为4、6、0、7四个开关状态决定的,最终结论为:
以这一个扇区为例就计算出了各个开关的导通时间。 接下来就是如何产生实际的脉宽调制波形。目前.SVPWM 算法的合成方式中主要包括两种:基于软件模式的合成(七段式SVPWM 算法)和基于硬件模式的合成(五段式SVPWM 算法) 。在SVPWM 方案中,零矢量的选择是最具灵活性的,适当选择零矢量,可最大限度地减少开关次数,尽可能避免开关器件在负载电流较大时的开关动作,最大限度地减少开关损耗。对于七段式SVPWM 算法而言,将基本矢量作用顺序的分配原则选定为: 在每次开关状态转换时,只改变其中一相的开关状态,并且对零矢量在时间上进行平均分配,以便产生的PWM 对称,从而有效地降低PWM 的谐波分量。 对于七段式SVPWM 算法而言,PWM 波形对称,且谐波含量较小。但是每个开关周期有6 次开关切换。为了进一步减少开关次数,可以采用基于硬件模式的合成方式(五段式SVPWM 算法),该方法采用每相开关器件在每个扇区状态维持不变的序列安排下,使得每个开关周期只有3 次开关切换,但是会增大电流的谐波含量。 还有一个扇区判断和零和非零矢量作用时间计算的部分。等实际用到了再补充。 注意1.154这个值 = SVPWM合成的最大圆形磁场 / SPWM和成的最大圆形磁场。这使其直流母线电压利用率更高。 |
【本文地址】
今日新闻 |
推荐新闻 |