图像轮廓特征、性质 、面积、周长、边界矩形、方向、极点 |
您所在的位置:网站首页 › 一个one致敬韩寒yg3 › 图像轮廓特征、性质 、面积、周长、边界矩形、方向、极点 |
图像轮廓特征、性质 、面积、周长、边界矩形、方向、极点
|
轮廓的近似方法
这是函数 cv2.findCountours() 的第三个参数。它到底代表什么意思呢? 上边我们已经提到轮廓是一个形状具有相同灰度值的边界。它会存贮形状边界上所有的 (x,y) 坐标。但是需要将所有的这些边界点都存储吗?这就是这个参数要告诉函数 cv2.findContours 的。 这个参数如果被设置为 cv2.CHAIN_APPROX_NONE,所有的边界点都会被存储。但是我们真的需要这么多点吗?例如,当我们找的边界是一条直线时。你用需要直线上所有的点来表示直线吗?不是的,我们只需要这条直线的两个端点而已。这就是 cv2.CHAIN_APPROX_SIMPLE 要做的。它会将轮廓上的冗余点都去掉,压缩轮廓,从而节省内存开支。 我们用下图中的矩形来演示这个技术。在轮廓列表中的每一个坐标上画一个蓝色圆圈。第一个图显示使用cv2.CHAIN_APPROX_NONE 的效果,一共 734 个点。第二个图是使用 cv2.CHAIN_APPROX_SIMPLE 的结果,只有 4 个点。看到他的威力了吧! 三、轮廓特征 查找轮廓的不同特征,例如面积,周长,重心,边界框等。轮廓相关函数 (1)图像矩图像的矩可以帮助我们计算图像的质心,面积等。函数 cv2.moments() 会将计算得到的矩以一个字典的形式返回。 根据这些矩的值,我们可以计算出对象的重心:
1 2 3 4 5 6 7 8 9 10 11 import cv2 import numpy as np img = cv2.imread('tower.jpg',0) ret,thresh = cv2.threshold(img,127,255,0) image, contours,hierarchy = cv2.findContours(thresh, 1, 2) cnt = contours[0] M = cv2.moments(cnt) print(M) 1 {'m00': 2.0, 'm10': 742.0, 'm01': 1502.0, 'm20': 275282.3333333333, 'm11': 557242.0, 'm02': 1128002.3333333333, 'm30': 102129993.0, 'm21': 206737032.33333334, 'm12': 418488865.6666667, 'm03': 847130253.0, 'mu20': 0.3333333333139308, 'mu11': 0.0, 'mu02': 0.3333333332557231, 'mu30': 1.4901161193847656e-08, 'mu21': 2.450542524456978e-08, 'mu12': 4.866160452365875e-08, 'mu03': 1.1920928955078125e-07, 'nu20': 0.0833333333284827, 'nu11': 0.0, 'nu02': 0.08333333331393078, 'nu30': 2.634178031930877e-09, 'nu21': 4.331988091573825e-09, 'nu12': 8.60223763552427e-09, 'nu03': 2.1073424255447017e-08} 1 2 3 4 cx = int(M['m10']/M['m00']) cy = int(M['m01']/M['m00']) print(cx,cy) 1 371 751 (2)轮廓面积 使用函数 cv2.contourArea() 计算使用(0 阶矩),M[‘m00’]。 (3) 轮廓周长也被称为弧长。可以使用函数 cv2.arcLength() 计算得到。这个函数的第二参数可以用来指定对象的形状是闭合的(True),还是打开的(一条曲线)。 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 import cv2 import numpy as np img = cv2.imread('opencv.jpg') imgray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) ret,thresh = cv2.threshold(imgray,127,255,0) image, contours,hierarchy = cv2.findContours(thresh, 1, 2) cnt = contours[0] # 计算面积 Area = cv2.contourArea(cnt) # 计算周长 perimeter = cv2.arcLength(cnt,True) print(Area) img = cv2.drawContours(img, contours, -1, (0,255,0), 3) cv_show(img,'img') 1 41.0 (4)轮廓近似将轮廓形状近似到另外一种由更少点组成的轮廓形状,新轮廓的点的数目由我们设定的准确度来决定。使用的Douglas-Peucker算法,你可以到维基百科获得更多此算法的细节。 为了帮助理解,假设我们要在一幅图像中查找一个矩形,但是由于图像的种种原因,我们不能得到一个完美的矩形,而是一个“坏形状”(如下图所示)。现在你就可以使用这个函数来近似这个形状()了。这个函数的第二个参数叫epsilon,它是从原始轮廓到近似轮廓的最大距离。它是一个准确度参数。选择一个好的 epsilon 对于得到满意结果非常重要。 下边,第二幅图中的绿线是当 epsilon = 10% 时得到的近似轮廓,第三幅图是当 epsilon = 1% 时得到的近似轮廓。第三个参数设定弧线是否闭合。
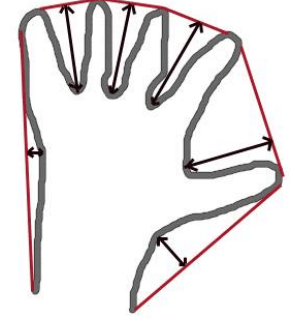
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 import cv2 import numpy as np img = cv2.imread('contours.jpg') imgray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) ret,thresh = cv2.threshold(imgray,127,255,0) image, contours,hierarchy = cv2.findContours(thresh, 1, 2) cnt = contours[0] epsilon = 0.1*cv2.arcLength(cnt,True) approx = cv2.approxPolyDP(cnt,epsilon,True) contours[0] = cnt img = cv2.drawContours(img, contours, -1, (0,255,0), 3) cv_show(img,'img') (5)凸包凸包与轮廓近似相似,但不同,虽然有些情况下它们给出的结果是一样的。 函数 cv2.convexHull() 可以用来检测一个曲线是否具有凸性缺陷,并能纠正缺陷。一般来说,凸性曲线总是凸出来的,至少是平的。如果有地方凹进去了就被叫做凸性缺陷。例如下图中的手。红色曲线显示了手的凸包,凸性缺陷被双箭头标出来了。
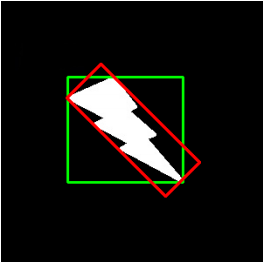
hull = cv2.convexHull(points[, hull[, clockwise[, returnPoints]] points 我们要传入的轮廓hull 输出,通常不需要clockwise 方向标志。如果设置为 True,输出的凸包是顺时针方向的。否则为逆时针方向。returnPoints 默认值为 True。它会返回凸包上点的坐标。如果设置为 False,就会返回与凸包点对应的轮廓上的点。1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 import cv2 import numpy as np img = cv2.imread('contours.jpg') imgray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) ret,thresh = cv2.threshold(imgray,127,255,0) image, contours,hierarchy = cv2.findContours(thresh, 1, 2) cnt = contours[0] # 要获得上图的凸包,下面的命令就够了 hull = cv2.convexHull(cnt) img = cv2.drawContours(img, contours, -1, (0,255,0), 3) cv_show(img,'img') 但是如果你想获得凸性缺陷,需要把 returnPoints 设置为 False。上面的矩形为例,首先我们找到他的轮廓 cnt。现在我把 returnPoints 设置为 True 查找凸包,我得到下列值: [[[234 202]], [[ 51 202]], [[ 51 79]], [[234 79]]],其实就是矩形的个角点。 现在把 returnPoints 设置为 False,我得到的结果是[[129],[ 67],[ 0],[142]] 他们是轮廓点的索引。例如:cnt[129] = [[234, 202]],这与前面我们得到结果的第一个值是一样的。在凸检验中你我们还会遇到这些。 (6)凸性检测函数 cv2.isContourConvex() 可以可以用来检测一个曲线是不是凸的。它只能返回 True 或 False。没什么大不了的。 1 k = cv2.isContourConvex(cnt) (7)边界矩形当得到对象轮廓后,可用boundingRect()得到包覆此轮廓的最小正矩形,minAreaRect()得到包覆轮廓的最小斜矩形。 有两类边界矩形。 直边界矩形 一个直矩形(就是没有旋转的矩形)。它不会考虑对象是否旋转。所以边界矩形的面积不是最小的。可以使用函数 cv2.boundingRect() 查找得到。(x,y)为矩形左上角的坐标,(w,h)是矩形的宽和高。 1 2 x,y,w,h = cv2.boundingRect(cnt) img = cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2) 旋转的边界矩形 这个边界矩形是面积最小的,因为它考虑了对象的旋转。用到的函数为 cv2.minAreaRect()。返回的是一个 Box2D 结构,其中包含矩形左上角角点的坐标(x,y),矩形的宽和高(w,h),以及旋转角度。但是要绘制这个矩形需要矩形的 4 个角点,可以通过函数 cv2.boxPoints() 获得。1 2 3 4 5 6 rect = cv2.minAreaRect(cnt) # cv2.boxPoints(rect) for OpenCV 3.x box = cv2.boxPoints(rect) box = np.int0(box) img = cv2.drawContours(img,[box],0,(0,0,255),2) 把这两中边界矩形显示在下图中,其中绿色的为直矩形,红的为旋转矩形。
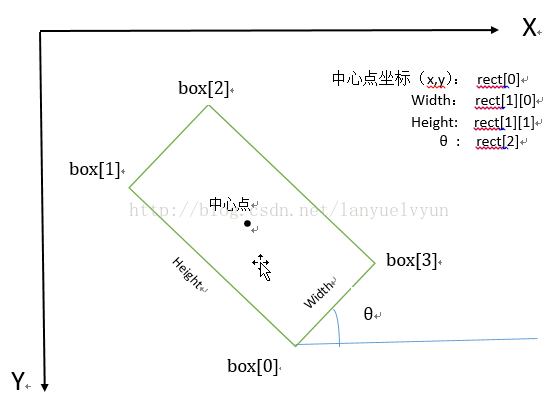
该函数计算并返回指定点集的最小区域边界斜矩形。 points:输入信息,可以为包含点的容器(vector)或是Mat。 返回包覆输入信息的最小斜矩形,是一个Box2D结构rect:(最小外接矩形的中心(x,y),(宽度,高度),旋转角度),但是要绘制这个矩形,我们需要矩形的4个顶点坐标box, 通过函数 cv2.cv.BoxPoints() 获得,返回形式[ [x0,y0], [x1,y1], [x2,y2], [x3,y3] ]。得到的最小外接矩形的4个顶点顺序、中心坐标、宽度、高度、旋转角度(是度数形式,不是弧度数)的对应关系如下:
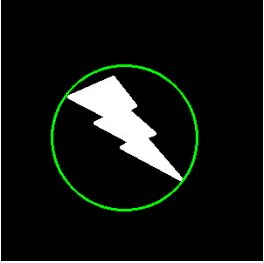
图片来自博客:https://blog.csdn.net/duiwangxiaomi/article/details/92565308 旋转角度θ是水平轴(x轴)逆时针旋转,与碰到的矩形的第一条边的夹角。并且这个边的边长是width,另一条边边长是height。也就是说,在这里,width与height不是按照长短来定义的。 在opencv中,坐标系原点在左上角,相对于x轴,逆时针旋转角度为负,顺时针旋转角度为正。所以,θ∈(-90度,0]。 (2)cv2.minAreaRect()内部实现算法分析opencv里求最小外接矩形的函数是cv2.minAreaRect() minAreaRect()内部实现思路: 先求轮廓点集的凸包convex hull 关于凸包convex hull:opencv里求凸包的函数是convexHull(),其用的算法是Sklansky算法其他的凸包算法:Learn OpenCV之Convex Hull,凸包问题的五种解法,数学:凸包算法详解再求凸包的最小外接矩形 几何定理:多边形的最小外接矩形的一条边必然与多边形的其中一条边共线 旋转卡尺算法Rotating calipers 根据上面的定理,只需要枚举多边形的边,做外接矩形,比较外接矩的面积,选最小的那个。(因为是矩形,所以枚举旋转超过90度结束,之后的枚举都是重复的外接矩形) (3)最小外接矩形的另一种实现思路虽然最小外接矩形minAreaRect在很大的程度上可以代表物体的方向性,即,oriented bounding box。 但是,还有一种OBB的实现思路,来源https://www.cnblogs.com/jsxyhelu/p/9345590.html PCA主成分分析得到物体的主方向旋转物体的主方向,使其正交与坐标系,此时再求旋转后的up-right bounding box求得bbox后,再旋转回去,此时的bbox变为了obb (8)最小外接圆函数 cv2.minEnclosingCircle() 可以帮我们找到一个对象的外切圆。它是所有能够包括对象的圆中面积最小的一个。 1 2 3 4 (x,y),radius = cv2.minEnclosingCircle(cnt) center = (int(x),int(y)) radius = int(radius) img = cv2.circle(img,center,radius,(0,255,0),2)
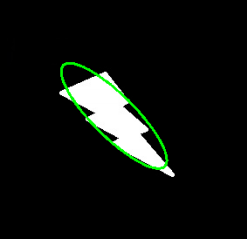
使用的函数为 cv2.ellipse(),返回值其实就是旋转边界矩形的内切圆。 1 2 ellipse = cv2.fitEllipse(cnt) im = cv2.ellipse(im,ellipse,(0,255,0),2)
我们可以根据一组点拟合出一条直线,同样我们也可以为图像中的白色点拟合出一条直线。 1 2 3 4 5 6 rows,cols = img.shape[:2] [vx,vy,x,y] = cv2.fitLine(cnt, cv2.DIST_L2,0,0.01,0.01) lefty = int((-x*vy/vx) + y) righty = int(((cols-x)*vy/vx)+y) img = cv2.line(img,(cols-1,righty),(0,lefty),(0,255,0),2) [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-NXhzl8Ra-1591843847991)(attachment:image.png)] 四、轮廓性质 (1)长宽比边界矩形的宽高比:
1 2 x,y,w,h = cv2.boundingRect(cnt) aspect_ratio = float(w)/h (2)轮廓面积与边界矩形面积的比。
1 2 3 4 area = cv2.contourArea(cnt) x,y,w,h = cv2.boundingRect(cnt) rect_area = w*h extent = float(area)/rect_area (3)Solidity轮廓面积与凸包面积的比。
1 2 3 4 area = cv2.contourArea(cnt) hull = cv2.convexHull(cnt) hull_area = cv2.contourArea(hull) solidity = float(area)/hull_area (4)Equivalent Diameter与轮廓面积相等的圆形的直径
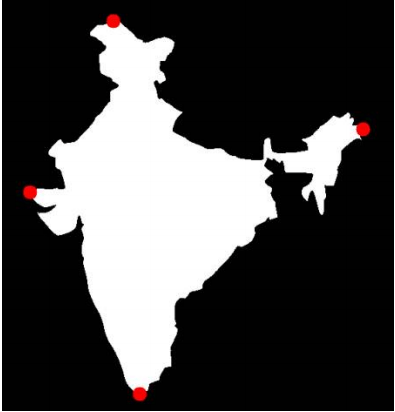
1 2 area = cv2.contourArea(cnt) equi_diameter = np.sqrt(4*area/np.pi) (5)方向对象的方向,下面的方法还会返回长轴和短轴的长度 1 (x,y),(MA,ma),angle = cv2.fitEllipse(cnt) (6)掩模和像素点有时我们需要构成对象的所有像素点,我们可以这样做: 第一种方法使用了 Numpy 函数,第二种使用了 OpenCV 函数。结果相同,但还是有点不同。Numpy 给出的坐标是(row,colum)形式的。 而 OpenCV 给出的格式是(x,y)形式的。所以这两个结果基本是可以互换的。row=x,colunm=y。 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 mask = np.zeros(imgray.shape,np.uint8) # 这里一定要使用参数-1, 绘制填充的的轮廓 cv2.drawContours(mask,[cnt],0,255,-1) #Returns a tuple of arrays, one for each dimension of a, #containing the indices of the non-zero elements in that dimension. #The result of this is always a 2-D array, with a row for #each non-zero element. #To group the indices by element, rather than dimension, use: #transpose(nonzero(a)) #>>> x = np.eye(3) #>>> x #array([[ 1., 0., 0.], # [ 0., 1., 0.], # [ 0., 0., 1.]]) #>>> np.nonzero(x) #(array([0, 1, 2]), array([0, 1, 2])) #>>> x[np.nonzero(x)] #array([ 1., 1., 1.]) #>>> np.transpose(np.nonzero(x)) #array([[0, 0], # [1, 1], # [2, 2]]) pixelpoints = np.transpose(np.nonzero(mask)) #pixelpoints = cv2.findNonZero(mask) (7)最大值和最小值及它们的位置我们可以使用掩模图像得到这些参数。 1 min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(imgray,mask = mask) (8)平均颜色及平均灰度我们也可以使用相同的掩模求一个对象的平均颜色或平均灰度 1 mean_val = cv2.mean(im,mask = mask) (8)极点一个对象最上面,最下面,最左边,最右边的点。 1 2 3 4 leftmost = tuple(cnt[cnt[:,:,0].argmin()][0]) rightmost = tuple(cnt[cnt[:,:,0].argmax()][0]) topmost = tuple(cnt[cnt[:,:,1].argmin()][0]) bottommost = tuple(cnt[cnt[:,:,1].argmax()][0])
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 import cv2 import numpy as np img = cv2.imread('contours.jpg') imgray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) ret,thresh = cv2.threshold(imgray,127,255,0) image, contours,hierarchy = cv2.findContours(thresh, 1, 2) cnt = contours[0] # 计算面积 area = cv2.contourArea(cnt) # 计算周长 perimeter = cv2.arcLength(cnt,True) # 计算长宽比 x,y,w,h = cv2.boundingRect(cnt) aspect_ratio = float(w)/h # 轮廓面积与边界矩形面积的比。 rect_area = w*h extent = float(area)/rect_area # 轮廓面积与凸包面积的比。 hull = cv2.convexHull(cnt) hull_area = cv2.contourArea(hull) solidity = float(area)/hull_area # 与轮廓面积相等的圆形的直径 equi_diameter = np.sqrt(4*area/np.pi) # 对象的方向,下面的方法还会返回长轴和短轴的长度 (x,y),(MA,ma),angle = cv2.fitEllipse(cnt) print(area) print(perimeter) print(aspect_ratio) print(extent) print(solidity) print(equi_diameter) print(angle) img = cv2.drawContours(img, contours, -1, (0,255,0), 3) cv_show(img,'img') 1 2 3 4 5 6 7 22158.0 972.048770070076 1.4728682170542635 0.9040391676866585 0.9159415497178761 167.96559716871113 84.16471099853516
link |



【本文地址】
今日新闻 |
推荐新闻 |