yolov5分割 |
您所在的位置:网站首页 › yolo实例分割 › yolov5分割 |
yolov5分割
|
点击上方“CVer”,选择加"星标"置顶 重磅干货,第一时间送达 本文转载自:AI深度学习视线
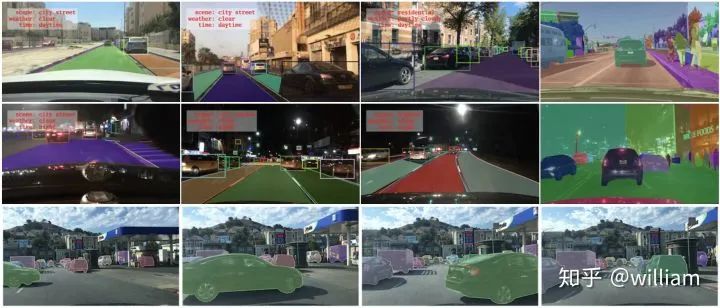
准备数据集 环境配置 配置文件修改 训练 推理 转Tensorrt 1 准备数据集 1.1 BDD数据集 BDD100K是最大的开放式驾驶视频数据集之一,其中包含10万个视频和10个任务,目的是方便评估自动驾驶图像识别算法的的进展。每个高分辨率视频一共40秒。该数据集包括超过1000个小时的驾驶数据,总共超过1亿帧。这些视频带有GPU / IMU数据以获取轨迹信息。该数据集具有地理,环境和天气多样性,从而能让模型能够识别多种场景,具备更多的泛化能力。这些丰富的户外场景和复杂的车辆运动使感知任务更具挑战性。该数据集上的任务包括图像标记,车道检测,可驾驶区域分割,道路对象检测,语义分割,实例分割,多对象检测跟踪,多对象分割跟踪,领域自适应和模仿学习。我们可以在BDD100K数据网站上下载数据。
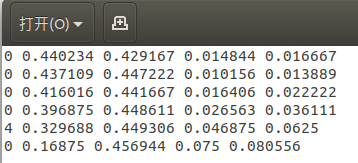
道路对象类别包括以下几类: [ "bike", "bus", "car", "motor", "person", "rider", "traffic light", "traffic sign", "train", "truck"]1.2 YOLO数据格式 每个图片文件.jpg,都有同一命名的标签文件.txt。 标签文件中每个对象独占一行,格式为。 其中: -表示对象的类别序号:从0 到 (classes-1) -参照图片宽度和高度的相对比例(浮点数值),从0.0到1.0 例如: = / 或 = / 注意:是矩形的中心,而不是左上角位置。 如下图所示:
YOLO V5的标签文件和图像文件应位于同一目录下。 1.3 BDD数据转YOLO格式 Berkerley 提供了Bdd100k数据集的标签查看及标签格式转化工具。由于没有直接从bdd100k转换成YOLO的工具,因此我们首先得使用将bdd100k的标签转换为coco格式,然后再将coco格式转换为yolo格式。bdd to coco 我的目的是识别包括不同颜色交通灯在内的所有交通对象,因此我们需要对原版的bdd2coco.py进行一些修改,以获取交通灯颜色并产生新的类别。 这是修改完的核心代码: for label in i['labels']: annotation = dict() category=label['category'] if (category == "traffic light"): color = label['attributes']['trafficLightColor'] category = "tl_" + color if category in id_dict.keys(): empty_image = False annotation["iscrowd"] = 0 annotation["image_id"] = image['id'] x1 = label['box2d']['x1'] y1 = label['box2d']['y1'] x2 = label['box2d']['x2'] y2 = label['box2d']['y2'] annotation['bbox'] = [x1, y1, x2-x1, y2-y1] annotation['area'] = float((x2 - x1) * (y2 - y1)) annotation['category_id'] = id_dict[category] annotation['ignore'] = 0 annotation['id'] = label['id'] annotation['segmentation'] = [[x1, y1, x1, y2, x2, y2, x2, y1]] annotations.append(annotation)在完成bdd100k格式到yolo格式的转换后,会获得bdd100k_labels_images_det_coco_train.json和bdd100k_labels_images_det_coco_val.json两个文件。 Coco to yolo 在完成先前的转换之后,我们需要将训练集和验证集的coco格式标签转换为yolo格式。注意需要分别指定训练集和验证集图片位置,对应的coco标签文件位置,及生成yolo标签的目标位置。 config_train ={ "datasets": "COCO", "img_path": "bdd100k_images/bdd100k/images/100k/train", "label": "labels/bdd100k_labels_images_det_coco_train.json", "img_type": ".jpg", "manipast_path": "./", "output_path": "labels/trains/", "cls_list": "bdd100k.names", } config_valid ={ "datasets": "COCO", "img_path": "bdd100k_images/bdd100k/images/100k/val", "label": "labels/bdd100k_labels_images_det_coco_val.json", "img_type": ".jpg", "manipast_path": "./", "output_path": "labels/valids/", "cls_list": "bdd100k.names", }除此之外,我们还得将所有的类别写入bdd100k.names文件。 personridercarbustruckbikemotortl_greentl_redtl_yellowtl_nonetraffic signtraintl_green运行Bdd_preprocessing中的完整代码可以完成Bdd100k格式标签到YOLO标签格式的转换。 Bdd2coco以及coco2yolo的详细说明可以参看bdd100k代码库和convert2Yolo代码库。 2 环境配置 2.1 官方代码 https://github.com/ultralytics/yolov5/tree/v3.0
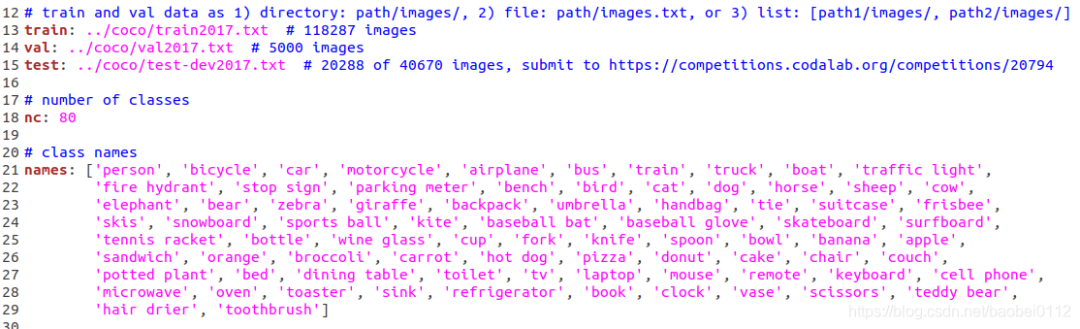
由于后面转tensorrt版本支持yolov5到3.0版本,所以以3.0版本进行实验。 环境配置可通过下面命令进行一键配置。 # pip install -r requirements.txt# base ----------------------------------------Cythonmatplotlib>=3.2.2numpy>=1.18.5opencv-python>=4.1.2pillowPyYAML>=5.3scipy>=1.4.1tensorboard>=2.2torch>=1.6.0torchvision>=0.7.0tqdm>=4.41.0# coco ----------------------------------------# pycocotools>=2.0# export --------------------------------------# packaging # for coremltools# coremltools==4.0b4# onnx>=1.7.0# scikit-learn==0.19.2 # for coreml quantization# extras --------------------------------------# thop # FLOPS computation# seaborn # plotting3 配置文件修改3.1 修改 ./data/coco.yaml 修改./data/coco.yaml--》存为bdd.yaml
修改内容: (1)train/val/test 路径 其中的txt内容均为各集合图像实际绝对路径。 (2)nc:number class 类别数量,BDD数据类别为10 (3)names:前面bdd数据集介绍时候已经列出 3.2 修改 ./model/yolov5.yaml
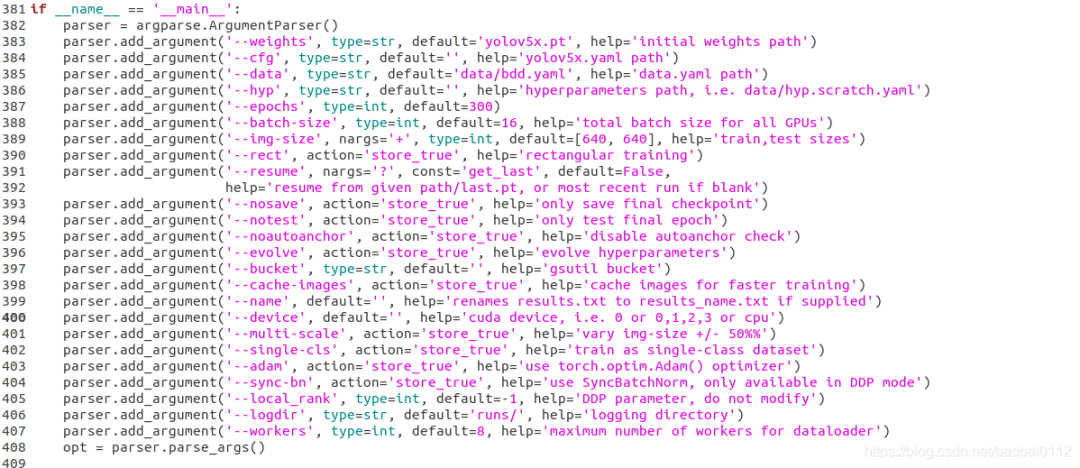
修改:nc为BDD数据类别数:10 3.3 修改./train.py
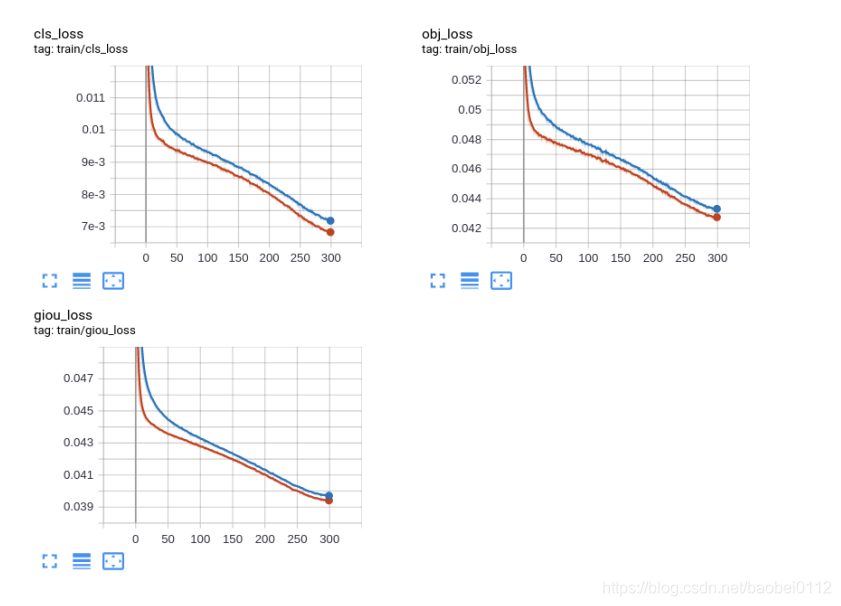
修改: (1)--weights,这里s/m/l/x四个型号可以选择 (2)--cfg,这里s/m/l/x四个型号可以选择 (3)--data,选择根据coco.yaml修改后的bdd.yaml (4)--batch-size 和 --img-size 可以再这里修改也可以默认不动,再训练命令行里设定 4 训练预训练模型 python train.py --img 640 --batch 32 --epochs 300 --data './data/bdd.yaml' --cfg ./models/custom_yolov5x.yaml --weights "./weights/yolov5x.pt" --name yolov5x_bdd_prew --cache从头训练 python train.py --img 640 --batch 32 --epochs 300 --data './data/bdd.yaml' --cfg ./models/custom_yolov5x.yaml --weights "" --name yolov5x_bdd --cachetrain_loss:
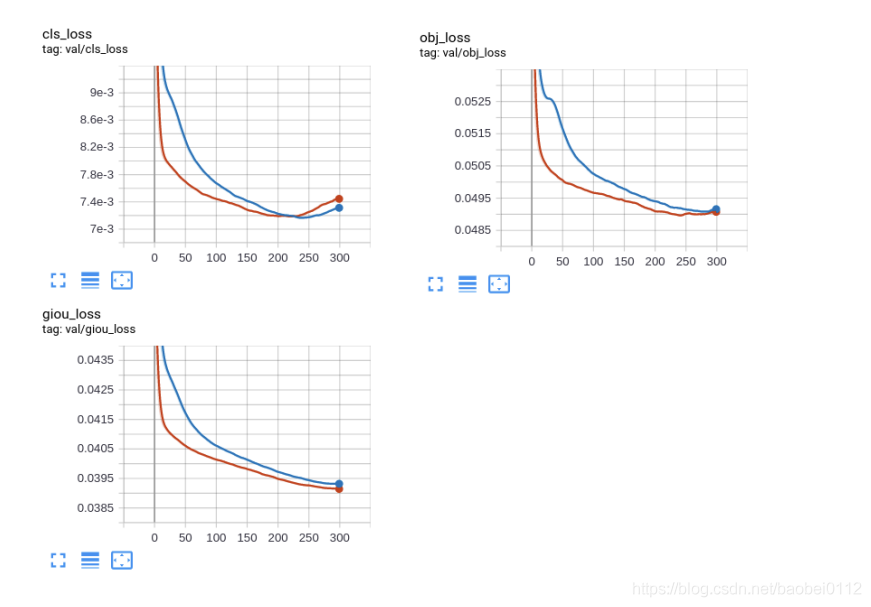
val_loss:
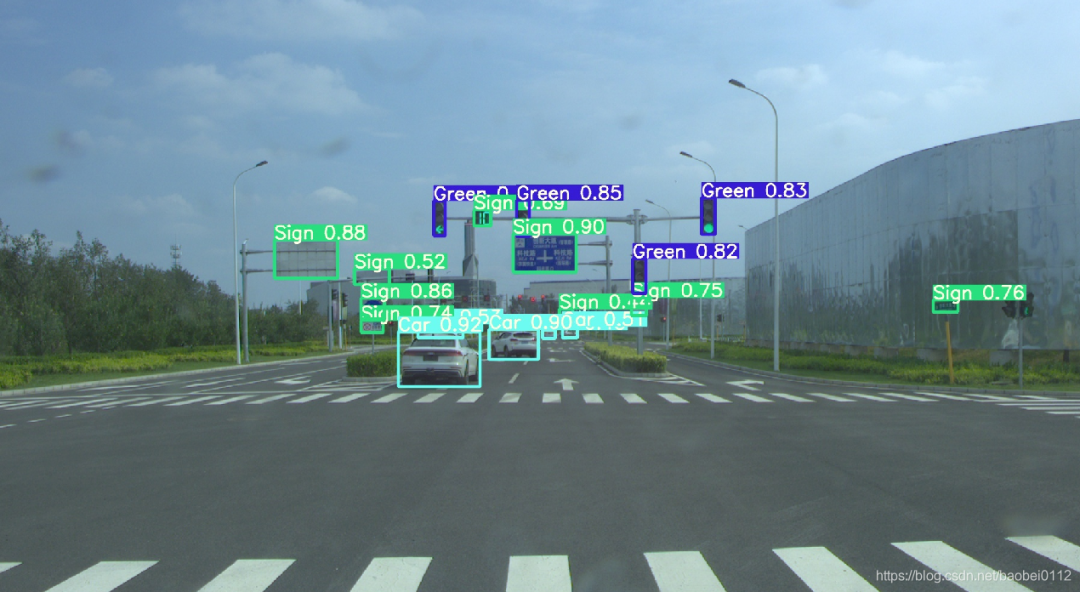
5 推断可选参数: — weights: 训练权重的路径 — source:推理目标的路径,可以是图片,视频,网络摄像头等 — source:推理结果的输出路径 — img-size:推理图片的大小 — conf-thres:对象置信阈值,默认0.4 — iou-thres:NMS的IOU阈值,可以根据实际对象的重叠度调节,默认0.5 — device: 选择使用CUDA或者CPU — view-img:显示所有推理结果 — save-txt:将每一帧的推理结果及边界框的位置,存入*.txt文件 — classes:类别过滤,意思是只推理目标类别 — agnostic-nms:使用agnostic-nms NMS python detect.py --source 0 # webcam file.jpg # image file.mp4 # video path/ # directory path/*.jpg # glob rtsp://170.93.143.139/rtplive/470011e600ef003a004ee33696235daa # rtsp stream rtmp://192.168.1.105/live/test # rtmp stream http://112.50.243.8/PLTV/88888888/224/3221225900/1.m3u8 # http stream
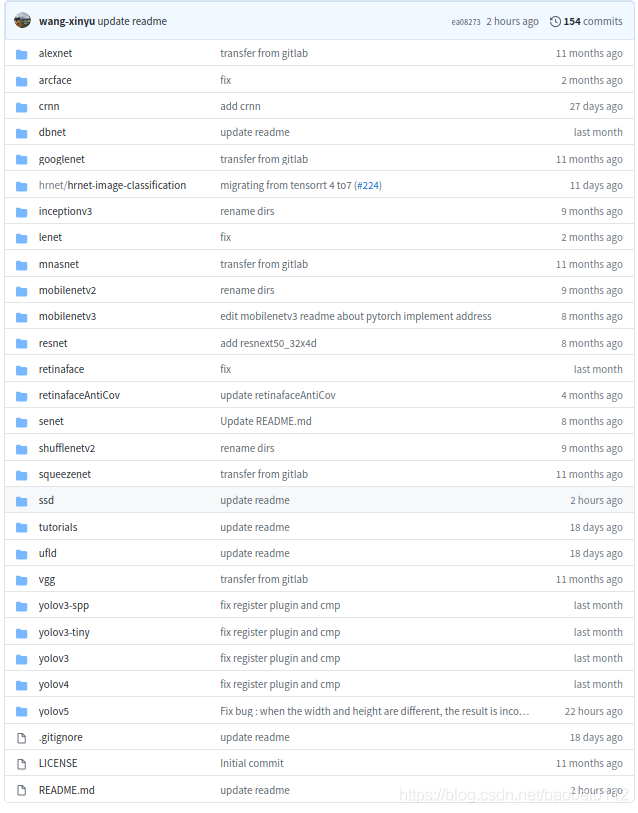
5 转Tensorrt6.1 工程配置 https://github.com/wang-xinyu/tensorrtx/tree/master/yolov5,该项目提供了一大批常见模型的转Tensorrt方法。
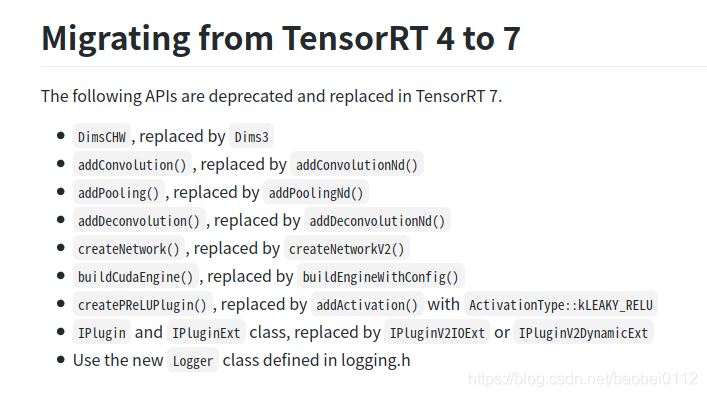
环境要求: GTX1080 / Ubuntu16.04 / cuda10.0 / cudnn7.6.5 / tensorrt7.0.0 / nvinfer7.0.0 / opencv3.3 高版本tensorrt7的变化如下:
6.2 生成转tensorrt的中间文件 yolov5.wts 拷贝 ./tensorrt/yolov5/gen_wts.py文件到./yolov5 工程下,修改其中加载模型路径,执行该python文件,得到yolov5.wts,并将其拷贝回 ./tensorrt/yolov5/下。 1. generate yolov5s.wts from pytorch with yolov5s.ptgit clone https://github.com/wang-xinyu/tensorrtx.gitgit clone https://github.com/ultralytics/yolov5.git// download its weights 'yolov5s.pt'// copy tensorrtx/yolov5/gen_wts.py into ultralytics/yolov5// ensure the file name is yolov5s.pt and yolov5s.wts in gen_wts.py// go to ultralytics/yolov5python gen_wts.py// a file 'yolov5s.wts' will be generated.6.3 编译yolov5并生成tensorrt模型yolov5.engine 编译之前需要修改: (1)选模型
(2)CMakeLists.txt 如果tensorrt是通过tar包解压安装的,还需要在CMakeList.txt中对tensorrt路径进行指定,不然会报错找不到nvinfer
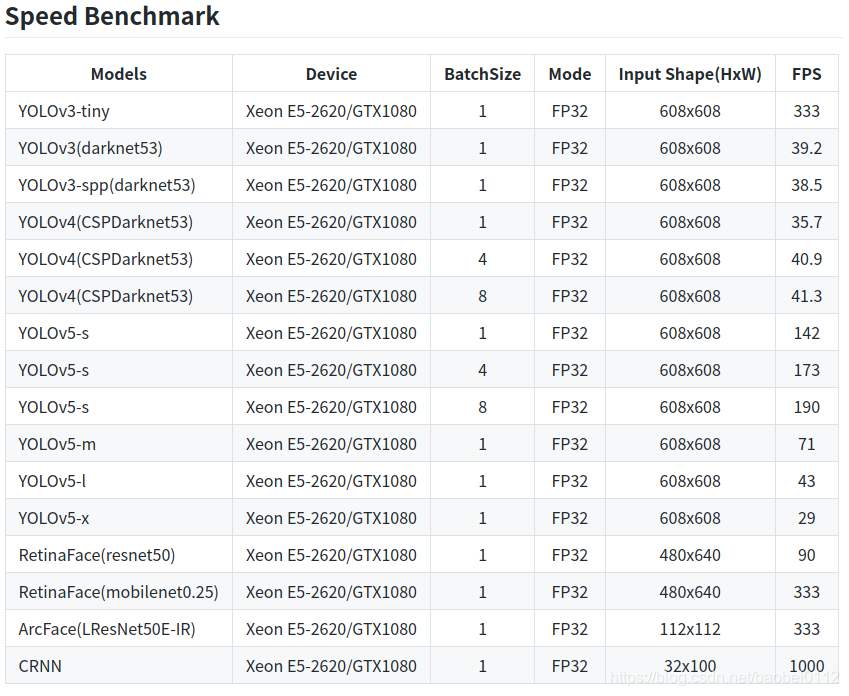
(3)另外,如果系统是Ubuntu18.04的话还会存在opencv的问题,找不到libpng12.so和libjasper.so. 这个问题可通过https://blog.csdn.net/baobei0112/article/details/108991915 该博客内容找到答案。 (4)./tensorrt/yolov5/下新建个samples文件夹,把需要测试的图片放进去。 做好准备工作,下面就可以进行YOLOV5的engine编译工作。 build tensorrtx/yolov5 and run// put yolov5s.wts into tensorrtx/yolov5// go to tensorrtx/yolov5// ensure the macro NET in yolov5.cpp is smkdir buildcd buildcmake ..makesudo ./yolov5 -s // serialize model to plan file i.e. 'yolov5s.engine'sudo ./yolov5 -d ../samples // deserialize plan file and run inference, the images in samples will be processed.6.4 Tensorrt各yolo模型对比
论文下载 在CVer公众号后台回复:YOLO,即可下载YOLO系列资料 后台回复:目标检测二十年,即可下载39页的目标检测最全综述,共计411篇参考文献。 下载2 后台回复:CVPR2020,即可下载代码开源的论文合集 后台回复:ECCV2020,即可下载代码开源的论文合集 后台回复:YOLO,即可下载YOLOv4论文和代码 重磅!CVer-目标检测 微信交流群已成立 扫码添加CVer助手,可申请加入CVer-目标检测 微信交流群,目前已汇集4000人!涵盖2D/3D目标检测、小目标检测、遥感目标检测等。互相交流,一起进步! 同时也可申请加入CVer大群和细分方向技术群,细分方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch和TensorFlow等群。 一定要备注:研究方向+地点+学校/公司+昵称(如目标检测+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群
▲长按加群
▲长按关注我们 麻烦给我一个在看 |








【本文地址】