基于Darknet的YOLOv4目标检测 |
您所在的位置:网站首页 › yolov4识别小目标 › 基于Darknet的YOLOv4目标检测 |
基于Darknet的YOLOv4目标检测
|
目录 一、Windows环境下的YOLOv4目标检测 1、环境配置 2、克隆或下载YOLOv4 3、Visual Studio2019配置YOLOv4项目 4、Visual Studio2019编译YOLOv4项目 5、YOLOv4权重文件下载 6、YOLOv4目标检测测试 7、使用YOLOv4训练自己的数据集 8、Anchor Box先验框聚类分析与修改 二、Linux环境下的YOLOv4目标检测 1、环境配置 2、YOLOv4下载和编译 3、测试图片 三、提高YOLOv4目标检测性能的技巧 1、YOLOv4训练前的改善技巧 2、YOLOv4训练后的改善技巧 一、Windows环境下的YOLOv4目标检测 1、环境配置环境准备:Win10、CUDA10.1、cuDNN7.65、Visual Studio 2019、OpenCV 3.4 (1)Visual Studio2019企业版安装 (2)NVIDIA驱动下载与安装 (3)下载并安装CUDA10.1,下载安装cuDNN7.65 对于cudnn直接将其解开压缩包,然后需要将bin,include,lib中的文件复制粘贴到cuda的文件夹下,比如:C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v10.1 (4)CUDA安装测试
(5)OpenCV安装 下载OpenCV3.4;运行exe(其实是解压),将压缩包解压到相应目录,如: C:\Program Files (x86)\opencv;在系统变量 Path 的末尾添加:C:\Program Files (x86)\opencv\build\x64\vc15\bin 2、克隆或下载YOLOv4 YOLOv4网址:https://github.com/AlexeyAB/darknet如果安装了Git软件,可直接克隆项目到本地:git clone https://github.com/AlexeyAB/darknet在GitHub上直接下载,并将解压后的darknet-master文件夹改名为darknet 3、Visual Studio2019配置YOLOv4项目(1)复制opencv文件 在文件夹C:\Program Files (x86)\opencv\build\x64\vc15\bin的两个dll文件:opencv_ffffmpeg340_64.dll和opencv_world340.dll复制到D:\darknet\build\darknet\x64 (2)Visual Studio 2019项目配置 用visual studio2019打开darknet.sln文件
然后需要重启电脑。 打开darknet.sln项目,对其进行配置:项目 ->属性;注意应选release和x64
(3)接下来几个步骤比较关键 注意检查Windows SDK版本
添加opencv3.4的包含目录和库目录(按照自己的opencv3.4的路径)包含目录: C:\Program Files (x86)\opencv\build\include C:\Program Files (x86)\opencv\build\include\opencv C:\Program Files (x86)\opencv\build\include\opencv2
添加附加依赖项(按照自己的opencv3.4的路径):C:\Program Files (x86)\opencv\build\x64\vc14\lib\opencv_world340.lib
点击“重新生成解决方案”。可能有下述错误:严重性 代码 说明 项目 文件 行 禁止显示状态 错误 MSB4019 找不到导入的项目“C:\Program Files(x86)\Microsoft Visual Studio\2019\Community\MSBuild\Microsoft\VC\v160\BuildCustomizations\CUDA 10.0.props”。请确认 Import 声明“C:\Program Files (x86)\Microsoft Visual Studio\2019\Community\MSBuild\Microsoft\VC\v160\BuildCustomizations\CUDA 10.0.props”中的表达式正确,且文件位于磁盘上。 darknet D:\darknet\build\darknet\darknet.vcxproj 解决方法:将D:\darknet\build\darknet\darknet.vcxproj中版本号进行修改如下
仍然有错误时的解决方法: 将NVIDIA CUDA的安装程序(.exe文件)数据解压到一个指定文件夹中(最好是放在一个文件夹,解压后会出现很多文件,这样方便查找)
yolov4.weight下载,拷贝权重文件到D:\darknet\build\darknet\x64 6、YOLOv4目标检测测试(1)测试图片 在D:\darknet\build\darknet\x64\ 目录下执行: darknet.exe detector test cfg\coco.data cfg\yolov4.cfg yolov4.weights data\dog.jpg结果如下:
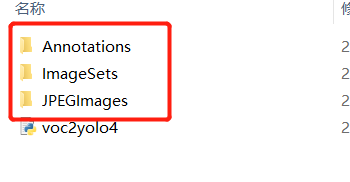
(2)测试视频 在D:\darknet\build\darknet\x64\ 目录下执行: darknet.exe detector demo cfg\coco.data cfg\yolov4.cfg yolov4.weights data\driving.mp4 7、使用YOLOv4训练自己的数据集(1)数据集准备 使用PASCAL VOC数据集的目录结构(建立文件夹层次为 D:\darknet\build\darknet\x64\VOCdevkit\ VOC2007):
JPEGImages放所有的训练和测试图片;Annotations放所有的xml标记文件 (2)训练集和测试集生成 在D:\darknet\build\darknet\x64\目录下执行:python genfiles.py 在VOCdevkit \ VOC2007目录下可以看到生成了文件夹labels ,同时在darknet下生成了两个文件2007_train.txt和2007_test.txt。2007_train.txt和2007_test.txt分别给出了训练图片文件和测试图片文件的列表,含有每个图片的路径和文件名。 另外,在VOCdevkit \ VOC2007\ImageSets\Main目录下生产了两个文件test.txt和train.txt,分别给出了训练图片文件和测试图片文件的列表,但只含有每个图片的文件名(不含路径和扩展名)。labels下的文件是images文件夹下每一个图像的yolo格式的标注文件,这是由annotations的xml标注文件转换来的。 最终训练只需要:2007_train.txt,2007_test.txt,labels下的标注文件和 VOCdevkit\VOC2007\JPEGImages下的图像文件。 生成YOLO格式的txt标记文件内容如下:
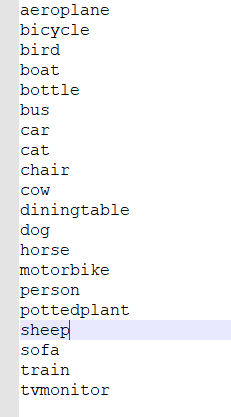
genfiles.py文件如下: import xml.etree.ElementTree as ET import pickle import os from os import listdir, getcwd from os.path import join import random classes=["aeroplane", "bicycle", "bird", "boat", "bottle", "bus", "car", "cat", "chair", "cow", "diningtable", "dog", "horse", "motorbike", "person", "pottedplant", "sheep", "sofa", "train", "tvmonitor"] def clear_hidden_files(path): dir_list = os.listdir(path) for i in dir_list: abspath = os.path.join(os.path.abspath(path), i) if os.path.isfile(abspath): if i.startswith("._"): os.remove(abspath) else: clear_hidden_files(abspath) def convert(size, box): dw = 1./size[0] dh = 1./size[1] x = (box[0] + box[1])/2.0 y = (box[2] + box[3])/2.0 w = box[1] - box[0] h = box[3] - box[2] x = x*dw w = w*dw y = y*dh h = h*dh return (x,y,w,h) def convert_annotation(image_id): in_file = open('VOCdevkit\VOC2007\Annotations\%s.xml' %image_id) out_file = open('VOCdevkit\VOC2007\labels\%s.txt' %image_id, 'w') tree=ET.parse(in_file) root = tree.getroot() size = root.find('size') w = int(size.find('width').text) h = int(size.find('height').text) for obj in root.iter('object'): difficult = obj.find('difficult').text cls = obj.find('name').text if cls not in classes or int(difficult) == 1: continue cls_id = classes.index(cls) xmlbox = obj.find('bndbox') b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text), float(xmlbox.find('ymax').text)) bb = convert((w,h), b) out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n') in_file.close() out_file.close() wd = os.getcwd() wd = os.getcwd() work_sapce_dir = os.path.join(wd, "VOCdevkit\\") if not os.path.isdir(work_sapce_dir): os.mkdir(work_sapce_dir) work_sapce_dir = os.path.join(work_sapce_dir, "VOC2007\\") if not os.path.isdir(work_sapce_dir): os.mkdir(work_sapce_dir) annotation_dir = os.path.join(work_sapce_dir, "Annotations\\") if not os.path.isdir(annotation_dir): os.mkdir(annotation_dir) clear_hidden_files(annotation_dir) image_dir = os.path.join(work_sapce_dir, "JPEGImages\\") if not os.path.isdir(image_dir): os.mkdir(image_dir) clear_hidden_files(image_dir) VOC_file_dir = os.path.join(work_sapce_dir, "ImageSets\\") if not os.path.isdir(VOC_file_dir): os.mkdir(VOC_file_dir) VOC_file_dir = os.path.join(VOC_file_dir, "Main\\") if not os.path.isdir(VOC_file_dir): os.mkdir(VOC_file_dir) train_file = open(os.path.join(wd, "2007_train.txt"), 'w') test_file = open(os.path.join(wd, "2007_test.txt"), 'w') train_file.close() test_file.close() VOC_train_file = open(os.path.join(work_sapce_dir, "ImageSets\\Main\\train.txt"), 'w') VOC_test_file = open(os.path.join(work_sapce_dir, "ImageSets\\Main\\test.txt"), 'w') VOC_train_file.close() VOC_test_file.close() if not os.path.exists('VOCdevkit\\VOC2007\\labels'): os.makedirs('VOCdevkit\\VOC2007\\labels') train_file = open(os.path.join(wd, "2007_train.txt"), 'a') test_file = open(os.path.join(wd, "2007_test.txt"), 'a') VOC_train_file = open(os.path.join(work_sapce_dir, "ImageSets\\Main\\train.txt"), 'a') VOC_test_file = open(os.path.join(work_sapce_dir, "ImageSets\\Main\\test.txt"), 'a') list = os.listdir(image_dir) # list image files probo = random.randint(1, 100) print("Probobility: %d" % probo) for i in range(0,len(list)): path = os.path.join(image_dir,list[i]) if os.path.isfile(path): image_path = image_dir + list[i] voc_path = list[i] (nameWithoutExtention, extention) = os.path.splitext(os.path.basename(image_path)) (voc_nameWithoutExtention, voc_extention) = os.path.splitext(os.path.basename(voc_path)) annotation_name = nameWithoutExtention + '.xml' annotation_path = os.path.join(annotation_dir, annotation_name) probo = random.randint(1, 100) print("Probobility: %d" % probo) if(probo < 75): if os.path.exists(annotation_path): train_file.write(image_path + '\n') VOC_train_file.write(voc_nameWithoutExtention + '\n') convert_annotation(nameWithoutExtention) else: if os.path.exists(annotation_path): test_file.write(image_path + '\n') VOC_test_file.write(voc_nameWithoutExtention + '\n') convert_annotation(nameWithoutExtention) train_file.close() test_file.close() VOC_train_file.close() VOC_test_file.close()(3)修改配置文件 新建data\voc.names文件,该文件内容存放数据标签名,可以复制data\voc.names再根据自己情况的修改(修改成自己的分类);可以重新命名等。
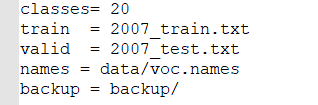
classes = N ,N为自己的分类数量;train 训练集完整路径列表;valid 测试集完整路径列表;names = data/voc.names 类别文件;backup = backup/ 训练结果保存在darknet/backup/目录下。 新建cfg\yolov4-voc.cfg,可以复制cfg\yolov4-custom.cfg再根据自己情况的修改;可以重新命名等。yolov4-voc.cfg文件参数说明:
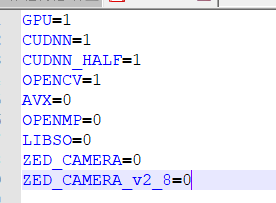
在cfg\yolov4-voc.cfg文件中,三个yolo层和各自前面的convolutional层的参数需要修改:filters=num╳(classes+5),5的意义是4个坐标加一个置信率num表示YOLO中每个cell预测的框的个数,yolo层中的classes为类别,YOLOV3中为3。此 处 的 值 要 根 据 自 己 的 数 据 集 进 行 更 改 , 例 如 识 别 4 个 类 别 , 则 :filters=3 ╳(4+5)=27。 (4)使用YOLOv4进行训练 下载权重文件:yolov4.conv.137,放置在D:\darknet\build\darknet\x64目录下这里的训练使用迁移学习,所以下载的yolov4在coco数据集上的预训练权重文件(不含全连接层) 训练网络(如需要显示训练过程的map变化,在命令末尾加-map): darknet.exe detector train data\voc.data cfg\yolov4.cfg yolov4.conv.137 -map网络训练建议: batch=16subdivisions=8 (如果显存溢出改为16,64)把max_batches设置为 (classes*2000);但最小为4000。例如如果训练3个目标类别,max_batches=6000把steps改为max_batches的80% and 90%;例如steps=4800, 5400。为增加网络分辨率可增大height和width的值,但必须是32的倍数 (height=608, width=608 or 32的整数倍) 。这有助于提高检测精度。(5)mAP性能统计 统计 mAP@IoU=0.50: darknet.exe detector map data\voc.data cfg\yolov4-test.cfg backup\yolov4.weights统计 mAP@IoU=0.75: darknet.exe detector map data\voc.data cfg\yolov4-test.cfg backup\yolov4.weights -iou_thresh 0.75 8、Anchor Box先验框聚类分析与修改使用k-means聚类获得自己数据集的先验框大小: darknet.exe detector calc_anchors data\voc.data -num_of_clusters 9 -width 608 -height 608D:\darknet\build\darknet\x64目录下生成anchors.txt文件,修改cfg文件中的先验框大小,重新训练和测试 二、Linux环境下的YOLOv4目标检测 1、环境配置环境准备:Ubuntu16.04、CUDA10.1、cuDNN 7.65、OpenCV 3.4 opencv安装可以基于源码,可以使用命令安装:apt-get install libopencv-dev 2、YOLOv4下载和编译 下载darknet:git clone https://github.com/AlexeyAB/darknet.gitcd darknetmake #直接make则使用的是darknet原始配置(使用CPU)如果使用GPU和OpenCV,则将Makefile文件中的对应项改为1,然后再执行make命令
测试单张图片: ./darknet detect cfg/yolov4.cfg yolov4.weights data/dog.jpg测试多张图片(根据提示输入图片路径): ./darknet detect cfg/yolov4.cfg yolov4.weights 三、提高YOLOv4目标检测性能的技巧 1、YOLOv4训练前的改善技巧 增大.cfg文件中的网络分辨率(height=608, width=608或任何32的倍数)有助于提高检测精度。检查要检测的每个目标在数据集中都标注了标签。数据集中的任何目标都要有标签,数据集中如果有错误的标签也会导致训练出问题。得到的损失函数很高并且mAP很低,训练出错了吗?在训练命令末尾使用-show_imgs 标志来运行训练,你是否能看到有正确的边界预测框的目标(在Windows的窗口或者aug_...jpg)?如果没有,训练是发生错误了。对于要检测的每个目标,训练集中必须至少有一个相似的目标,且它们具有大致相同的形状:形状、物体的侧面、相对大小、旋转角度、倾斜度、照明度。 理想的是训练集应包含目标的不同图像:比例、旋转、照明、不同侧面、不同背景。每类图片最好有2000张不同的图像,并且训练的迭代次数(iterations)设置为2000×classes以上(最少为4000)。训练数据集最好包含有不想检测的未标注物体的图像-即无边界框的负样本(空 的.txt文件)。并且负样本图像与带有物体的图像大致一样多。如果要对每个图像中的大量目标进行训练,请在cfg文件的最后一个[yolo]层中添加参数max = 200或更大的值 。为了使检测到的边界框更准确,可以向每个[yolo]层添加3个参数ignore_thresh = .9 iou_normalizer = 0.5 iou_loss = giou并进行训练,它将增加[email protected],但降低[email protected]。从cfg文件重新计算数据集的宽度和高度锚框(聚类分析):darknet detector calc_anchors data / obj.data -num_of_clusters 9 -width 416 -height 416然后在cfg文件的3个[yolo]图层中的每个层中设置9个锚框。 但是,你应该为每个[yolo]层更改anchor masks =的索引。 同样,你应该在每个[yolo]层之前更改filters=(classes + 5)*。 如果许多计算出的锚不适合在适当的层下,则只需尝试使用所有默认锚框即可。 2、YOLOv4训练后的改善技巧 通过在.cfg文件中设置(height=608 and width=608)或(height=832 and width=832)或(任何32的倍数)来提高网络分辨率。这可以提高精度并可以检测到小目标。不必再次训练网络,只需使用已经针对416x416分辨率进行训练的权重文件即可,但是要获得更高的准确性,应该使用更高分辨率的608x608或832x832进行训练,请注意:如果发生显存溢出错误,在.cfg 文件应该增加subdivisions=16, 32 or 64 (batch=64时)。
|


















【本文地址】
今日新闻 |
推荐新闻 |