【目标检测论文解读复现NO.32】基于改进YOLO的飞机起降阶段跟踪方法 |
您所在的位置:网站首页 › yolov4目标检测 › 【目标检测论文解读复现NO.32】基于改进YOLO的飞机起降阶段跟踪方法 |
【目标检测论文解读复现NO.32】基于改进YOLO的飞机起降阶段跟踪方法
|
前言
此前出了目标改进算法专栏,但是对于应用于什么场景,需要什么改进方法对应与自己的应用场景有效果,并且多少改进点能发什么水平的文章,为解决大家的困惑,此系列文章旨在给大家解读最新目标检测算法论文,帮助大家解答疑惑。解读的系列文章,本人已进行创新点代码复现,有需要的朋友可关注私信我。
一、摘要
针对起降阶段飞机目标识别跟踪中人工与雷达配合检测效率低的问题,提出一种轻量化单目标识别跟踪模型。引入MobileNetv3e改进YOLOv4的特征提取网络,利用基于马尔科夫链蒙特卡罗采样的K-means++算法对自建数据集标注的边界框尺寸信息进行聚类分析。将数据集按7:3进行样本训练与测试,实现根据飞机垂尾处的公司标记自动分类识别、跟踪。实验结果表明,改进后算法的准确率达到94.29%,每秒处理的帧数达到67f/s ,速度相比原来的YOLOv4算法提高了35f/s,提升了检测效率,具有较好的理论价值与应用前景。 二、网络模型及核心创新点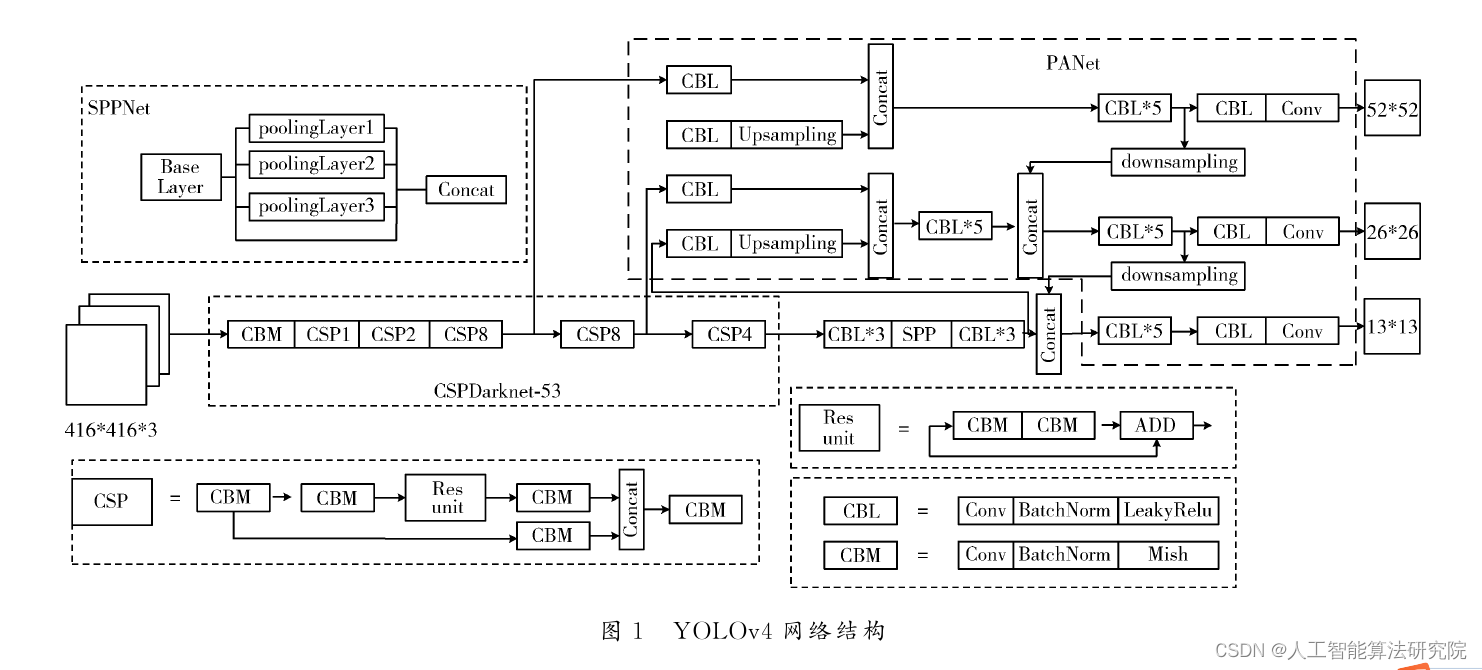
1.改进的YOLOv4目标识别算法 2.改进K-means聚类 三、应用数据集(模型构建过程)本文采用自建数据集(图6),其中含有5000张公开的飞机目标图像,由视频图像按帧获取,目前涉及8家航空公司。图像用label Img工具标注,其中70%用于训练集,30%用于验证测试集。考虑到光照等因素影响,在图像获取后,利用算法进行了数据增广。 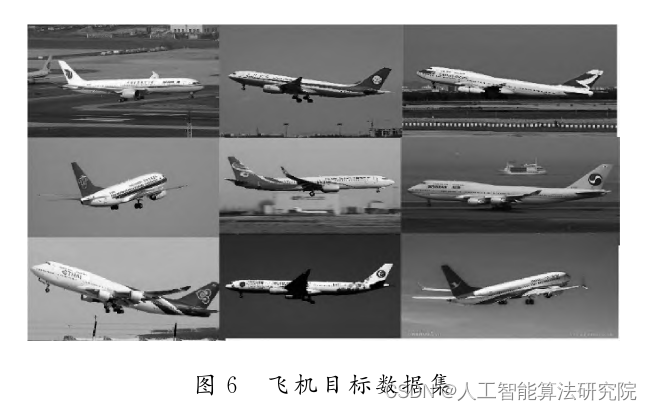 四、实验效果
四、实验效果
通过消融实验进一步验证改进策略对网络模型的影响。将YOLOv4算法、引入Mobile Ntv3e的YOLOv4算法(用YOLOv4-M表示),以及本文改进聚类算法后的YOLOv4Mobile Ntv3e算法进行相同条件下的实验。 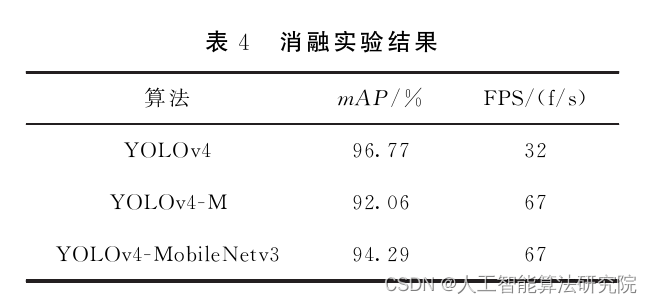
实验结果见表4,YOLOv4-Mobile Ntv3e与YOLOv4-M算法在识别速度方面明显优于YOLOv4,提高了35FPS,可见Mobile Ntv3e的引入,提高了模型的检测速度;在识别精度方面,YOLOv4-M引入Mobile Ntv3e后,略有下降,而YOLOv4-Mobile Ntv3e与YOLOv4-M相比,模型精度提高了2.23%,同时检测速度没有损失,可见,本文聚类算法实现了模型精度的提升,虽然本文算法相比原YOLOv4识别精度下降2.48%,但仍可以达到94.29%,能够满足目标识别需求。 五、实验结论实验结果表明,单帧图像的识别速度达到67f/s,视频图像的识别速度达到29f/s;检测精度总体维持在90%以上;模型的大小相比YOLOv4及其它传统算法大幅降低,实现了模型轻量化,提高了飞机目标识别效率。目前识别的飞机种类为民航客机,接下来可以尝试对其它种类机型进行识别,进一步提高模型的实用性。 六、投稿期刊介绍
注:论文原文出自 郭晓静,李 欣,隋昊达;基于改进YOLO的飞机起降阶段跟踪方法;计算机工程与设计. 解读的系列文章,本人已进行创新点代码复现。 |
【本文地址】
今日新闻 |
推荐新闻 |