【opencv】:图像的透视变换 |
您所在的位置:网站首页 › x线透视的过程图像能录制吗 › 【opencv】:图像的透视变换 |
【opencv】:图像的透视变换
|
图像的透视变换
1.透视变换数学实现原理2.code案例2.1 图像的平移2.2 图像的旋转2.3 透 视2.4 更加复杂的仿射变换
1.透视变换数学实现原理
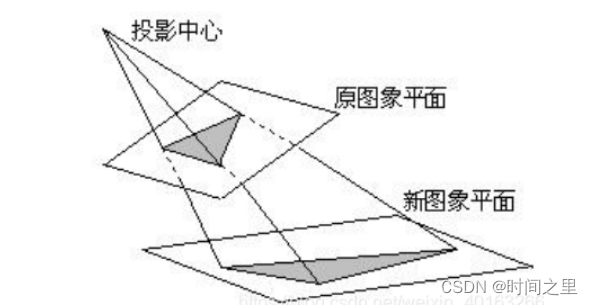
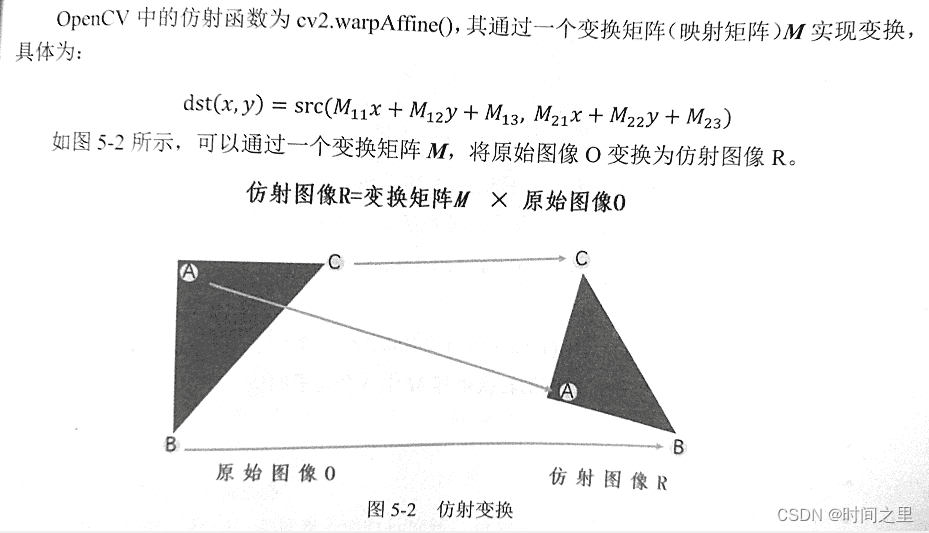
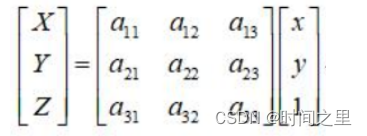
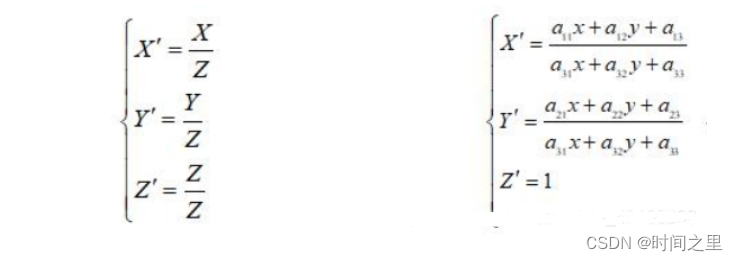
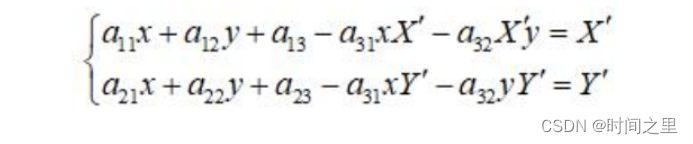
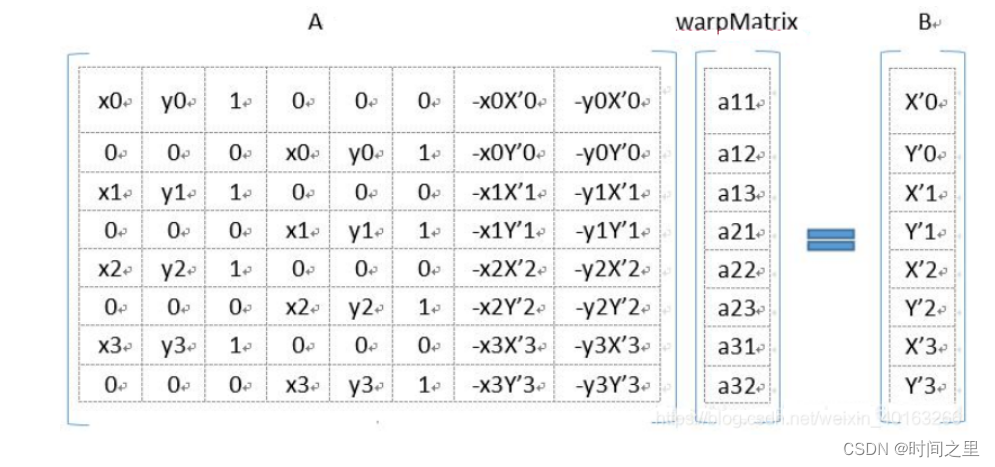
仿射变换(Affine Transformation或 Affine Map) , 又称为仿射映射, 是指在几何中, 图像进行从一个向量空间进行一次线性变换和一次平移, 变换为到另一个向量空间的过程。我们常说的仿射变换是透视变换的一个特例。 以上便是透视变换的原理图,即将源图像通过投影映射,从原图像平面变换到新图像平面。通用的变换公式为: (X,Y,Z)是原图像平面坐标点, 对应得到变换后的图像平面坐标点为(X’;Y’;Z’) ,因为我们处理的是二维的图像,所以可以令Z’=1,并将变换后的图像坐标除以Z’,将图片由三维降维为两维,然后可以得到以下方程: 一般地, 我们令a33=1(方便得到X’,Y’,使方程3等号左侧分母为1), 展开上面公式, 得到一个点的情况: 方程3中共有8个未知数(aij),如果要解出该未知数,需要列八组方程,即分别在源图像和目标图像上人为选择四个点(通常选择图片的四个顶点) 在源图像上选四个坐标点,分别为A: (x0,y0),(x1,y1),(x2,y2),(x3,y3) 在目标图像上选四个坐标点,分别为B: (X’0,Y’0),(X’1,Y’1),(X’2,Y’2),(X’3,Y’3) 带入方程3,可以得出方程4,如下:
输出结果: warpMatrix [[-5.01338334e-01 -1.35357643e+00 5.82386716e+02] [-1.38100642e-15 -4.84035391e+00 1.38781980e+03] [-2.29650079e-19 -4.14856327e-03 1.00000000e+00]]原文链接: OpenCV中,提供了仿射函数cv2.warpAffine()实现对图像的旋转 dst = cv2.warpAffine(src, M, dsize, [, flags[, borderMode[, borderValue]]]) dst代表仿射后的输出图像,dsize决定输出图像的实际大小 src代表要仿射的原始图像 M代表一个2X3的变换矩阵。使用不同的矩阵,就可以实现不同的仿射变换 dsize表示输出图像的尺寸大小 flags表示差值方法,默认为INTER_LINEAR。当值为WARP_INVERSE_MAP时,意味着M为逆变换,实现从目标图像dst到src的逆变换。具体值见下表。 borderMode表示边类型。默认为BORDER_CONSTANT。当值为BORDER_TRANSPARENT时,意味着目标图像内的值不做改变,这些值对应着原始图像的异常值。 border表示边界值,默认为0 2.code案例 2.1 图像的平移说明:123.jpg格式为800X600 ,枫叶图像四个点坐标为: 左上角,右上角,左下角,右下角 [80, 266], [494, 27], [239, 543], [655, 300]] import cv2 import numpy as np img = cv2.imread(r'C:\Users\Administrator\Desktop\123.jpg') height, width = img.shape[:2] x = 100 y = 200 M = np.float32([[1, 0, x], [0, 1, y]]) move1 = cv2.warpAffine(img, M, (width, height)) cv2.imshow('source', img) cv2.imshow('dst', move1) cv2.waitKey()
使用cv2.warpAffine对图像进行旋转时,可以通过cv2.getRotationMatrix2D()获得转换矩阵。该函数的基本用法: retval = cv2.getRotationMatrix2D(center, angle, scale)式中: center是旋转的中心点 angle是旋转角度,正数表示逆时针旋转,负数表示顺时针旋转 scale为变换尺寸(缩放大小) 例:要求以图像中心为旋转点,逆时针旋转45°,并将目标缩小为原始图像的0.5倍。 import cv2 img = cv2.imread(r'C:\Users\Administrator\Desktop\123.jpg') height, width = img.shape[:2] M = cv2.getRotationMatrix2D((width/2, height/2), 45, 1) rotation = cv2.warpAffine(img, M, (width, height)) cv2.imshow('source', img) cv2.imshow('dst', rotation) cv2.waitKey()
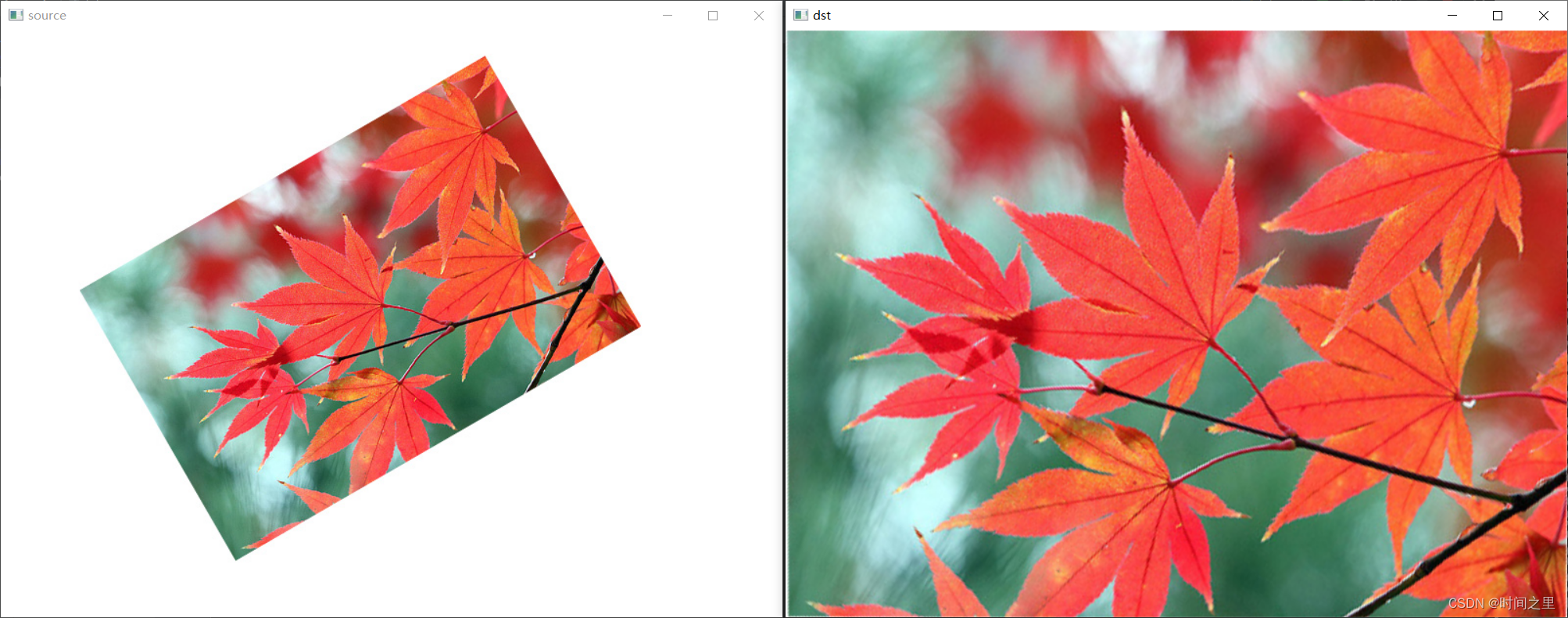
上面的仿射变换可以将矩形映射为任意平行四边形。透视变换可以将矩形映射成任意四边形。 透视变换通过函数cv2.warpPerspective()实现,该函数的语法是: dst = cv2.warpPerspective(src, M, dsize, [, flags[, borderMode[, borderValue]]])dst代表透视处理后的输出图像,dsize决定输出图像的实际大小 src代表要透视的图像 M为一个3X3的变换矩阵 dsize代表输出图像的尺寸大小 flags表示差值方法,默认为INTER_LINEAR。当值为WARP_INVERSE_MAP时,意味着M为逆变换,实现从目标图像dst到src的逆变换。具体值见下表。 borderMode表示边类型。默认为BORDER_CONSTANT。当值为BORDER_TRANSPARENT时,意味着目标图像内的值不做改变,这些值对应着原始图像的异常值。 border表示边界值,默认为0 与仿射变化一样,可以使用函数cv2.getPerspectiveTransform()来生成转换矩阵。 语法: retval = cv2.getPerspectiveTransform(src, dst) src表示输入图像的四个顶点坐标 dst表示输出图像的四个顶点坐标 例:将图像透视。 import cv2 import numpy as np img = cv2.imread(r'C:\Users\Administrator\Desktop\123.jpg') rows, cols, ch = img.shape p1 = np.float32([[80, 266], [494, 27], [239, 543], [655, 300]]) # 左上角,右上角,左下角,右下角 p2 = np.float32( [[0, 0], [800, 0], [0, 600], [800, 600]]) M = cv2.getPerspectiveTransform(p1, p2) dst = cv2.warpPerspective(img, M, (cols, rows)) cv2.imshow('source', img) cv2.imshow('dst', dst) cv2.waitKey()测试2:
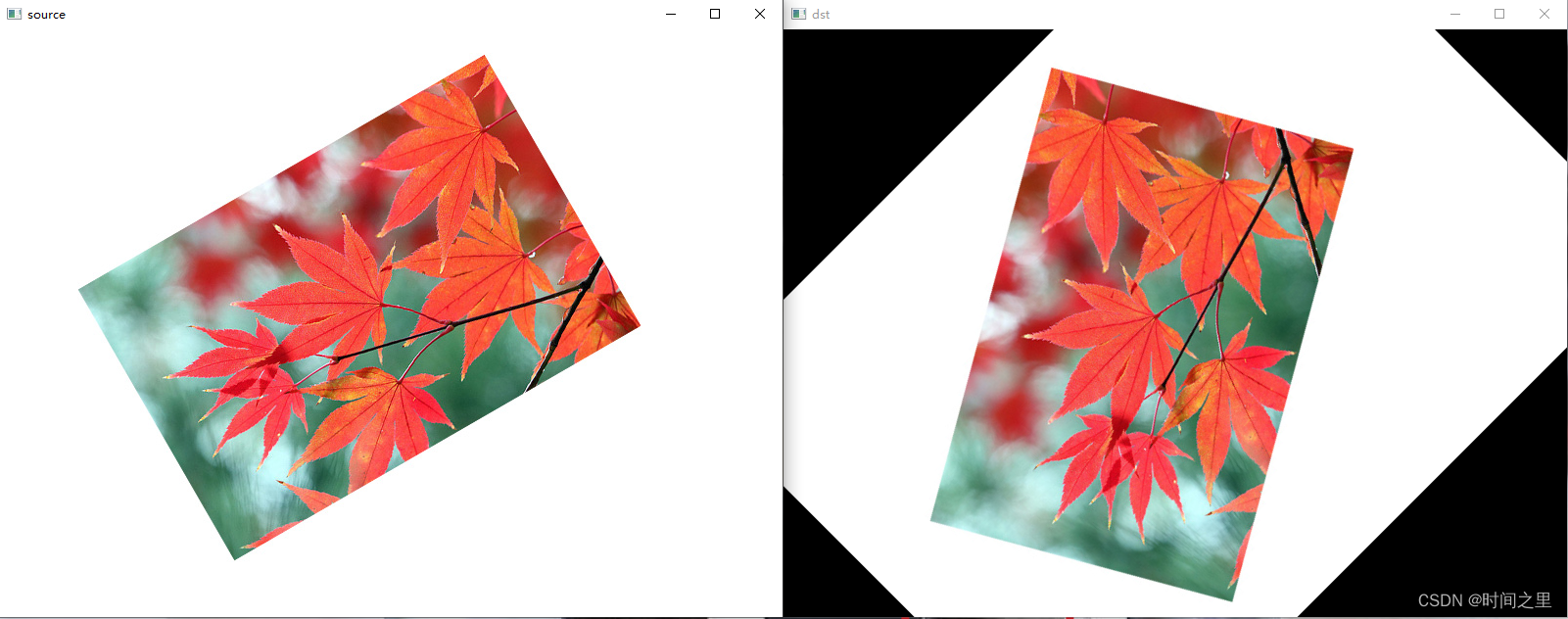
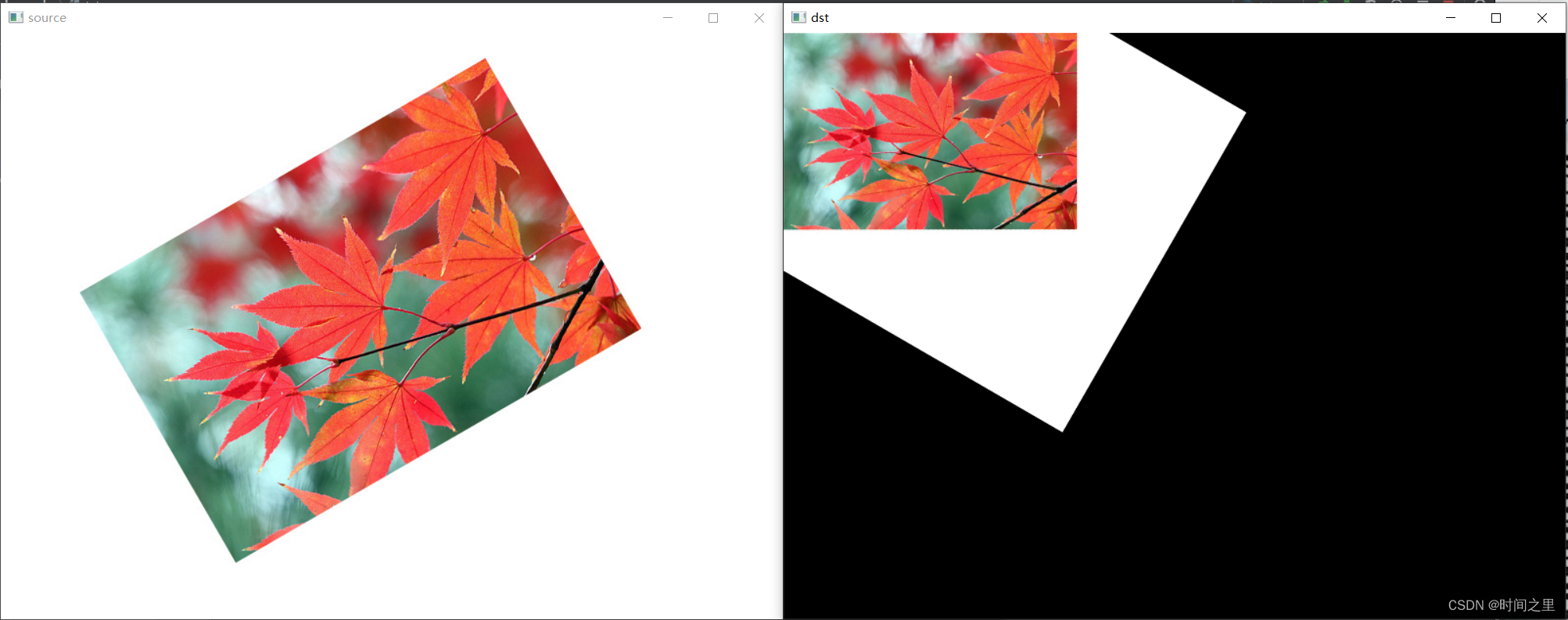
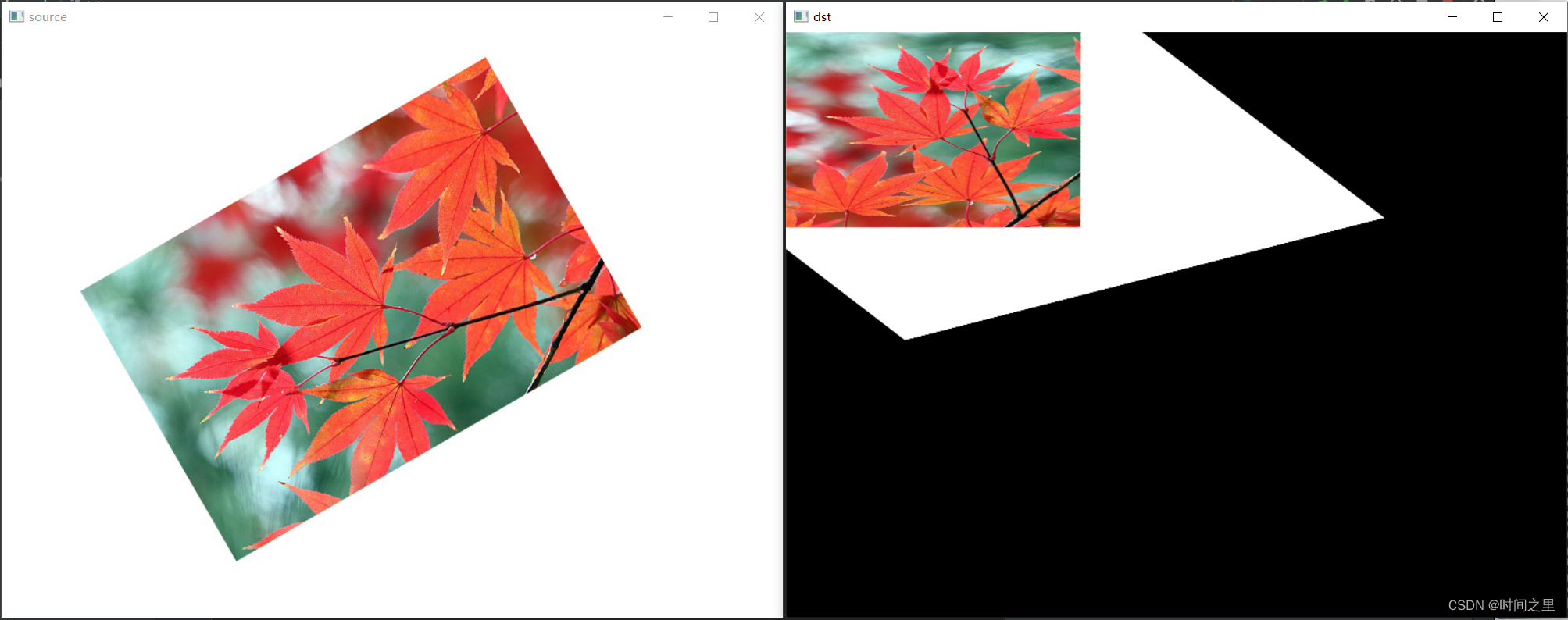
对于更加复杂的变换,OpenCV提供了cv2.getAffineTransform()来生成需要的转换矩阵M。 语法: retval = cv2.getAffineTransform(src, dst) src表示输入图像的三个点坐标 dst表示输出图像的三个点坐标 src和dst三个点坐标分别表示平行四边形的左上角、右上角、右下角的三个点。函数cv2.warpAffine()函数以cv2.getAffineTransform(src, dst)获得的转换矩阵M为参数,将src中的点仿射到dst中,函数cv2.getAffineTransform(src, dst)对指定的点完成映射之后,将所有其他点的映射关系按照指定点的关系确定。 import cv2 import numpy as np img = cv2.imread(r'C:\Users\Administrator\Desktop\123.jpg') height, width = img.shape[:2] rows, cols, ch = img.shape p1 = np.float32([[81, 265], [240, 540], [496, 26]]) p2 = np.float32( [[0, 0], [0, 200], [300, 0]]) M = cv2.getAffineTransform(p1, p2) dst = cv2.warpAffine(img, M, (cols, rows)) cv2.imshow('source', img) cv2.imshow('dst', dst) cv2.waitKey()
参考: |
 使用python,将上述推导过程定义为函数WarpPerspectiveMatrix(src, dst),计算出变换矩阵warpMatrix,如下
使用python,将上述推导过程定义为函数WarpPerspectiveMatrix(src, dst),计算出变换矩阵warpMatrix,如下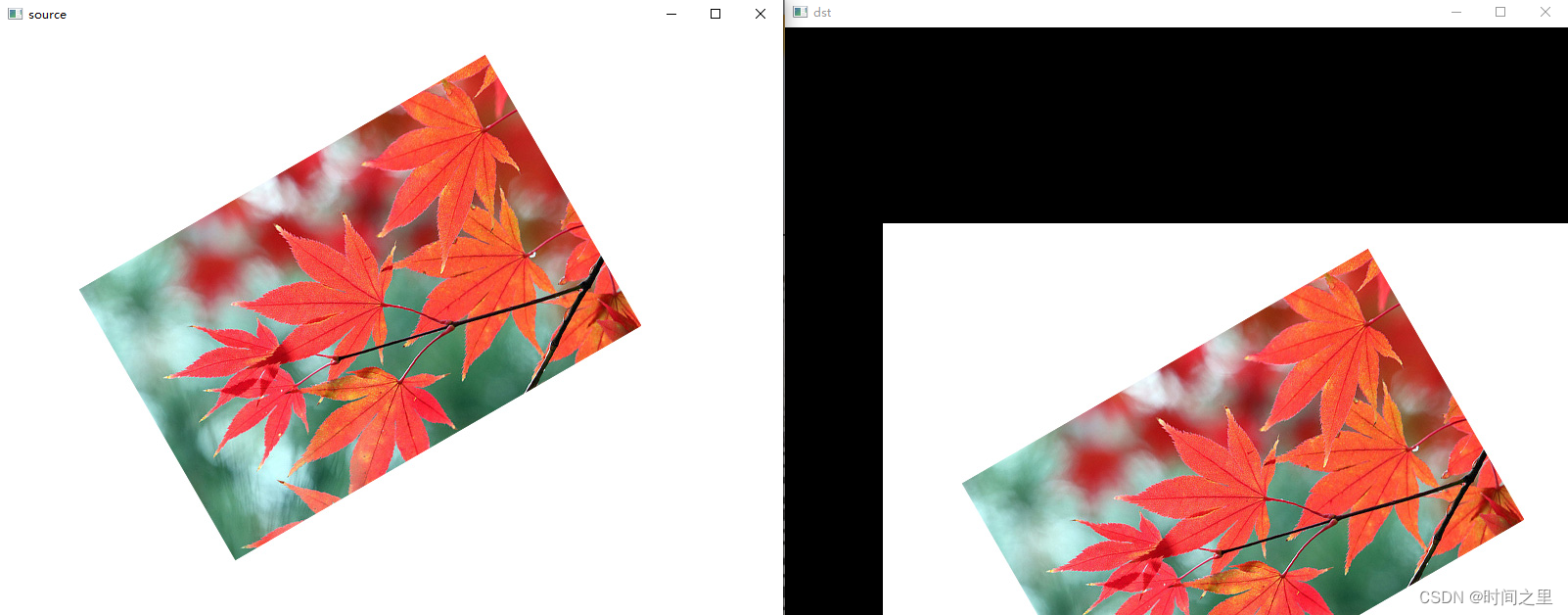
【本文地址】
今日新闻 |
推荐新闻 |