PID的TRICK(二)IP控制器 |
您所在的位置:网站首页 › wk4845mn控制器 › PID的TRICK(二)IP控制器 |
PID的TRICK(二)IP控制器
PID的TRICK(二)IP控制器
 FrancisZhao
分类:运动控制
发布时间 2021.09.24阅读数 5036 评论数 0
FrancisZhao
分类:运动控制
发布时间 2021.09.24阅读数 5036 评论数 0
由于信号的微分通常不容易获得,并且容易放大噪声。最通常使用的PID控制结构就应该是PI 控制器了。以电机的速度环为例,控制结构如下: 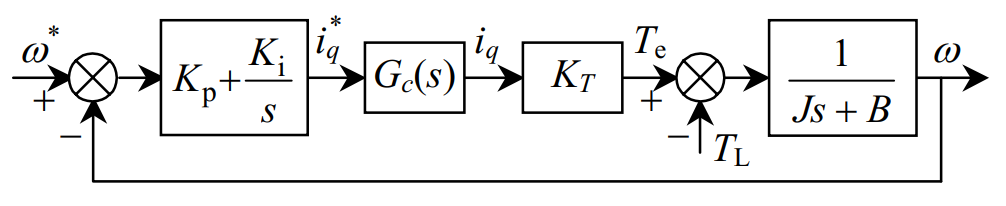
认为电流环Gc=1,很容易的推导出传递函数: 
可知,由于传递函数Gw(s)中的分子的微分项,对于阶跃输入难以避免有超调和冲击。但是在一些控制系统中,不希望有超调和冲击,在此情况下可以将PI控制器修改为IP控制器。IP控制器结构和传递函数如下: 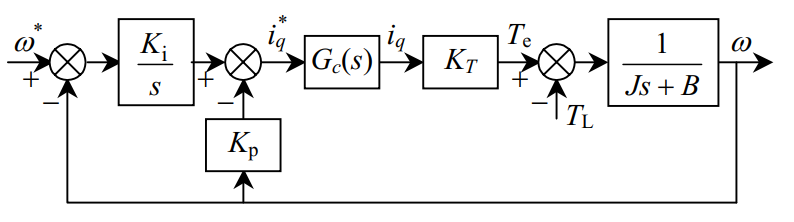
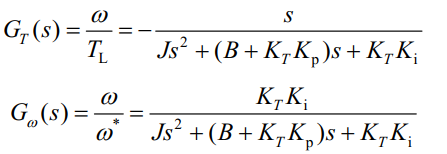
可见,IP与PI控制器对干扰的传递函数是相同的,二者的抗干扰能力相同。但是对输入的的传递函数,IP控制中分子没有微分项,因此可以大大减少超调。,对阶跃输入响应如下: 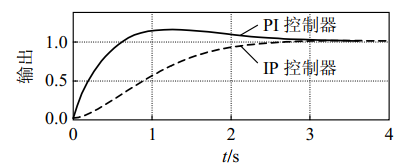
二者的伯德图如下: 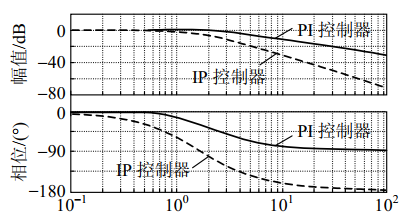
可知,在同样参数的条件下,IP控制器没有超调,但是相应速度较慢,相位延迟较大。为了减少相位延迟加快相应速度,可以对输入信号加微分器求微分,做为前馈添加进控制器中。 IP控制器输出的峰值小,若IP控制器与PI控制器输出的被限制峰值相同,则IP控制器的带宽可以达到2e≈5.44倍的PI控制器带宽。 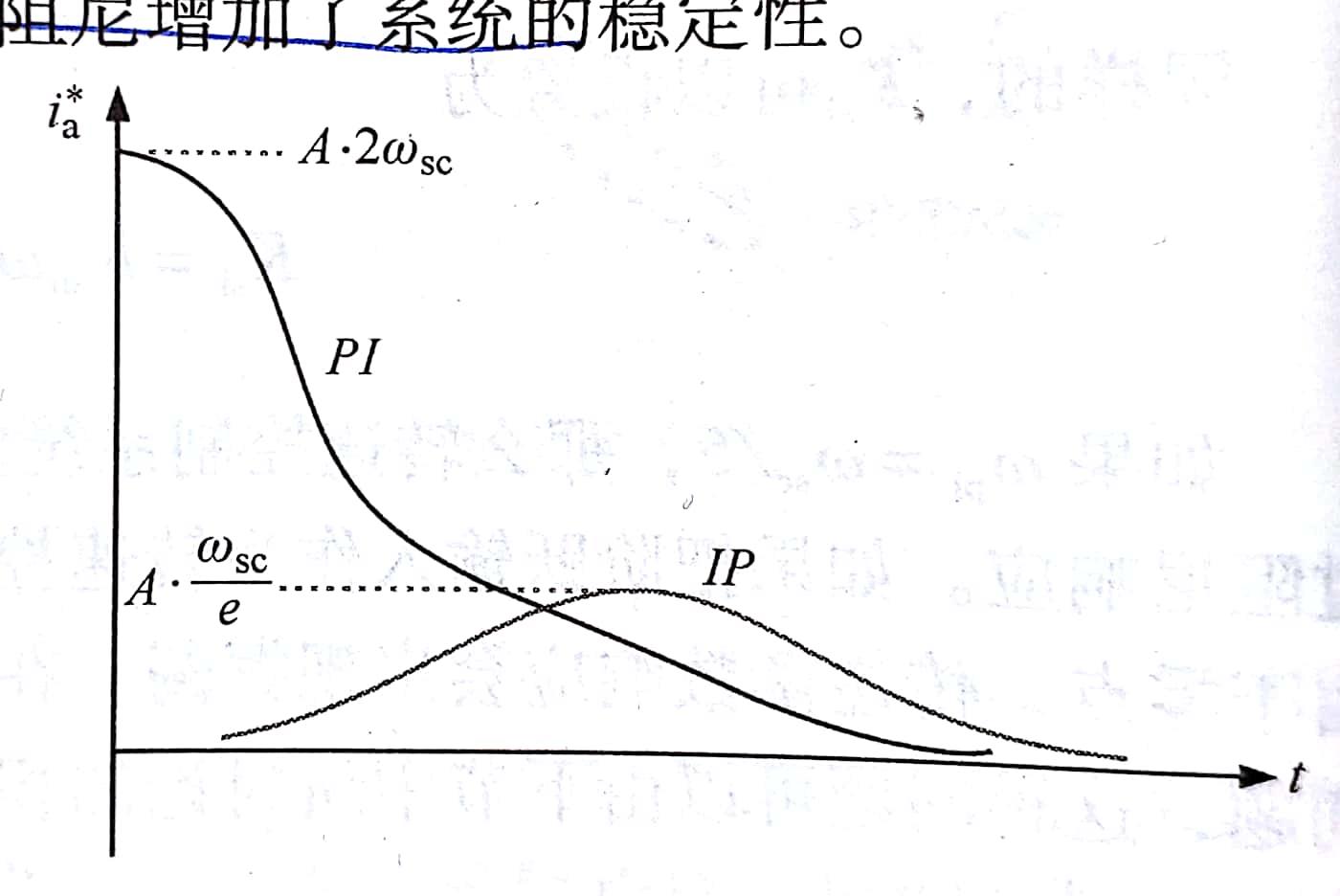 双自由度调节器
双自由度调节器
IP调节器可以做如下的变形: 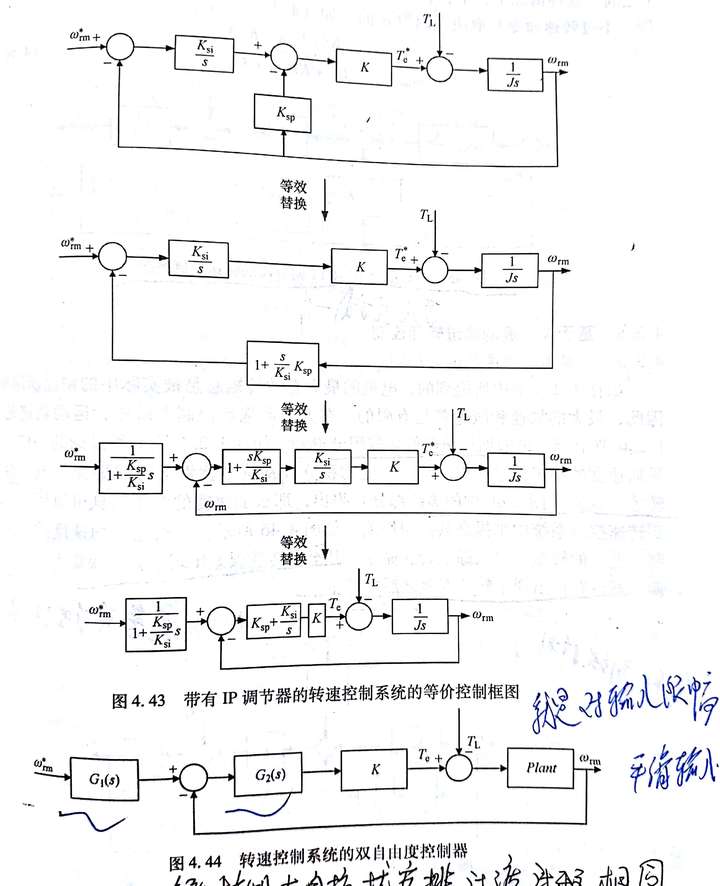
可看出,IP控制器相当于同样的PI控制器,但是对输入加低通滤波器,将输入信号做平滑,减少冲击和超调。 因此,可以将IP和IP控制器混合,组成双自由度调节器,调节器的传递函数和框图如下: 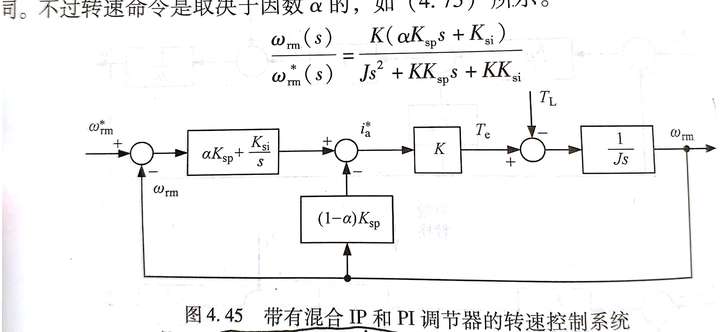
α取值为0--1之间,值越大系统超调大,反应快,反之亦然。无论α取值多少,扰动到转速之间的传递函数保持不变。 FrancisZhao:PID的TRICK(一)简述五种PID积分抗饱和(ANTI-Windup)方法 FrancisZhao:PID的TRICK(二)IP控制器 FrancisZhao:PID的TRICK(三)对给定值的处理:给定的滤波、路径规划、安排过渡过程 FrancisZhao:专栏文章列表以及一些说明欢迎评论,点赞鼓励。 参考文献:1电机传动系统控制 2 基于电磁转矩反馈补偿的永磁同步电机新型 IP 速度控制器 3永磁同步电机转速环的一种变结构 PI 控制器 PID自动控制原理控制器转载原出处:https://zhuanlan.zhihu.com/p/50323981 打赏 0 点赞 0 收藏 0 分享 微信 微博 QQ 图片 上一篇:PID的TRICK(一)简述五种PID积分抗饱和(ANTI-Windup)方法 下一篇:PID的TRICK(三)对给定值的处理:给定的滤波、路径规划、安排过渡过程 |

【本文地址】
今日新闻 |
推荐新闻 |