自抗扰控制ADRC之反馈控制律(NLSEF) |
您所在的位置:网站首页 › vsc是什么 › 自抗扰控制ADRC之反馈控制律(NLSEF) |
自抗扰控制ADRC之反馈控制律(NLSEF)
|
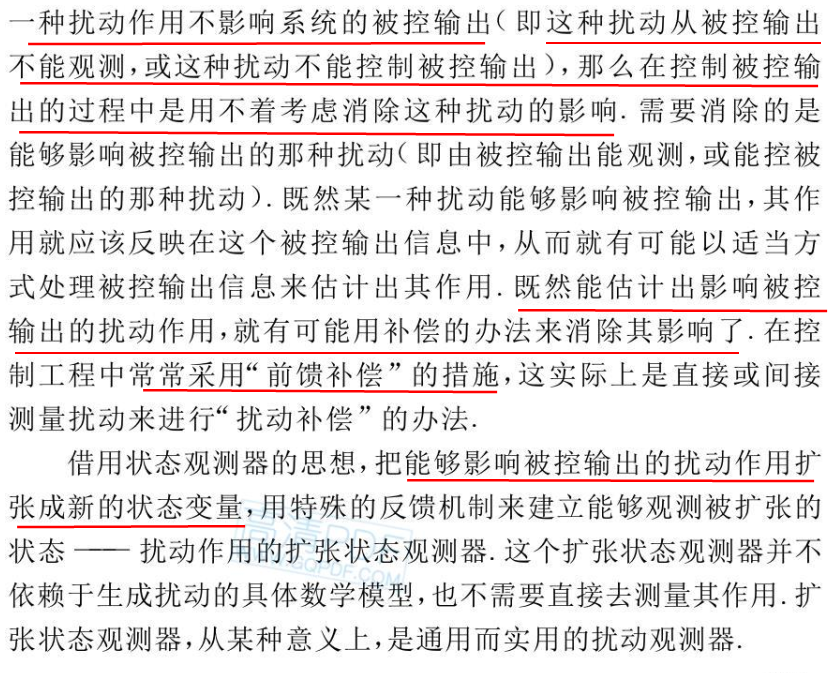
目录 前言 1.非线性状态误差反馈控制律(NLSEF) 1.1 控制律形式 1.2 控制量的生成(或者说扰动的补偿) 1.2.1补偿形式① 1.2.1补偿形式② 2.仿真分析 2.1仿真模型 2.2仿真结果 前言前面的两篇博客依次介绍了TD微分跟踪器安排过渡过程、扩张观测器: 自抗扰控制ADRC之三种微分跟踪器TD仿真分析_Mr. 邹的博客-CSDN博客 自抗扰控制ADRC之扩张观测器_Mr. 邹的博客-CSDN博客 这里个人觉得韩老师书上对扩张观测器的一段描述非常精髓,贴图于此(仅作为学术交流!)
本篇博客介绍ADRC的最后一部分:非线性状态误差反馈控制律(NLSEF)。 1.非线性状态误差反馈控制律(NLSEF) 1.1 控制律形式简单的理解就是用非线性的控制律取代线性的PID,主要有两种形式: ①PD形式:
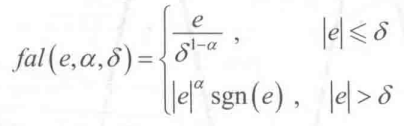
δ为线性区间长度=5*ts~10*ts,ts为采样周期。 ②
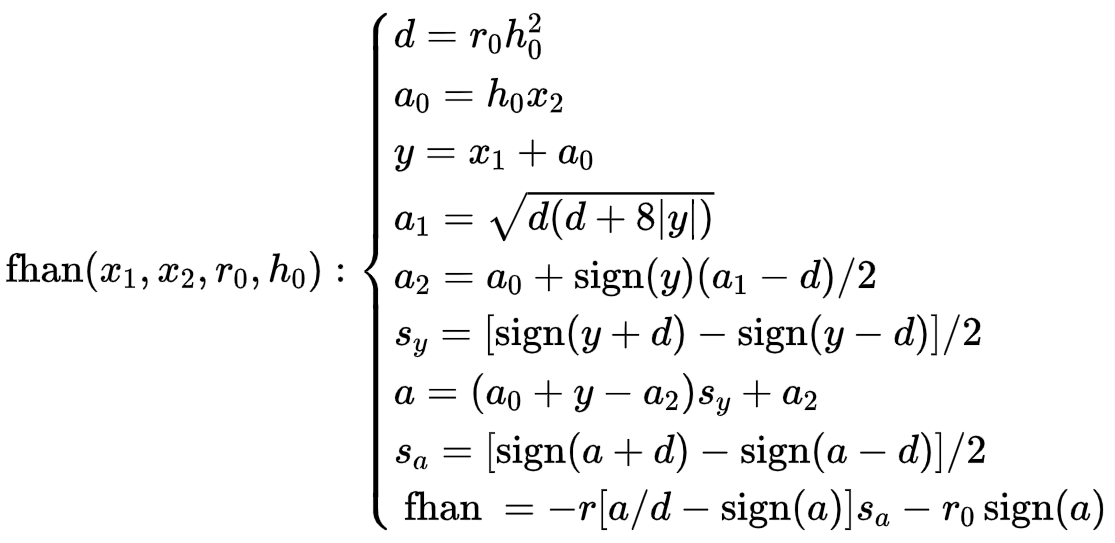
r0和h0为控制参数:r0为速度因子=10~500;②h0为采样周期 1.2 控制量的生成(或者说扰动的补偿) 1.2.1补偿形式①
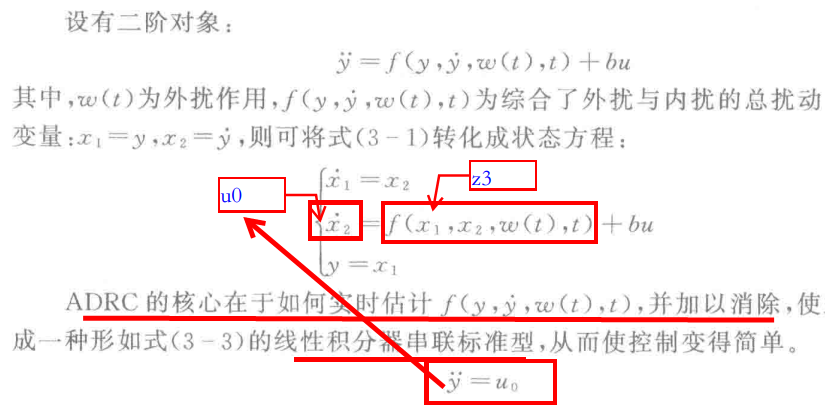
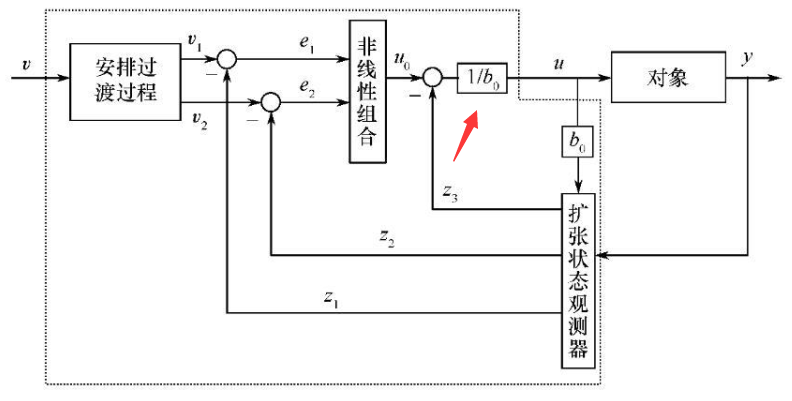
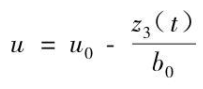
注:这个结构中控制量实际上被分成两部分,其中-z3/b0是补偿扰动的分量,而u0/b0是用非线性反馈来控制积分器串联型的分量。 其对应的ADRC结构图为:
其对应的ADRC结构图为:
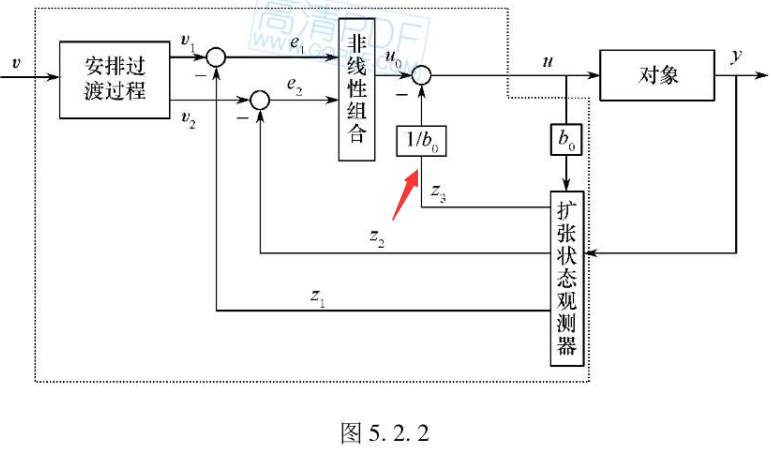
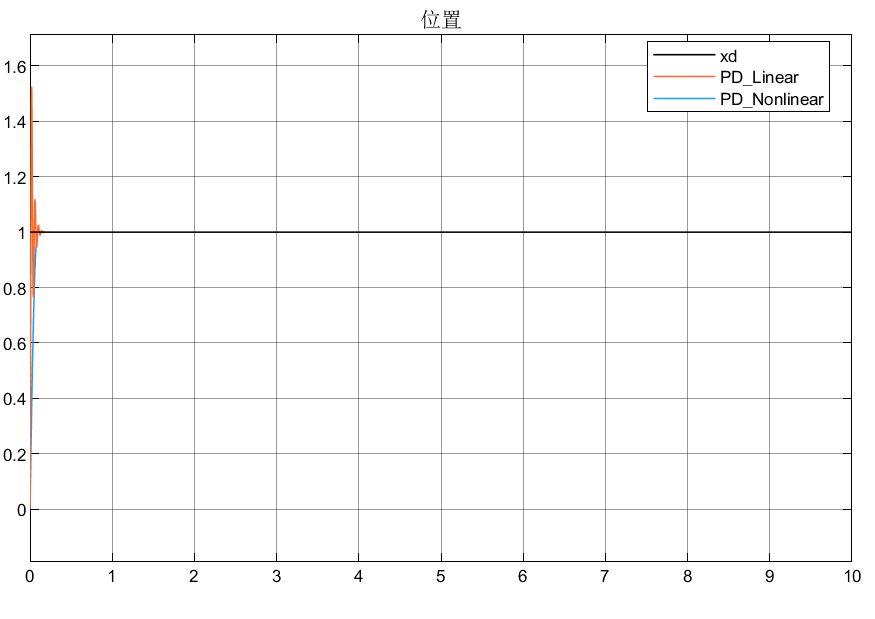
这里选取参数kp=100,kd=1,对象非线性PID和线性PID调节的效果 2.1仿真模型
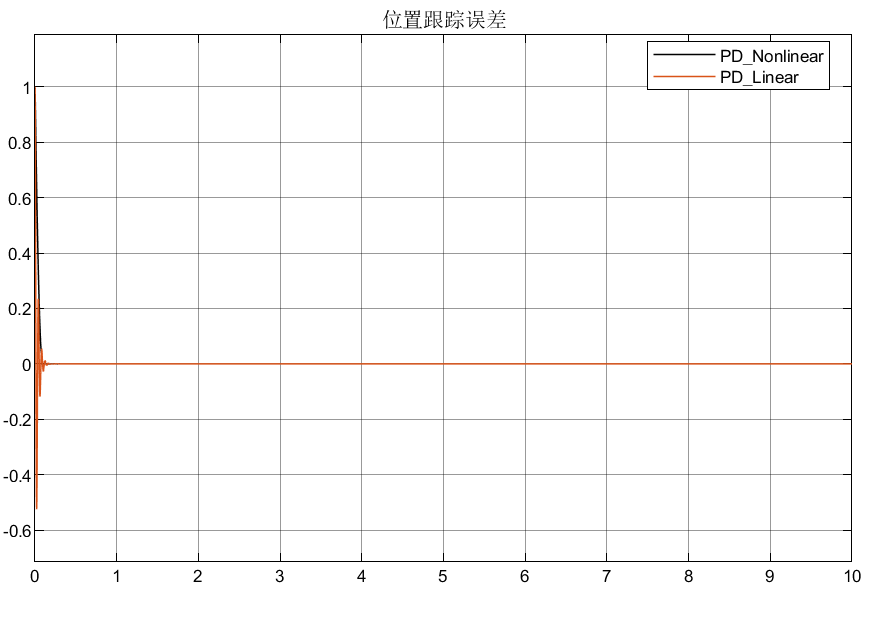
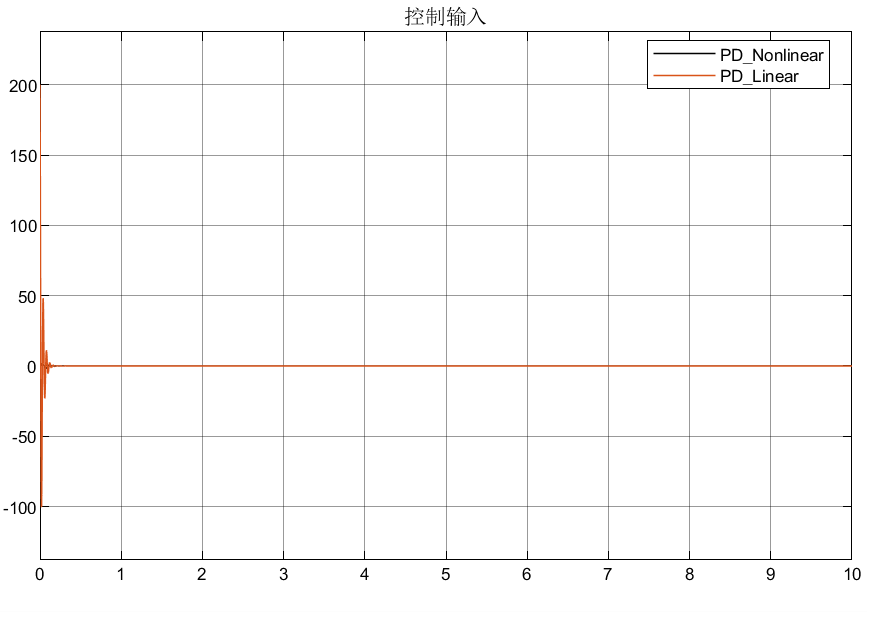
结论:可以看到非线性PID控制效果很够快速且无超调的跟踪指令位置,且控制输入较为缓和。 |



【本文地址】
今日新闻 |
推荐新闻 |