藏金阁(一)PHY AR8035芯片手册 解析 |
您所在的位置:网站首页 › usb3320中文手册 › 藏金阁(一)PHY AR8035芯片手册 解析 |
藏金阁(一)PHY AR8035芯片手册 解析
|
文章目录
特性内部功能框架图芯片模式和地址解析寄存器解析数字回环测试PHY芯片特殊配置硬件上电时序实战应用
特性
10M、100M、1000M兼容IEEE 802.3协议支持RGMII接口到MAC设备,支持I/O口电压级别选项2.5V/1.8V/1.5V/3.3VRGMII定时模式支持,RX内部延时和外部延时支持WOL(wake-on-lan)功能,通知属于系统休眠的唤醒符合IEEE 802.3自协商软件可编程LED模式多种判断回环模式
内部功能框架图
数字环回提供了使用AR8035设备中的数字电路将传输的数据环回到接收器的能力。图2是一个数字环回的框图。  注:速度SPEED_SELECTION 低字节
PHY芯片特殊配置
// 驱动phy配置
static int ar8035_fix_up(struct phy_device *phydev)
{
unsigned short val;
printk("**************[stmmac_main.c]ar8035 fix up \n");
/* Ar8031 phy SmartEEE feature cause link status generates glitch,
* which cause ethernet link down/up issue, so disable SmartEEE
*/
phy_write(phydev, 0xd, 0x3);
phy_write(phydev, 0xe, 0x805d);
phy_write(phydev, 0xd, 0x4003);
val = phy_read(phydev, 0xe);
val &= ~(0x1 注:速度SPEED_SELECTION 低字节
PHY芯片特殊配置
// 驱动phy配置
static int ar8035_fix_up(struct phy_device *phydev)
{
unsigned short val;
printk("**************[stmmac_main.c]ar8035 fix up \n");
/* Ar8031 phy SmartEEE feature cause link status generates glitch,
* which cause ethernet link down/up issue, so disable SmartEEE
*/
phy_write(phydev, 0xd, 0x3);
phy_write(phydev, 0xe, 0x805d);
phy_write(phydev, 0xd, 0x4003);
val = phy_read(phydev, 0xe);
val &= ~(0x1 |

 CLK_25M默认输出25M ———— AR8035只有输出模式,没有输入模式
CLK_25M默认输出25M ———— AR8035只有输出模式,没有输入模式  PHY地址、模式、I/O电压 地址和模式识别PHY芯片重要点,具体可看相关RK与NXP专栏中PHY驱动解析
PHY地址、模式、I/O电压 地址和模式识别PHY芯片重要点,具体可看相关RK与NXP专栏中PHY驱动解析  省电模式:PLLOFF模式下CLK_25M输出会下降,时有时没有 PLLON 模式下CLK_25M持续输出时钟
省电模式:PLLOFF模式下CLK_25M输出会下降,时有时没有 PLLON 模式下CLK_25M持续输出时钟 PHY ID —— 0x20 : 0x004D 0x03 : 0xD072 注:MAC通过MDIO总线发送寄存器地址获取PHY的ID号
PHY ID —— 0x20 : 0x004D 0x03 : 0xD072 注:MAC通过MDIO总线发送寄存器地址获取PHY的ID号 控制读写AR8035 MDIO管理设备地址有两个(MMD3 MMD7) ,用上面两个寄存器去读写管理设备下的寄存器
控制读写AR8035 MDIO管理设备地址有两个(MMD3 MMD7) ,用上面两个寄存器去读写管理设备下的寄存器 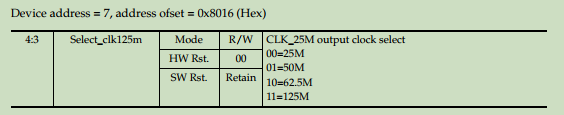 设置CLK_25M的输出时钟125M
设置CLK_25M的输出时钟125M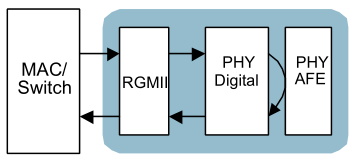
【本文地址】
今日新闻 |
推荐新闻 |