ROS环境下编译运行c++文件 |
您所在的位置:网站首页 › ubuntu运行可执行文件没反应 › ROS环境下编译运行c++文件 |
ROS环境下编译运行c++文件
|
一、要建立一个ROS工程,首先要了解它的组织架构,了解各个文件的功能和作用, 从根本上熟悉ROS项目的组织形式,了解各个文件的功能和作用,才能正确的进行开发和编程。 1、新建test_c_ws工程, mkdir -p test_c_ws/src cd test_c_ws/src 在它下面新建test1功能包 直接使用catkin_create_pkg指令(可以自动创建package.xml和CMakeLists.txt文件) 格式为:catkin_create_pkg 包名 ros库1 ros库2… catkin_create_pkg test1 roscpp cd test1/src/ 在test1/src目录下新建一个wrong.cpp,敲下上述示例代码。 #include “ros/ros.h” int main(){ ROS_WARN(“wrong”); } 2、在test1目录下修改package.xml和CMakeLists.txt文件 package.xml不用修改,主要是修改CMakeLists.txt 找到下面这部分,去掉include前的注释 三、工程的编译与程序运行 1.编译工程 在test_c_ws工程目录下,编译工程 sudo chmod 777 src -R 一键给文件读写、执行权限 catkin_make 编译 2.配置工作空间,刷新环境 source devel/setup.bash 也可以直接加到~/.bashrc文件末尾 3.运行程序(作为节点node单独启动) rosrun test1 wrong |
 详细组织形式
详细组织形式  现在做个简单的例子 二、示例代码: #include “ros/ros.h” int main(){ ROS_WARN(“wrong”); }
现在做个简单的例子 二、示例代码: #include “ros/ros.h” int main(){ ROS_WARN(“wrong”); }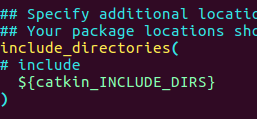 并在下面添加
并在下面添加 正常编译的node,都会在对应的工程目录的devel/lib/对应package/下生成node文件
正常编译的node,都会在对应的工程目录的devel/lib/对应package/下生成node文件  可以直接 ./wrong 运行
可以直接 ./wrong 运行【本文地址】
今日新闻 |
推荐新闻 |