Ubuntu20.04安装ROS2+ROS2 |
您所在的位置:网站首页 › ubuntu20安装后无法启动 › Ubuntu20.04安装ROS2+ROS2 |
Ubuntu20.04安装ROS2+ROS2
|
目录
Ubuntu20.04安装ROS2Set localeSetup SourcesInstall ROS2 packageEnvironment setup测试
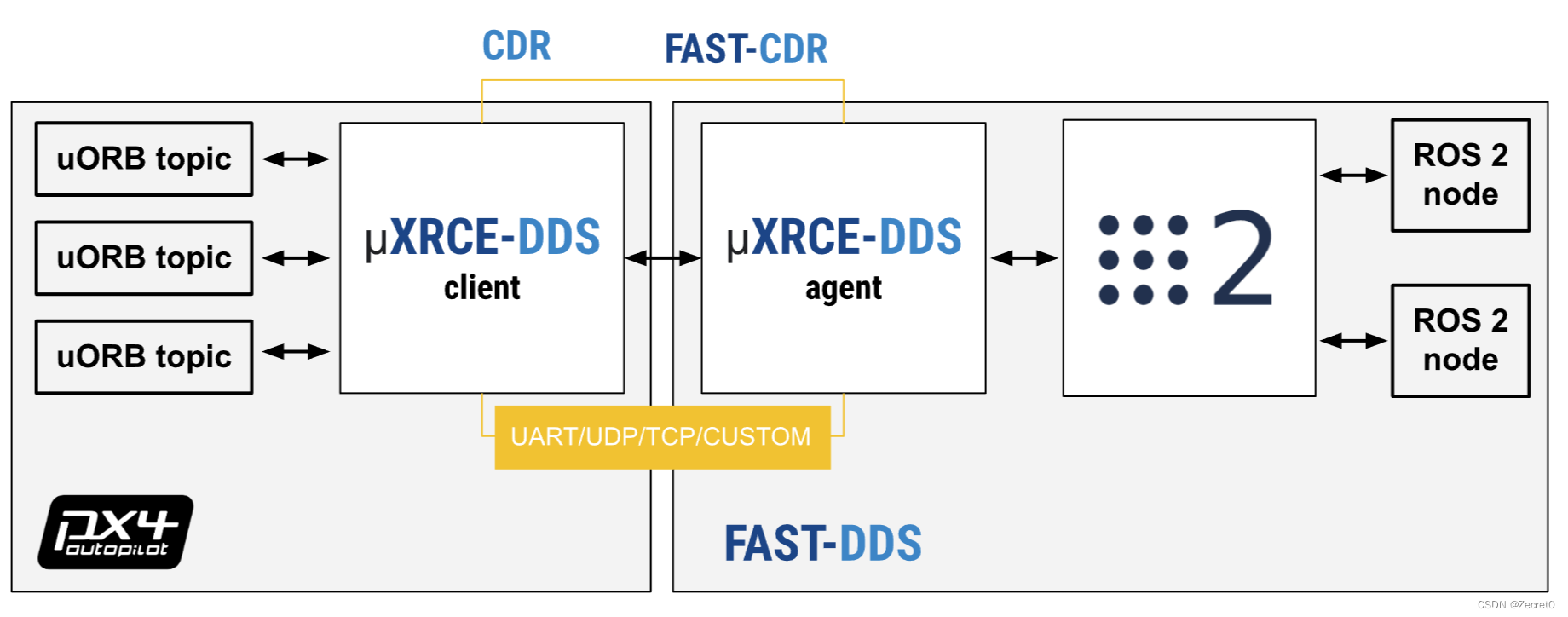
ROS2-PX4框架搭建Install PX4Install ROS2Setup XRCE-DDS Agent & ClientSetup the AgentStart the Client
Build ROS 2 WorkspaceBuilding the WorkspaceRunning the ExampleROS 2 Offboard Control Example
Ubuntu20.04安装ROS2
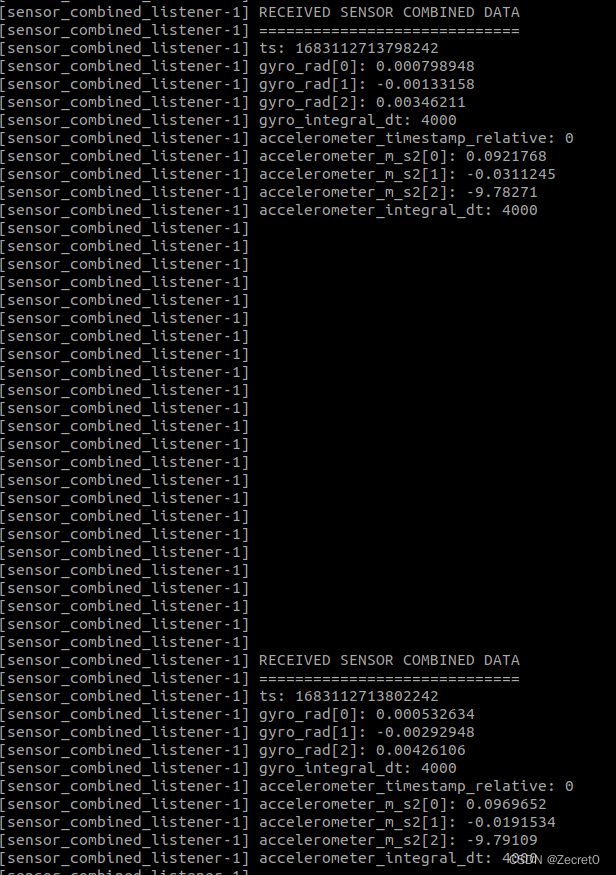
具体步骤参照 官方文档。此外如果安装过程中出现bug,可以参考这篇文章,写得很详细。 Set locale sudo locale-gen en_US en_US.UTF-8 sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8 export LANG=en_US.UTF-8 Setup Sources sudo apt update sudo apt install curl gnupg2 lsb-release curl http://repo.ros2.org/repos.key | sudo apt-key add - sudo sh -c 'echo "deb http://packages.ros.org/ros2/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros2-latest.list' Install ROS2 package sudo apt update sudo apt install ros-foxy-desktop Environment setup用脚本设置: source /opt/ros/foxy/setup.bash但是这样每次打开新终端都得配置一下,如果不想每次打开新终端都输入一遍上述语句,可以这样设置,让终端自动配置好环境: echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc source ~/.bashrc 测试可以用下述例程来测试一下环境是否安装成功: 分别在两个终端运行talker和listener 终端1输入 ros2 run demo_nodes_cpp talker 终端2输入 ros2 run demo_nodes_cpp listener可以看到终端1在不断输出hello world,终端2在接收。那么ros2环境就安装好了 ROS2-PX4框架搭建这个安装教程针对最新的PX4固件(v1.14及以后)。最新的PX4固件直接采用XRCE-DDS中间件来和ROS2连接,用这种最新的方法,环境配置简单了许多。 参照官方教程 以下步骤需要科学上网: 下载PX4源码 git clone https://github.com/PX4/PX4-Autopilot.git --recursive 安装配套的工具 bash ./PX4-Autopilot/Tools/setup/ubuntu.sh 重启电脑 Install ROS2如果按步骤下来,我们之前已经安装好了ROS2 Foxy,接下来还需要安装一些Python的依赖项 pip3 install --user -U empy pyros-genmsg setuptools注意上条指令如果报错,可以重新运行一遍,到没有错误信息为止 Setup XRCE-DDS Agent & Client要让ROS2和PX4通讯,需要在PX4上运行XRCE-DDS的客户端,并在计算机上运行XRCE-DDS的代理 Setup the Agent 启动一个终端,输入以下指令 git clone https://github.com/eProsima/Micro-XRCE-DDS-Agent.git cd Micro-XRCE-DDS-Agent mkdir build cd build cmake .. make sudo make install sudo ldconfig /usr/local/lib/ 启动代理,连接模拟器运行的XRCE-DDS的客户端 MicroXRCEAgent udp4 -p 8888这样代理就启动了,但是在启动PX4的客户端之前,代理不会接收到任何信息。 PX4的仿真环境会自动启动XRCE-DDS的客户端,并连接到UDP 8888端口。我们打开一个新的终端,启动PX4的仿真: make px4_sitl gazebo-classic(如果这里报错找不到gazebo-classic,可以重新下载一个最新版的PX4源码,并–recursive更新一下) PX4的仿真启动完成后,我们就能在之前的终端看到话题了 默认的ROS2工作区建立在home目录下,当然这个可以根据需求更改 打开终端,建立一个新的工作区 mkdir -p ~/ws_sensor_combined/src/ cd ~/ws_sensor_combined/src/ 下载例程和px4_msgs git clone https://github.com/PX4/px4_msgs.git git clone https://github.com/PX4/px4_ros_com.git 配置ros2 foxy的环境,并用colcon编译工作区 cd .. source /opt/ros/foxy/setup.bash colcon build Running the Example可以利用以下例程测试是否搭建成功 在终端输入(在~/ws_sensor_combined/目录下) source install/local_setup.bash 启动示例 ros2 launch px4_ros_com sensor_combined_listener.launch.py只要PX4的仿真是启动着的,就可以在终端接收到订阅的传感器信息:
可以看到无人机自动解锁,并上升到5m的高度,定点盘旋 |


【本文地址】
今日新闻 |
推荐新闻 |