树莓派4B学习笔记 |
您所在的位置:网站首页 › uart最大波特率 › 树莓派4B学习笔记 |
树莓派4B学习笔记
|
文章目录
UART简介树莓派使用UART与串口屏通信串口屏简介硬件连接配置串口接口树莓派打开UART接口树莓派安装串口调试助手
编程实现wiringSerial.h Serial简介C语言实现树莓派UART与串口屏通信
总结树莓派4B入门学习笔记汇总
UART简介
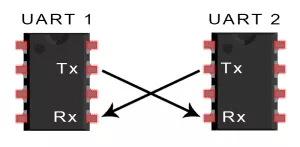
UART是一种通用串行数据总线,用于异步通信。该总线双向通信,可以实现全双工传输和接收。在嵌入式设计中,UART用来主机与辅助设备通信,如汽车音响与外接AP之间的通信,与PC机通信包括与监控调试器和其它器件,多用于上位机与下位机的通信。 在UART通信中,两个UART直接相互通信。 发送UART将控制设备(如CPU)的并行数据转换为串行形式,以串行方式将其发送到接收UART。只需要两条线即可在两个UART之间传输数据,数据从发送UART的Tx引脚流到接收UART的Rx引脚: 今天主要借助陶晶驰串口屏配合树莓派4B实现一个通信效果。 串口屏简介串口屏内置一块STM32,构建了相对独立的系统,有配套的软件能够进行图形化编程,极大地降低了界面设计的时间和难度,而且还有各种控件以便于灵活实现更多功能,可以通过串口完成对各类控件的操作,有很强的实用性。 将串口屏的TX、RX与树莓派的UART硬件接口连接,注意交叉。(没有屏幕的同学也可以使用USB转TTL连接树莓派,然后安装陶晶驰的开发环境,在线仿真也可。) 树莓派串口屏5VVCC板载编码8脚(TX)RX板载编码10脚(RX)TXGNDGND
树莓派一共有两个串口如下图所示:(来自B站树小悉) 跟之前类似,打开Serial Port,关闭Serail Console,点击OK,会提示重启。 为了验证树莓派串口有没有真的工作,需要安装一个minicom的串口助手来验证一下。 安装步骤:打开终端输入:sudo apt-get install minicom回车等待下载和安装,安装过程中有提示,直接输入Y回车。 验证了串口功能后,我们开始利用串口编程,在编程之前,根据前面的经验,我还是需要先了解一下WiringPi的串口库给我们提供了哪些可以调用的函数。 之前一直没提这个库是怎么查询的,在这里说明一下: 安装后wiringpi的库后我们可以载可以在/usr/linclude找到wiringPi相关的头文件如下图所示: wiringPi.h 基本IO驱动和常用配置定义; wiringPiI2C.h I2C驱动的头文件; wiringPiSPI.h SPI驱动的头文件; wiringSerial.h Serial驱动的头文件; 双击wiringSerial.h Serial.h,我们可以看见有以下几个函数: 此处转载的此文。 打开Geany输入以下代码: // An highlighted block #include #include #include #include #include void delay_ms(int ms); int main() { int filedevid; int recbytenum; int i; char buf[1024]; memset(buf,0,1024); wiringPiSetup(); if((filedevid=serialOpen("/dev/ttyAMA0",115200)) 1)//如果接收到 { i=0; while(recbytenum--) { buf[i++] = serialGetchar(filedevid);//读出缓存区的数据 } printf("Rpi uart recv: %s\r\n",buf);输出在终端 serialPrintf(filedevid,"Rpi uart send: %s\r\n",buf);//通过串口打印到上位机啊。 memset(buf,0,1024); } } } }上述代码效果如下: C语言代码如下: //树莓派通过串口屏输出两个通道正弦波形。 #include #include #include #include #include #define uchar unsigned char #define uint unsigned int int filedevid; int second,minute,hour,day,month,week,year,zwc,fwc,wdc,bal,txt,wendu; char endbuf[]={0xff,0xff,0xff}; char buf[64]; //唤醒屏幕准备通信 void UART_Send_start(void) { delay(10); serialPuts (filedevid,(char *)endbuf);//发送结束标志0xff,0xff,0xff包尾 delay(10); } int main() { uint ch0,ch1; signed int i,j; second=50;minute=48;hour=12;day=15;month=7;week=2;year=16;bal=0;txt=0;wendu=0; wiringPiSetup(); if((filedevid=serialOpen("/dev/ttyAMA0",9600)) |
 波特率:每秒传输二进制位数。 例:1分钟传输数据57600BYTE,帧格式10位,求波特率? 二进位:57600*10=576000/60 = 9600bit/s UART属于异步通讯,这意味着没有时钟信号,取而代之的是在数据包中添加起始和停止位。这些位定义了数据包的开始和结束,通过识别起始位和结束位可以解析出数据。 帧格式:1位起始位+(5-8)位数据+1位奇偶校验位+(1~2)位停止位 =10位 奇校验:数据位上的1的个数+校验位上1的个数和位奇数。
波特率:每秒传输二进制位数。 例:1分钟传输数据57600BYTE,帧格式10位,求波特率? 二进位:57600*10=576000/60 = 9600bit/s UART属于异步通讯,这意味着没有时钟信号,取而代之的是在数据包中添加起始和停止位。这些位定义了数据包的开始和结束,通过识别起始位和结束位可以解析出数据。 帧格式:1位起始位+(5-8)位数据+1位奇偶校验位+(1~2)位停止位 =10位 奇校验:数据位上的1的个数+校验位上1的个数和位奇数。 数据包的传输示意图:
数据包的传输示意图:  上图来自此文。 ①串口是什么? 串口就是一种通信方式(TX和RX) ②串口通信的特点 异步 全双工 串行 ③串口通信数据帧 起始位 数据位(8) 【奇偶校验】 停止位 有关串口的详细介绍参考此文。
上图来自此文。 ①串口是什么? 串口就是一种通信方式(TX和RX) ②串口通信的特点 异步 全双工 串行 ③串口通信数据帧 起始位 数据位(8) 【奇偶校验】 停止位 有关串口的详细介绍参考此文。 有关陶晶驰串口屏的具体使用可以参考官网的资料。
有关陶晶驰串口屏的具体使用可以参考官网的资料。
 这里还需要注意,树莓派的串口分为了主串口和辅助串口; (硬件串口标识符为ttyAMA0;主串口标识符为serial0;辅助串口的标识符为serial1)。本此介绍使用的是硬件串口和主串口,利用引脚通信。
这里还需要注意,树莓派的串口分为了主串口和辅助串口; (硬件串口标识符为ttyAMA0;主串口标识符为serial0;辅助串口的标识符为serial1)。本此介绍使用的是硬件串口和主串口,利用引脚通信。 
 点击Yes等待重启。
点击Yes等待重启。  重启完毕后,打开命令终端,输入ls /dev -al 回车。(若重启失败,先把串口屏拔下来,重启完毕后再接上去)
重启完毕后,打开命令终端,输入ls /dev -al 回车。(若重启失败,先把串口屏拔下来,重启完毕后再接上去)  下拉找到串口,此时发现,主串口(serial0)指向了mini串口,辅助串口(serial1)指向了硬件串口(ttyAM0);这与我们所需要将主串口指向硬件串口,所以需要进一步修改配置。
下拉找到串口,此时发现,主串口(serial0)指向了mini串口,辅助串口(serial1)指向了硬件串口(ttyAM0);这与我们所需要将主串口指向硬件串口,所以需要进一步修改配置。 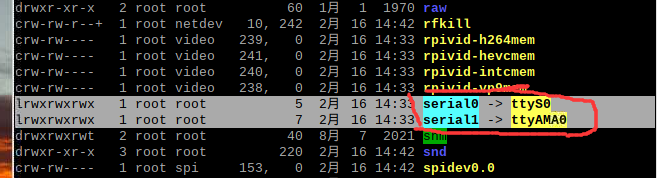 利用nano编辑器打开并修改config.txt,具体步骤如下: (1)在终端输入:sudo nano /boot/config.txt 回车,弹出下图画面,利用滚轮来到文件末尾。
利用nano编辑器打开并修改config.txt,具体步骤如下: (1)在终端输入:sudo nano /boot/config.txt 回车,弹出下图画面,利用滚轮来到文件末尾。  (2)添加如下代码: dtoverlay=pi3-miniuart-bt force_turbo=1
(2)添加如下代码: dtoverlay=pi3-miniuart-bt force_turbo=1  按Ctrl+S保存,Ctrl+X返回。 然后再次重启树莓派,输入sudo reboot 等待重启完成 再次打开终端,输入ls /dev -al 回车此时上滑找到串口发现已经修改为主串口指向硬件串口了。
按Ctrl+S保存,Ctrl+X返回。 然后再次重启树莓派,输入sudo reboot 等待重启完成 再次打开终端,输入ls /dev -al 回车此时上滑找到串口发现已经修改为主串口指向硬件串口了。 
 安装完成后需要先将USB转TTL连接到树莓派,然后打开电脑的串口调试助手,连接到CH340(波特率9600八位数据一位停止)。
安装完成后需要先将USB转TTL连接到树莓派,然后打开电脑的串口调试助手,连接到CH340(波特率9600八位数据一位停止)。  同时打开树莓派的串口助手: 在终端输入命令: minicom -D /dev/ttyAMA0 -b 9600回车即可进入。
同时打开树莓派的串口助手: 在终端输入命令: minicom -D /dev/ttyAMA0 -b 9600回车即可进入。 
 在电脑端输入abcd点击发送,可以发现在树莓派上有了显示,表示串口开启OK。此时我们需要退出minicom ,退出步骤:首先Ctrl+A,然后按Z;最后按X,选是即可退出。
在电脑端输入abcd点击发送,可以发现在树莓派上有了显示,表示串口开启OK。此时我们需要退出minicom ,退出步骤:首先Ctrl+A,然后按Z;最后按X,选是即可退出。 


 具体解释转载与此文。 extern int serialOpen (const char *device, const int baud) ;//打开串口,输入设备描述符和串口波特率,返回串口的设备ID extern void serialClose (const int fd) ;//关闭串口, extern void serialFlush (const int fd) ;//清空缓存区 extern void serialPutchar (const int fd, const unsigned char c) ;//输出一个字符 extern void serialPuts (const int fd, const char *s) ;//输出字符串 extern void serialPrintf (const int fd, const char *message, …) ;//格式化输出 extern int serialDataAvail (const int fd) ;//返回设备缓存区接收到的数据个数 extern int serialGetchar (const int fd) ;//从设备ID读取一个字符
具体解释转载与此文。 extern int serialOpen (const char *device, const int baud) ;//打开串口,输入设备描述符和串口波特率,返回串口的设备ID extern void serialClose (const int fd) ;//关闭串口, extern void serialFlush (const int fd) ;//清空缓存区 extern void serialPutchar (const int fd, const unsigned char c) ;//输出一个字符 extern void serialPuts (const int fd, const char *s) ;//输出字符串 extern void serialPrintf (const int fd, const char *message, …) ;//格式化输出 extern int serialDataAvail (const int fd) ;//返回设备缓存区接收到的数据个数 extern int serialGetchar (const int fd) ;//从设备ID读取一个字符
【本文地址】