【Tello无人机】无人机编队操作面板实现 |
您所在的位置:网站首页 › tello下载不了 › 【Tello无人机】无人机编队操作面板实现 |
【Tello无人机】无人机编队操作面板实现
|
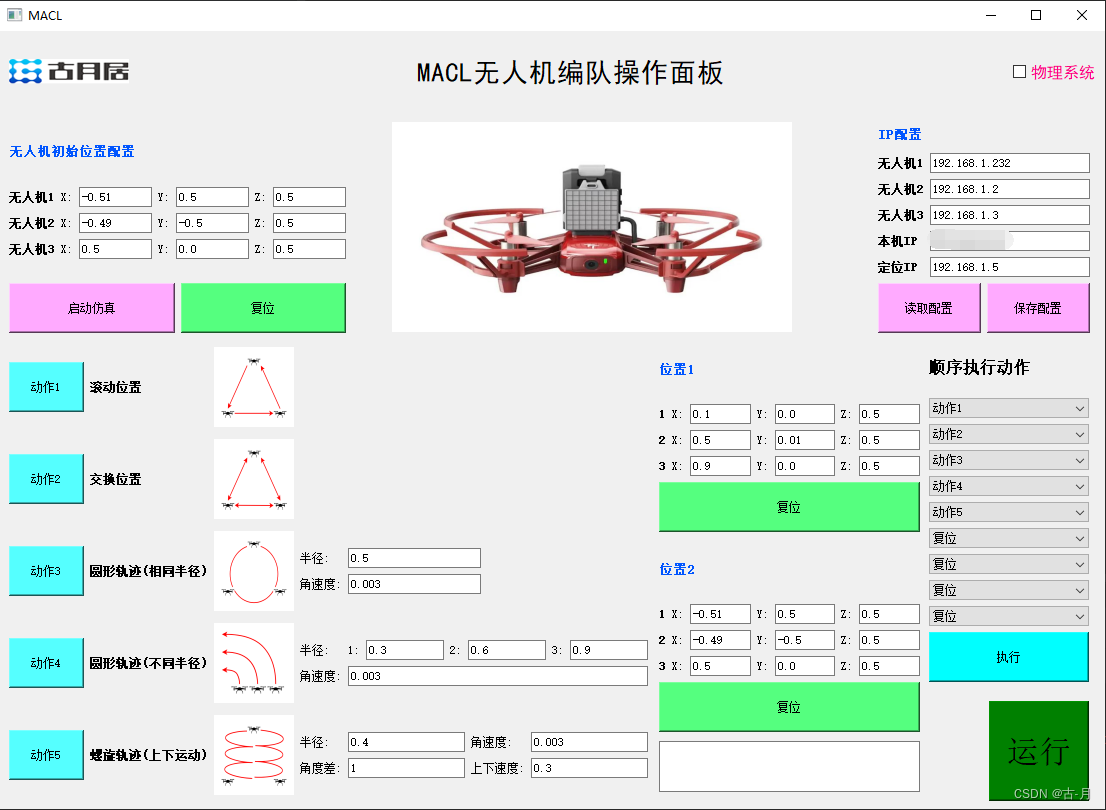
为了方便进行无人机的编队演示,以及在各种场景下实现队形的灵活切换,开发了一套专门的上位机控制平台。本文将重点介绍应用于tello无人机的编队操作面板及其核心功能。 操作面板页面 下图展示了操作面板,其中包含5种编队动作和3个可选位置设定。用户可以根据实际需求选择动作,并对动作参数进行配置。该平台嵌入了两套通讯系统:仿真系统和物理系统。用户可以在仿真环境中验证动作的合理性和安全性,然后在物理系统中进行实验。接下来将在仿真环境中介绍各个动作。
仿真动作 启动仿真 点击启动仿真,可运行嵌入系统中的pybullet组件,并初始化无人机位置如下:(复位即此位置)
位置1,一字排开,为执行动作4,动作5做准备
动作1 三个无人机滚动交换位置,实现三个无人机换位置的效果
代码实现: def shift_drone_positions(current_pos, target_position, task_stage_count): if np.all(target_position == None): target_position = current_pos if np.linalg.norm(current_pos - target_position) < 0.05: target_position = np.roll(target_position, 1, axis=0) task_stage_count += 1 return target_position, task_stage_count 逻辑: 首先检查是否有指定的目标位置,如果没有,则将目标位置设定为当前位置。计算当前位置与目标位置之间的欧几里得距离,如果小于 0.05,则执行下一步。将目标位置在坐标轴上向前滚动一个单位,模拟位置的移动。增加任务阶段计数。返回更新后的目标位置和任务阶段计数。动作2 无人机两两交换位置,同时采用CBF进行避障运动,保证运动的同时不会与其他无人机发生碰撞
代码实现: def swap_drone_positions(current_pos, target_position, swap_count): if np.all(target_position == None): target_position = current_pos new_drone_positions = np.copy(target_position) if np.linalg.norm(current_pos - target_position) < 0.05: if swap_count % 2 == 0: # 01-10 temp = copy.deepcopy(new_drone_positions[0]) new_drone_positions[0] = new_drone_positions[1] new_drone_positions[1] = temp elif swap_count % 2 == 1: # 12-21 temp = copy.deepcopy(new_drone_positions[1]) new_drone_positions[1] = new_drone_positions[2] new_drone_positions[2] = temp swap_count += 1 return new_drone_positions, swap_count 逻辑: 首先,函数检查是否有指定的目标位置,如果没有,则将目标位置设定为当前位置。然后,函数创建了一个新的数组 new_drone_positions,用于存储目标位置的副本。接着,函数计算当前位置与目标位置之间的欧几里得距离,如果小于 0.05,则执行下一步。如果 swap_count 是偶数,则执行第一个交换操作,将第一个和第二个飞行器的位置交换。如果 swap_count 是奇数,则执行第二个交换操作,将第二个和第三个飞行器的位置交换。每次执行交换操作后,增加 swap_count。最后,返回更新后的飞行器位置和增加后的交换次数 swap_count。动作3 圆形运动,三个无人机以设定的半径及角速度进行圆形机动,实现画圆的效果
代码实现: def rotational_motion(current_pos, radius=0.5, delta_theta_val=0.003, last_angle=np.zeros(3), first_call=True): current_angle = np.arctan2(current_pos[:, 1], current_pos[:, 0]) current_angle = (current_angle + 2 * np.pi) % (2 * np.pi) if first_call: first_call = False last_angle = copy.deepcopy(current_angle) delta_theta = np.array([delta_theta_val, delta_theta_val, delta_theta_val]) R = radius new_angle = last_angle + delta_theta target_x = R * np.cos(new_angle) target_y = R * np.sin(new_angle) target_position = np.array([target_x, target_y, [current_pos[0][2]] * 3]).T return target_position, np.array(new_angle), first_call 点击【Tello无人机】无人机编队操作面板实现 - 古月居可查看全文 |

【本文地址】