yolov5参数解析 |
您所在的位置:网站首页 › tdp50参数 › yolov5参数解析 |
yolov5参数解析
|
文章目录
一、模型配置文件二、超参文件三、运行过程参数解析3.1 `train.py`参数解析3.2 `detact.py`参数解析3.3 `val.py`参数解析
五、添加注意力机制
yolov5s:
img 640,adam,epoch300,obj.yaml时,40epoch内都在0.45-0.6震荡。改为voc.yaml和sgd,epoch=100时,后期0.7-0.73震荡 yolov5x:img=256.obj.yaml,0.75-0.8震荡。cache貌似没什么用
Class Images Instances P R mAP50 mAP50-95: 100% 7/7 [00:03=1.12.0的单GPU YOLOv5训练现在完全可再现local_rank:DistributedDataParallel 单机多卡训练,单GPU设备不需要设置entity:在线可视化工具wandbupload_dataset:是否上传dataset到wandb tabel,默认False 启用后,将数据集作为交互式 dsviz表 在浏览器中查看、查询、筛选和分析数据集bbox_interval:设置界框图像记录间隔 Set bounding-box image logging interval for W&B 默认-1artifact_alias:使用数据的版本
3.2 detact.py参数解析
下面是推理脚本detect.py的参数: def parse_opt(): parser = argparse.ArgumentParser() parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path or triton URL') parser.add_argument('--source', type=str, default=ROOT / 'data/images', help='file/dir/URL/glob/screen/0(webcam)') parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='(optional) dataset.yaml path') parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w') parser.add_argument('--conf-thres', type=float, default=0.25, help='confidence threshold') parser.add_argument('--iou-thres', type=float, default=0.45, help='NMS IoU threshold') parser.add_argument('--max-det', type=int, default=1000, help='maximum detections per image') parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu') parser.add_argument('--view-img', action='store_true', help='show results') parser.add_argument('--save-txt', action='store_true', help='save results to *.txt') parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels') parser.add_argument('--save-crop', action='store_true', help='save cropped prediction boxes') parser.add_argument('--nosave', action='store_true', help='do not save images/videos') parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --classes 0, or --classes 0 2 3') parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS') parser.add_argument('--augment', action='store_true', help='augmented inference') parser.add_argument('--visualize', action='store_true', help='visualize features') parser.add_argument('--update', action='store_true', help='update all models') parser.add_argument('--project', default=ROOT / 'runs/detect', help='save results to project/name') parser.add_argument('--name', default='exp', help='save results to project/name') parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment') parser.add_argument('--line-thickness', default=3, type=int, help='bounding box thickness (pixels)') parser.add_argument('--hide-labels', default=False, action='store_true', help='hide labels') parser.add_argument('--hide-conf', default=False, action='store_true', help='hide confidences') parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference') parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference') parser.add_argument('--vid-stride', type=int, default=1, help='video frame-rate stride') opt = parser.parse_args() opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand print_args(vars(opt)) return opt source:测试集文件/文件夹data:配置文件路径,和train.py里面的data是一样的conf-thres:置信度的阈值 超过这个阈值的预测框就会被预测出来。比如conf-thres参数依次设置成“0”, “0.25”,“0.8” 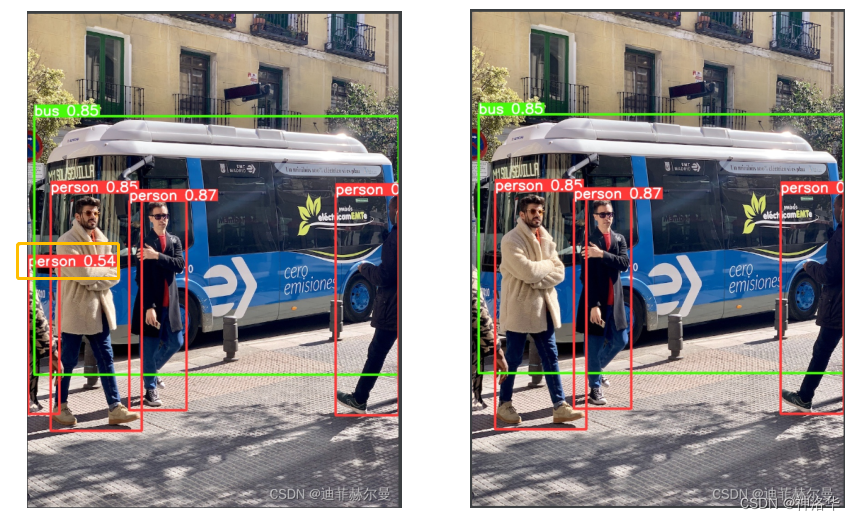 iou-thres:iou阈值 iou-thres:iou阈值
NMS步骤: 对 BBox 按置信度排序,选取置信度最高的 BBox(所以一开始置信度最高的 BBox 一定会被留下来);对剩下的 BBox 和已经选取的 BBox 计算 IOU,淘汰(抑制) IOU 大于设定阈值的 BBox(在图例中这些淘汰的 BBox 的置信度被设定为0)。重复上述两个步骤,直到所有的 BBox 都被处理完,这时候每一轮选取的 BBox 就是最后结果。 iou-thres=0.5时,NMS 只运行了两轮就选取出最终结果:第一轮选择了红色 BBox,淘汰了粉色 BBox;第二轮选择了黄色 BBox,淘汰了紫色 BBox 和青色 BBox。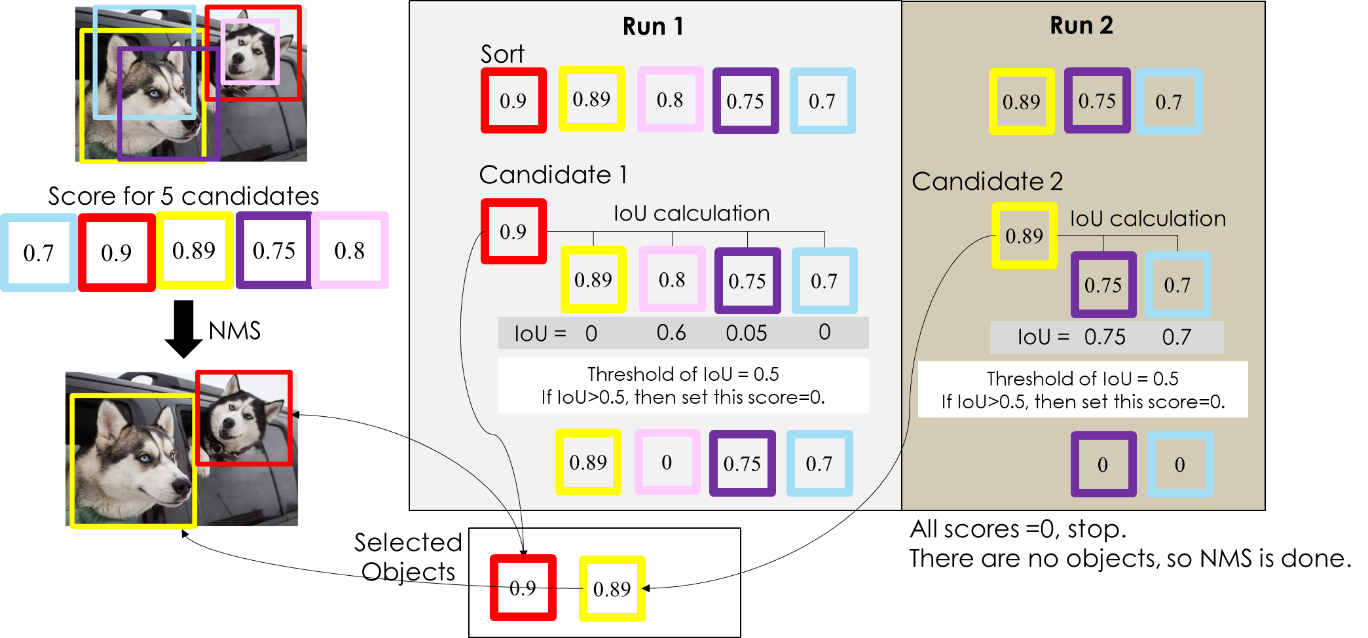 假设iou-thres=0.7,结果又是如何? 假设iou-thres=0.7,结果又是如何? 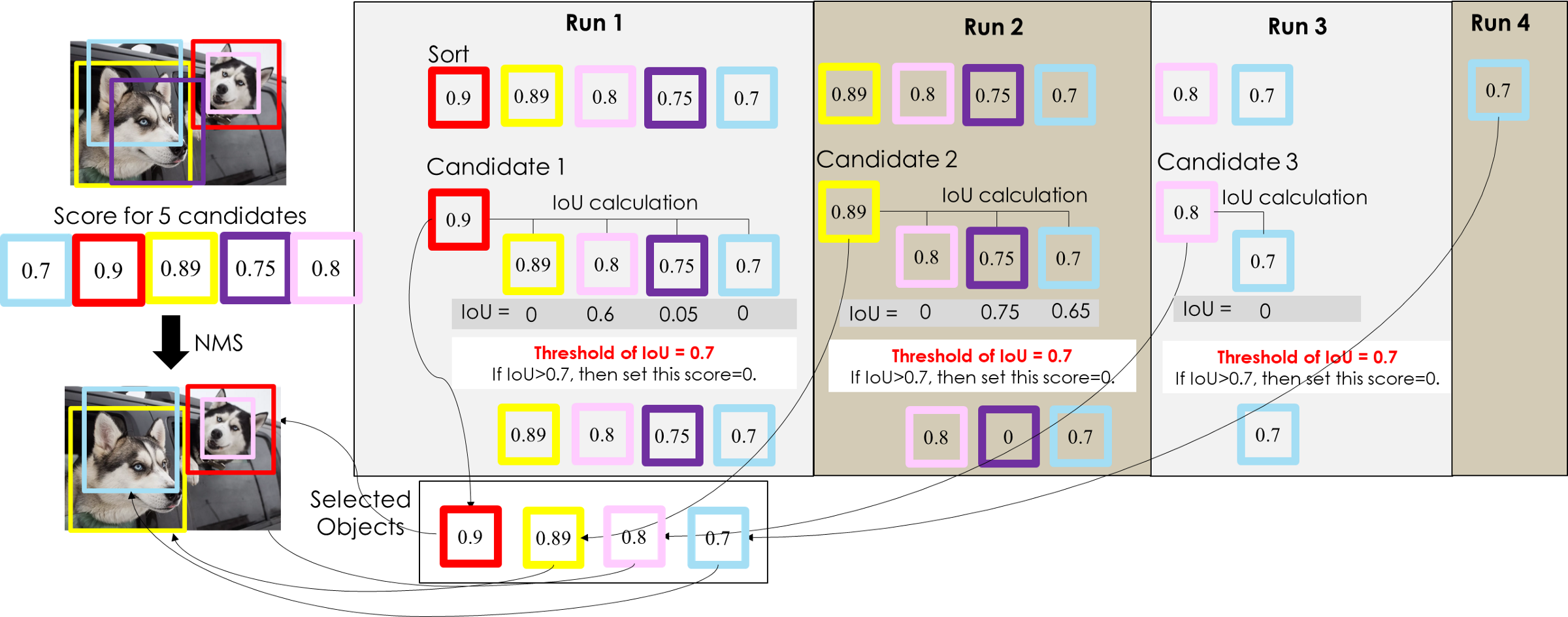 下面iou-thres分别取“0”,“0.45”,“1”
下面iou-thres分别取“0”,“0.45”,“1”  max-det:每张图最大检测数量,默认是最多检测1000个目标view-img:检测的时候是否实时的把检测结果显示出来 如果输入代码python detect.py --view-img,在检测的时候系统要把我检测的结果实时的显示出来,假如我文件夹有5张图片,那么模型每检测出一张就会显示出一张,直到所有图片检测完成。save-txt:是否把检测结果保存成一个.txt的格式 txt默认保存物体的类别索引和预测框坐标(YOLO格式),每张图一个txt,txt中每行表示一个物体save-conf:上面保存的txt中是否包含置信度save-crop:是否把模型检测的物体裁剪下来 开启了这个参数会在crops文件夹下看到几个以类别命名的文件夹,里面保存的都是裁剪下来的图片。nosave:不保存预测的结果 但是还会生成exp文件夹,只不过是一个空的exp。这个参数应该是和“–view-img”配合使用的classes:指定检测某几种类别。 比如coco128.yaml中person是第一个类别,classes指定“0”,则表示只检测图片中的person。agnostic-nms:跨类别nms 比如待检测图像中有一个长得很像排球的足球,pt文件的分类中有足球和排球两种,那在识别时这个足球可能会被同时框上2个框:一个是足球,一个是排球。开启agnostic-nms后,那只会框出一个框augment:数据增强。下面是启用前后的对比示例: max-det:每张图最大检测数量,默认是最多检测1000个目标view-img:检测的时候是否实时的把检测结果显示出来 如果输入代码python detect.py --view-img,在检测的时候系统要把我检测的结果实时的显示出来,假如我文件夹有5张图片,那么模型每检测出一张就会显示出一张,直到所有图片检测完成。save-txt:是否把检测结果保存成一个.txt的格式 txt默认保存物体的类别索引和预测框坐标(YOLO格式),每张图一个txt,txt中每行表示一个物体save-conf:上面保存的txt中是否包含置信度save-crop:是否把模型检测的物体裁剪下来 开启了这个参数会在crops文件夹下看到几个以类别命名的文件夹,里面保存的都是裁剪下来的图片。nosave:不保存预测的结果 但是还会生成exp文件夹,只不过是一个空的exp。这个参数应该是和“–view-img”配合使用的classes:指定检测某几种类别。 比如coco128.yaml中person是第一个类别,classes指定“0”,则表示只检测图片中的person。agnostic-nms:跨类别nms 比如待检测图像中有一个长得很像排球的足球,pt文件的分类中有足球和排球两种,那在识别时这个足球可能会被同时框上2个框:一个是足球,一个是排球。开启agnostic-nms后,那只会框出一个框augment:数据增强。下面是启用前后的对比示例: 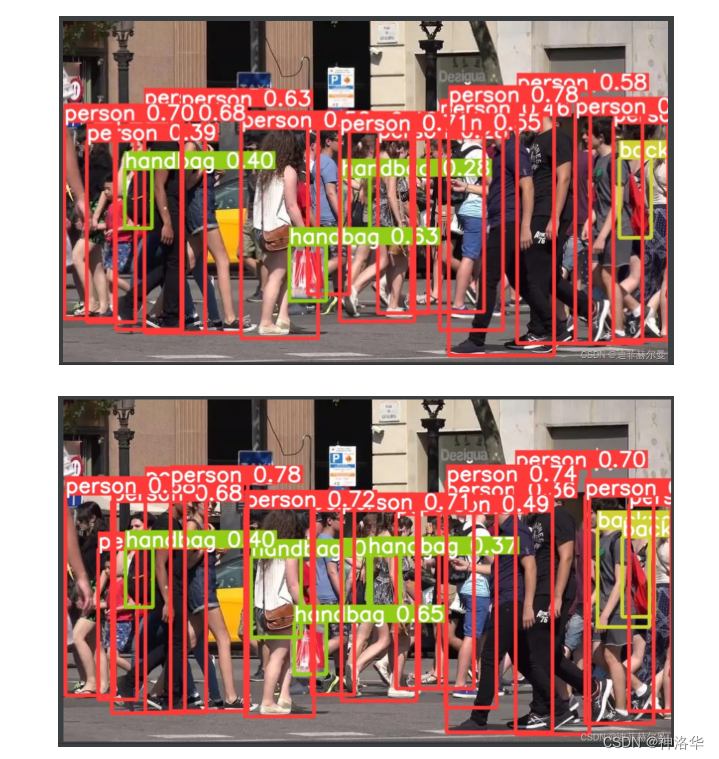 visualize:是否可视化特征图。 如果开启了这和参数可以看到exp文件夹下又多了一些文件,这里.npy格式的文件就是保存的模型文件,可以使用numpy读写。还有一些png文件。下面来看一下保存下来的特征图:
stage0: visualize:是否可视化特征图。 如果开启了这和参数可以看到exp文件夹下又多了一些文件,这里.npy格式的文件就是保存的模型文件,可以使用numpy读写。还有一些png文件。下面来看一下保存下来的特征图:
stage0: 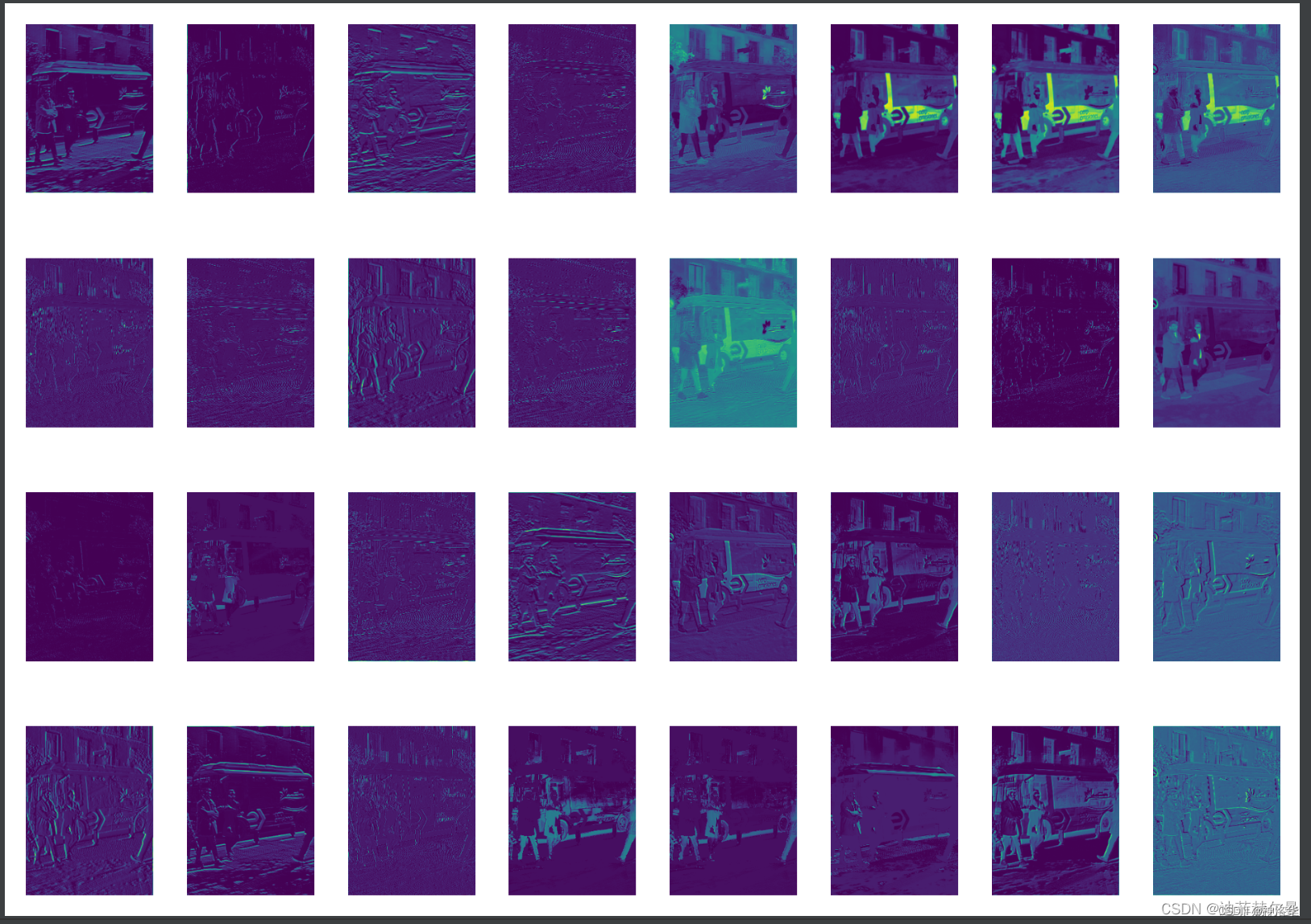 stage6: stage6: 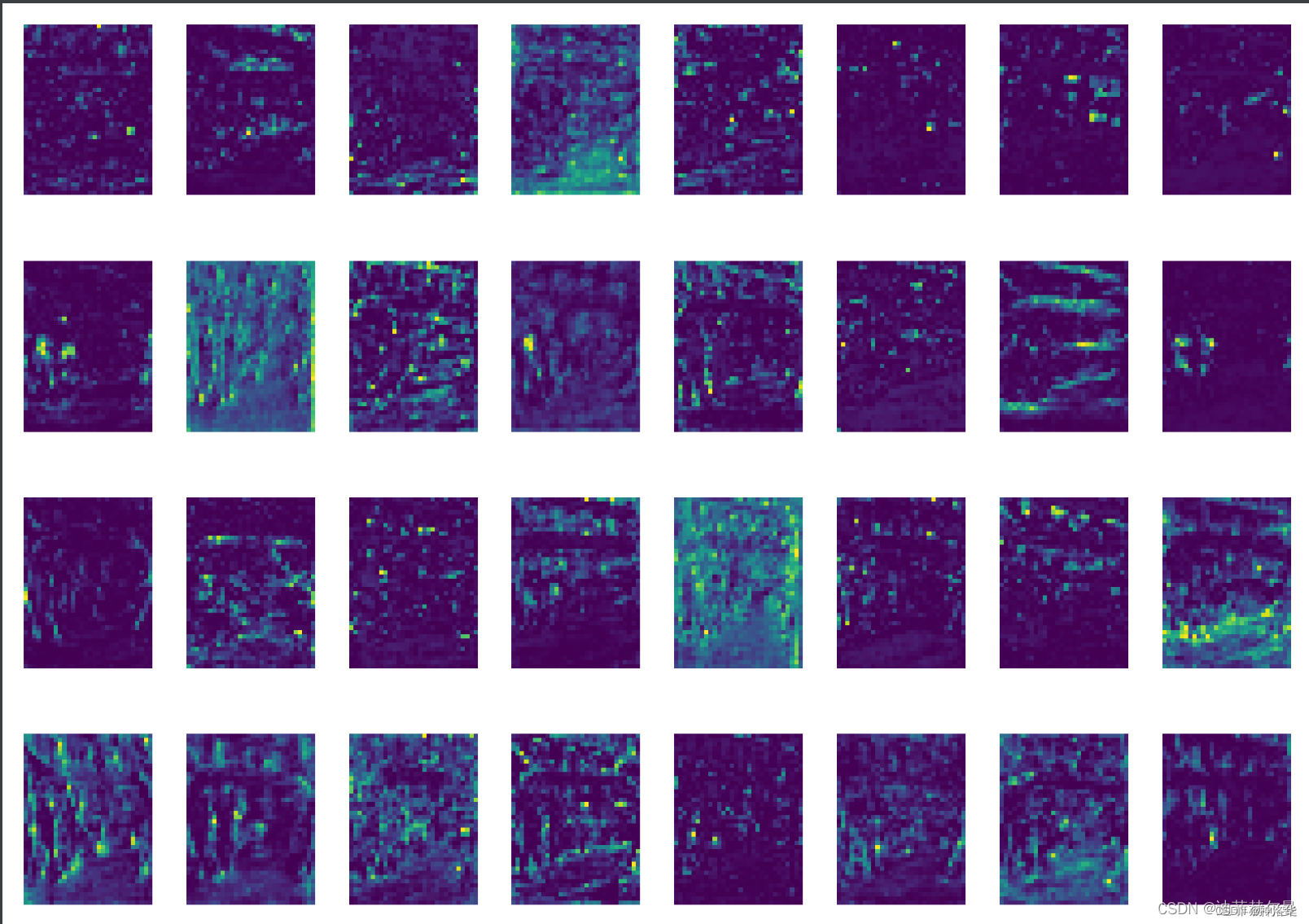 stage23: stage23: 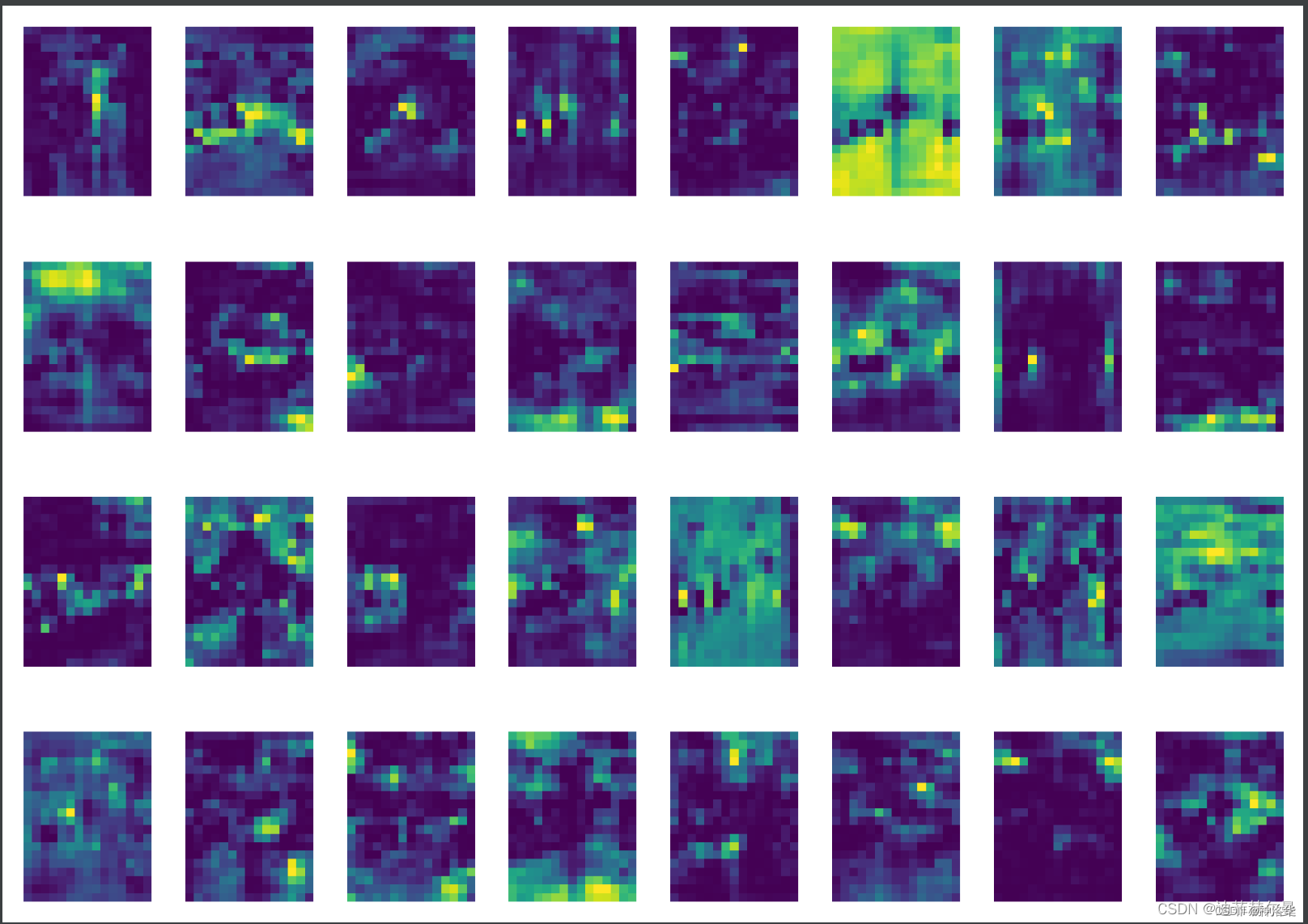 update:如果指定这个参数,则对所有模型进行strip_optimizer操作,去除pt文件中的优化器等信息project:预测结果保存的路径name:预测结果保存文件夹名exist-ok:每次预测模型的结果是否保存在原来的文件夹 如果指定了这个参数的话,那么本次预测的结果还是保存在上一次保存的文件夹里;如果不指定就是每次预测结果保存一个新的文件夹下line-thickness:调节预测框线条粗细的,default=3 因为有的时候目标重叠太多会产生遮挡,比如python detect.py --line-thickness 10 update:如果指定这个参数,则对所有模型进行strip_optimizer操作,去除pt文件中的优化器等信息project:预测结果保存的路径name:预测结果保存文件夹名exist-ok:每次预测模型的结果是否保存在原来的文件夹 如果指定了这个参数的话,那么本次预测的结果还是保存在上一次保存的文件夹里;如果不指定就是每次预测结果保存一个新的文件夹下line-thickness:调节预测框线条粗细的,default=3 因为有的时候目标重叠太多会产生遮挡,比如python detect.py --line-thickness 10  hide-labels:隐藏预测图片上的标签(只有预测框)hide-conf:隐藏置信度(还有预测框和类别信息,但是没有置信度)half:是否使用 FP16 半精度推理。 在training阶段,梯度的更新往往是很微小的,需要相对较高的精度,一般要用到FP32以上。在inference的时候,精度要求没有那么高,一般F16(半精度)就可以,甚至可以用INT8(8位整型),精度影响不会很大。同时低精度的模型占用空间更小了,有利于部署在嵌入式模型里面。dnn:是否使用 OpenCV DNN 进行 ONNX 推理。
3.3 val.py参数解析 hide-labels:隐藏预测图片上的标签(只有预测框)hide-conf:隐藏置信度(还有预测框和类别信息,但是没有置信度)half:是否使用 FP16 半精度推理。 在training阶段,梯度的更新往往是很微小的,需要相对较高的精度,一般要用到FP32以上。在inference的时候,精度要求没有那么高,一般F16(半精度)就可以,甚至可以用INT8(8位整型),精度影响不会很大。同时低精度的模型占用空间更小了,有利于部署在嵌入式模型里面。dnn:是否使用 OpenCV DNN 进行 ONNX 推理。
3.3 val.py参数解析
val.py的作用: 我们在训练结束后会打印出每个类别的一些评价指标,但是如果当时忘记记录,那么我们就可以通过这个文件再次打印这些评价指标可以打印出测试集评价指标,测试集的图片也是需要标注的。 def parse_opt(): parser = argparse.ArgumentParser() parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='dataset.yaml path') parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)') parser.add_argument('--batch-size', type=int, default=32, help='batch size') parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='inference size (pixels)') parser.add_argument('--conf-thres', type=float, default=0.001, help='confidence threshold') parser.add_argument('--iou-thres', type=float, default=0.6, help='NMS IoU threshold') parser.add_argument('--max-det', type=int, default=300, help='maximum detections per image') parser.add_argument('--task', default='val', help='train, val, test, speed or study') parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu') parser.add_argument('--workers', type=int, default=8, help='max dataloader workers (per RANK in DDP mode)') parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset') parser.add_argument('--augment', action='store_true', help='augmented inference') parser.add_argument('--verbose', action='store_true', help='report mAP by class') parser.add_argument('--save-txt', action='store_true', help='save results to *.txt') parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt') parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels') parser.add_argument('--save-json', action='store_true', help='save a COCO-JSON results file') parser.add_argument('--project', default=ROOT / 'runs/val', help='save to project/name') parser.add_argument('--name', default='exp', help='save to project/name') parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment') parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference') parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference') opt = parser.parse_args() opt.data = check_yaml(opt.data) # check YAML opt.save_json |= opt.data.endswith('coco.yaml') opt.save_txt |= opt.save_hybrid print_args(vars(opt)) return opt前六个参数和detect.py意义一样。 task:可以是train, val, test。比如:python val.py --task test表示打印测试集指标augment:测试是否使用TTA Test Time Augment,指定这个参数后各项指标会明显提升几个点。verbose:是否打印出每个类别的mAP,默认False。save-hybrid:将标签+预测混合结果保存到 .txtsave-json:是否按照coco的json格式保存预测框,并且使用cocoapi做评估(需要同样coco的json格式的标签) 默认Falsehalf:是否使用半精度推理 默认False其它参数内容同detect.py。 五、添加注意力机制 参考《手把手带你Yolov5 (v6.1)添加注意力机制(一)(并附上30多种顶会Attention原理图)》参考《手把手带你Yolov5 (v6.1)添加注意力机制(二)(在C3模块中加入注意力机制)》 Epoch GPU_mem box_loss obj_loss cls_loss Instances Size 98/99 3.81G 0.03403 0.0175 0.002002 72 256: 100% 75/75 [00:29 |
【本文地址】
今日新闻 |
推荐新闻 |