SolidWorks Motion冗余约束和运动算例报错分析 |
您所在的位置:网站首页 › swmotion分析 › SolidWorks Motion冗余约束和运动算例报错分析 |
SolidWorks Motion冗余约束和运动算例报错分析
|
柯治成
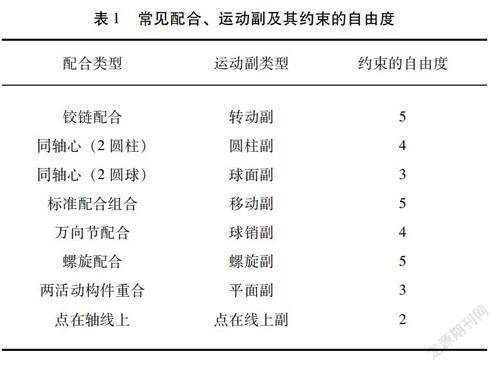
关键词:SolidWorks Motion;自由度;冗余约束;报错分析 0引言 机构的运动分析是了解机械运动性能的必要手段,传统机械设计常采用理论力学的方法计算运动学或动力学特性,这种方法对复杂机构具有局限性。 目前随着CAE技术的飞速发展,虚拟样机仿真工具SolidWorks Motion得到了广泛应用。其借助工业动态仿真分析软件ADAMS的求解器来分析装配体的复杂行为,可与SolidWorks三维建模实现无缝集成,并通过约束映射将零件之间的配合(约束)自动映射为Motion中的连接,节约运动分析时间。鉴于传统机械设计的局限性和ADAMS软件建模、实操性差的缺点,同时结合现代机械产品开发要求,应用solidWorks Motion就能对虚拟样机进行运动学和动力学分析,易学易用。可在设计前期判断设计是否达到预期目标,有利于缩短产品开发周期,增强市场竞争力。 1约束方程及自由度计算 空间中未受约束的刚性实体具有6个自由度。当两个刚性实体之间添加配合时,每个配合都将移除实体之间一定数量的自由度,限制了部件间的相对运动。solidWorks Motion中的约束通过在微分一代数方程(Differential and A1gebmic equalions,DAE)的控制系统中添加代数约束方程,从系统中移除自由度(DOF)。代数方程描述被配合约束的自由度,以“i”标记在第一个零件上,“j”标记在第二个零件上。 常见配合、运动副及其约束的自由度如表1所示。 根据Gruebler自由度的估算值判断系统是否过约束:如果Gruebler>0,模型为欠约束(动力学);如果Gruebler=0,模型为全约束(运动学);如果Gruebler |
【本文地址】
今日新闻 |
推荐新闻 |