【STM32Cube笔记】14 |
您所在的位置:网站首页 › stm32上升沿触发中断 › 【STM32Cube笔记】14 |
【STM32Cube笔记】14
|
【STM32Cube笔记】系列文章目录
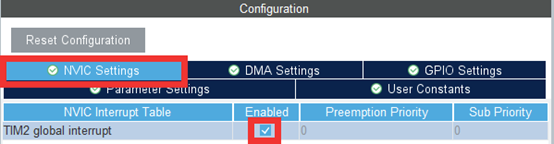
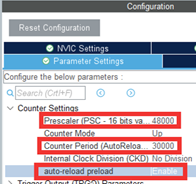
1-基于STM32的VSCode入门级教程前言 2-STM32Cube安装教程 3-STM32CubeIDE汉化 4-STM32Cube配置时钟设置 5-跑马灯引脚配置 6-Cortex-M7内核基本配置 7-新建用于储存代码的文件夹以及c/h文件 8-STM32CubeIDE点亮跑马灯 9-STLink调试 10-异步串口收发USART 11-中断控制器NVIC 12-配置外部中断 13-使用定时器产生PWM输出 14-使用定时器捕获上升/下降沿 15-数模转换AD/DA 16-STM32Cube个性化定制 7.5 使用定时器捕获上升/下降沿7.5.1 配置输入捕获中断引脚 点击“Timers”并选择“TIM2”-“Channel1”将定时器2的通道1选为“Input Capture dirct mode”,使其连接至开发板上的“KEY_UP”按钮。在下方的配置栏中将分频数设为480,得到1MHZ的频率,也就是1us记一次,点击“Counter Period”,再点击右边的齿轮设置,将表达形式设成Hex格式,再将“Counter Period”设置为0xffffffff,这样就支持32位的定时器输入捕获了(部分引脚达不到只能16位)。将捕获方式设为“UP”上升沿捕获,开启自动重置,并将最底下一栏滤波值改为8。 在“ NVIC Settings”中将使能中断打开。 同时进入“GPIO Settings”将该输入捕获引脚设为下拉,保证无信号时能稳定低电平。 接着我们需要再设置一个定时器去隔3秒来统计定时器2捕获到的高电平数。
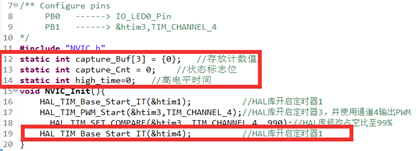
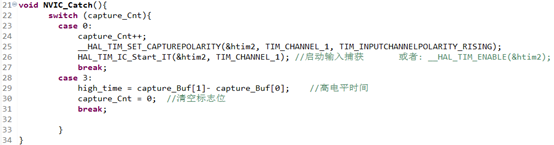
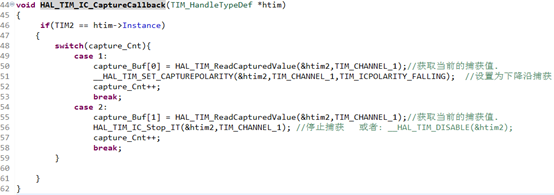
将定时器4设为普通定时器来读取捕获数量,分频数为48000得到10KHZ频率,计数30000为3秒,同时开启自动重载防止溢出。同时在“NVIC Setting”中开启全局中断。 7.5.2 配置串口传输数据 接下来对串口进行配置,将“USART1”打开。并开启USART1全局中断。 同时进入“NVIC”中断时序管理页面中,将“USART1”的中断优先度取到3。 同时找到PA9和PA10将它们设置为USART1的RXD和TXD引脚,方便USB读取。 点击保存并生成代码。 7.5.3 配置定时器捕获代码 首先我们需要重新到“NVIC.h”中添加“usart.h”以及printf和定时器捕获函数的声名。 接着到“NVIC.c”文件中添加一些用于储存定时器捕获的缓存变量,并在“NVIC_Init”函数中添加定时器4的初始化用于3秒反馈一次数值。 同时添加新的“NVIC_Catch”函数用于在main函数中开启定时器中断并反馈数值。 在定时器反馈函数“HAL_TIM_PeriodElapsedCallback”中添加定时器4的反馈值,使其3秒向串口传输一次数据。 接着再添加一个输入捕获到上升沿的回调函数“HAL_TIM_IC_CaptureCallback”用于对捕获的上升沿信息进行处理并储存至缓存数组中。 最后别忘了在Main函数中添加”NVIC_Catch”。 将程序烧录 至单片机后,将USB MINI线从ST-Link拔下来并连接串口。 由于选用的定时器2通道1串联了按键至3.3V,因此在打开串口后,按“KEY_UP”按键即可手动制造一个上升沿给单片机,并在串口中显示出来。 7.5.4 定时器捕获函数介绍 __HAL_TIM_SET_CAPTUREPOLARITY不是函数,而是底层操作的一个宏定义 在stm32H7xx_hal_tim.h文件中找到。其作用是修改定时器某一通道的输入捕获极性 其中有两个函数,第一个为清除清除原来的捕获极性,第二个为设置通道捕捉极性 等价于: TIM_RESET_CAPTUREPOLARITY(&TIM2_Handler,TIM_CHANNEL_1); //清除原来的捕获极性 TIM_SET_CAPTUREPOLARITY(&TIM2_Handler,TIM_CHANNEL_1,TIM_ICPOLARITY_FALLING);//定时器5通道1设置为下降沿捕获(重设捕获极性) 在修改定时器某一通道的输入捕获极性时,一定要先清除该通道之前捕获极性 __HAL_TIM_GET_COMPARE也是一个宏定义。 在stm32H7xx_hal_tim.h文件中找到。其作用是获取定时器某一通道的捕获寄存器值 等价于 : HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1); 两者都是直接读取对应CCRx寄存器的值。附上程序源码: #include "main.h" #include "tim.h" #include "gpio.h" #include "usart.h" #include "stdio.h" // 重定向printf start __attribute__((weak)) int _write(int file, char *ptr, int len) { if(HAL_UART_Transmit(&huart1,ptr,len,0xffff) != HAL_OK) { Error_Handler(); } } // 重定向printf end void NVIC_Catch(void); void NVIC_Init(void); #include "NVIC.h" static int capture_Buf[3] = {0}; //存放计数值 static int capture_Cnt = 0; //状态标志位 static int high_time=0; //高电平时间 void NVIC_Init(){ HAL_TIM_Base_Start_IT(&htim1); //HAL库开启定时器1 HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_4);//HAL库开启定时器3,并使用通道4输出PWM __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_4, 990);//HAL库修改占空比至99% HAL_TIM_Base_Start_IT(&htim4); //HAL库开启定时器1 } void NVIC_Catch(){ switch (capture_Cnt){ case 0: capture_Cnt++; __HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING); HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1); //启动输入捕获 或者: __HAL_TIM_ENABLE(&htim2); break; case 3: high_time = capture_Buf[1]- capture_Buf[0]; //高电平时间 capture_Cnt = 0; //清空标志位 break; } } void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { //中断回调函数 if (htim->Instance == htim1.Instance) { //判断是哪个定时器产生中断 HAL_GPIO_TogglePin(IO_LED0_GPIO_Port, IO_LED0_Pin); //HAL库控制IO_LED0电平反转 { if(TIM2 == htim->Instance) { switch(capture_Cnt){ case 1: capture_Buf[0] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值. __HAL_TIM_SET_CAPTUREPOLARITY(&htim2,TIM_CHANNEL_1,TIM_ICPOLARITY_FALLING); //设置为下降沿捕获 capture_Cnt++; break; case 2: capture_Buf[1] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);//获取当前的捕获值. HAL_TIM_IC_Stop_IT(&htim2,TIM_CHANNEL_1); //停止捕获 或者: __HAL_TIM_DISABLE(&htim2); capture_Cnt++; break; } } } |












【本文地址】
今日新闻 |
推荐新闻 |