Kalibr使用:imu+camera联合标定过程详解 |
您所在的位置:网站首页 › srvo062报警消除后显示零点标定结果未更新 › Kalibr使用:imu+camera联合标定过程详解 |
Kalibr使用:imu+camera联合标定过程详解
Kalibr使用:imu+camera联合标定过程详解
 Mr Qin
分类:建图导航
个人专栏:ROS 发布时间 2021.08.13阅读数 14099 评论数 2
文章目录
Mr Qin
分类:建图导航
个人专栏:ROS 发布时间 2021.08.13阅读数 14099 评论数 2
文章目录
前言 标定过程 双目相机标定 imu标定 imu+双目联合标定 前言标定的目的是获取双目参数,imu参数以及二者直接之间的转换矩阵,分为三个阶段: 1双目标定获取双目相机内参以及双目直接的转换矩阵, 2 imu标定获取噪声密度、随机游走, 3 imu+双目联合标定获取imu与双目之间的转换矩阵。 需要用到的知识包括(ros的基本操作:工作空间与功能包,rosbag记录数据集; 相机模型;) 标定过程: 双目相机标定 双目标定采用Kalibr标定工具 1. 首先创建一个新的ros的工作空间,命名为kalibr_ws,将Kalibr的源码(功能包)下载到src文件夹下,用catkin_make命令进行编译。 2. 下载标定板,里面有三种类型的标定板(Aprilgrid, Checkerboard, Circlegrid). 由于Aprilgrid能提供序号信息, 能够防止姿态计算时出现跳跃的情况, 所以建议采用Aprilgrid进行标定. 3. 下载例子,包括一个Multiple camera calibration(多相机标定)和一个IMU-camera calibration(imu+相机联合标定),这里我们先用前者标定相机,里面包括相机参数文件camchain.yaml标定结果文件target.yaml,录制的数据集.bag文件 4. 录制.bag数据集 为了之后imu和相机联合标定,这里我们采集双目何imu的数据。 如果你已经有了通过 ROS 发布 image 和imu消息的节点, 我们只需要使用 rosbag record 工具将拍摄到的标定板图像制作成 bag 文件就行了. 注意: 通常设备采集的频率为 20-60 hz, 这会使得标定的图像过多, 而导致计算量太大. 最好将ros topic的频率降低到4hz左右进行采集. ROS 提供了改变 topic 发布频率的节点throttle, 分别打开两个终端,运行y以下命令以更改图片发布的频率 : rosrun topic_tools throttle messages /mynteye/left/image_raw 4.0 /left rosrun topic_tools throttle messages /mynteye/right/image_raw 4.0 /right其中/mynteye/left/image_raw和messages /mynteye/right为原始的话题名称,/left和/right为更改频率后的话题名称然后就可以制作bag了,具体方法参考视频 rosbag record -O stereo_calibra.bag /left /right /imu5.运行标定程序 进入下载的例子Multiple camera calibration文件夹下,修改camchain.yaml文件中的内容,包括话题名称,频率等信息,标定板尺寸信息(视频里已经讲解的很清楚了) 打开一个终端,首先source一下,然后输入命令(注意路径) source devel/setup.bash rosrun kalibr kalibr_calibrate_cameras --bag /home/heyijia/stereo_calibra.bag --topics /left /right --models pinhole-equi pinhole-equi --target /home/heyijia/april_6x6_80x80cm_A0.yaml内容包括–bag(数据集 bag文件) --topics (相机话题)–models (相机模型)–target(参数输出文件) 6. 标定结果: 标定完的参数储存在了.yaml文件里,主要包括相机内参、畸变参数、基线等内容。 cam0: cam_overlaps: [1] camera_model: pinhole distortion_coeffs: [0.2783471016021346, 0.6964790605940689, -1.7636165117280103, 1.9185066948675424] distortion_model: equidistant intrinsics: [464.46660755800724, 465.36764628863784, 345.1018538803555, 229.48918054311704] resolution: [640, 480] rostopic: /left cam1: T_cn_cnm1: - [0.9996465213666637, -0.02537787899957037, 0.007924366031799834, -0.11251195025612559] - [0.02547649136646326, 0.9995959921960228, -0.012601617884125324, -0.0017042839059835384] - [-0.0076013621922192826, 0.012799048524251695, 0.9998891956860474, -0.0005072054140188229] - [0.0, 0.0, 0.0, 1.0] cam_overlaps: [0] camera_model: pinhole distortion_coeffs: [0.2682739040565608, 0.7579325851647005, -2.0708675842774156, 2.3962970091118696] distortion_model: equidistant intrinsics: [461.8506067496413, 462.2467047389745, 325.2758830849641, 247.10152372631737] resolution: [640, 480] rostopic: /right
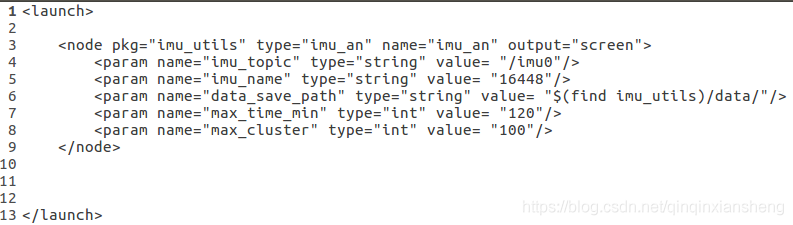
imu标定imu标定采用imu_utils1. 安装依赖项 sudo apt-get install libdw-dev2 .下载imu_utils和code_utils并放入工作空间进行编译 imu_utils下载地址为:https://github.com/gaowenliang/imu_utilscode_utils下载地址为: https://github.com/gaowenliang/code_utils 需要注意的是: 1 在此之前需要安装Ceres库 2先创建一个工作空间(这里为imu_ws),将code_utils放到src文件夹下编译,通过后再将imu_utils放到src文件夹下编译,不能一起编译,因为后者依赖于前者sudo apt-get install libdw-dev 3. 编译报错1 code_utils-master/src/sumpixel_test.cpp:2:24: fatal error: backward.hpp:No such file or directory在code_utils下面找到sumpixel_test.cpp,修改#include "backward.hpp"为 #include “code_utils/backward.hpp”,再编译**3. 编译报错 **执行sudo apt-get install ros-kinetic-bfl过程中无法定位包(找不到链接了,回来补上,按照ubuntu无法定位包的问题来搜索) 4. 录制imu.bag 保持IMU静止不动至少两个小时,录制IMU的bag rosbag record /imu -O imu5. 根据需求修改launch文件 根据自己的需求对src/imu_utils-master/launch文件进行修改:主要包括名字、时长之类的; 比如: mynt_imu.launch
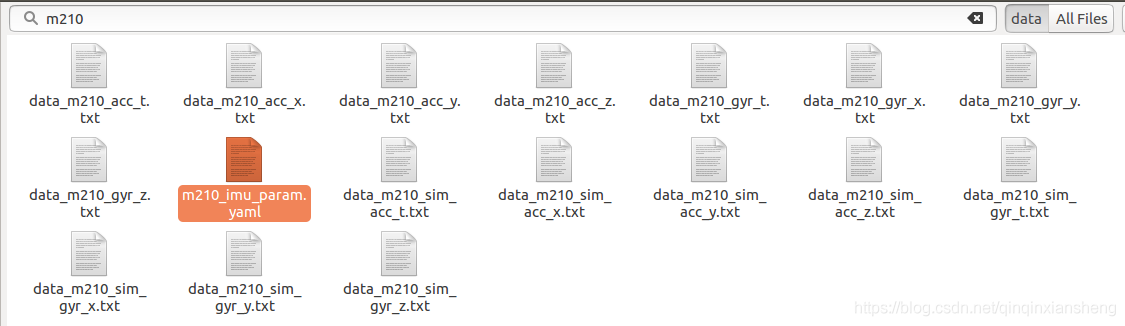
6. 运行标定程序运行bag文件 roscore rosbag play -r 200 imu_utils/imu.bag运行launch文件 cd imu_ws source ./devel/setup.bash roslaunch imu_utils mynt_imu.launch其中 -r 200是指200速播放bag数据,不可能真等两个小时2333333333333 7. 标定结果 标定完成后,可在data文件中找到对应的yaml文件src/imu_utils/data/m210_imu_param.yaml
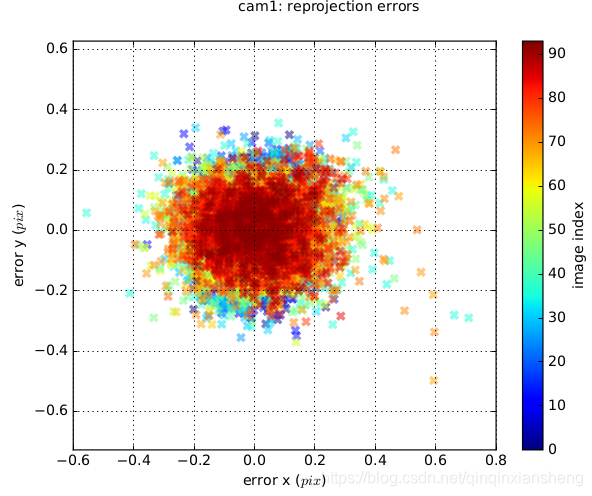
标定好的参数包括各方向的随机噪声与随机游走,如下所示: %YAML:1.0 --- type: IMU name: m210 Gyr: unit: " rad/s" avg-axis: gyr_n: 1.1016440992489866e-03 gyr_w: 5.7968344392887427e-06 x-axis: gyr_n: 1.2601308952358316e-03 gyr_w: 6.6549144466689008e-06 y-axis: gyr_n: 9.1639862355727669e-04 gyr_w: 4.5920115983527386e-06 z-axis: gyr_n: 1.1284027789538512e-03 gyr_w: 6.1435772728445881e-06 Acc: unit: " m/s^2" avg-axis: acc_n: 5.1380013730273288e-02 acc_w: 1.7544697355051581e-03 x-axis: acc_n: 3.1145378555559291e-02 acc_w: 2.9961069437766212e-03 y-axis: acc_n: 7.0380818146931270e-02 acc_w: 1.9377334256450410e-03 z-axis: acc_n: 5.2613844488329294e-02 acc_w: 3.2956883709381275e-04 imu+双目联合标定与kalibr标定双目的过程类似,这次在IMU-camera calibration例子的基础上标定imu与camera首先以上两次标定结果修改.yaml参数,包括标定结果,话题类型,频率等信息运行命令进行标定 kalibr_calibrate_imu_camera --target april_6x6.yaml --cam camchain.yaml --imu imu_adis16448.yaml --bag /home/dji/db/stero_dji_kalibr/stereo/imu_stereo_subset.bag --bag-from-to 5 45运行时需要注意路径 标定结果: .txt文件中的部分结果,最重要的是相机与imu之间的变换矩阵 Calibration results =================== Normalized Residuals ---------------------------- Reprojection error (cam0): mean 0.126389437034, median 0.117608381877, std: 0.0673478862055 Reprojection error (cam1): mean 0.132576172002, median 0.12130080264, std: 0.0739372479366 Gyroscope error (imu0): mean 0.000146638755352, median 3.16696236165e-07, std: 0.0014737840839 Accelerometer error (imu0): mean 1.14000452874e-06, median 1.02723705118e-08, std: 6.0143590628e-06 Residuals ---------------------------- Reprojection error (cam0) [px]: mean 0.126389437034, median 0.117608381877, std: 0.0673478862055 Reprojection error (cam1) [px]: mean 0.132576172002, median 0.12130080264, std: 0.0739372479366 Gyroscope error (imu0) [rad/s]: mean 5.18446291471e-06, median 1.11969028084e-08, std: 5.21061359864e-05 Accelerometer error (imu0) [m/s^2]: mean 8.06104932854e-08, median 7.26366284774e-10, std: 4.2527940778e-07 Transformation (cam0): ----------------------- T_ci: (imu0 to cam0): [[-0.02093225 -0.99971259 0.01168657 -0.00021865] [ 0.13518962 -0.01441203 -0.99071492 -0.00086208] [ 0.99059861 -0.01915798 0.13545244 0.00014753] [ 0. 0. 0. 1. ]] T_ic: (cam0 to imu0): [[-0.02093225 0.13518962 0.99059861 -0.00003417] [-0.99971259 -0.01441203 -0.01915798 -0.00022818] [ 0.01168657 -0.99071492 0.13545244 -0.00087151] [ 0. 0. 0. 1. ]] timeshift cam0 to imu0: [s] (t_imu = t_cam + shift) 0.000336885304337
打赏 0 点赞 1 收藏 2 分享 微信 微博 QQ 图片 上一篇:ROS入门:ORB_Slam2踩坑,RGBD无法获取数据 下一篇:ROS入门:GPS坐标转换&Rviz显示轨迹 |

【本文地址】
今日新闻 |
推荐新闻 |