水下机器人双机械手系统动态建模与控制仿真(Matlab代码实现) |
您所在的位置:网站首页 › solidworks运动仿真总结 › 水下机器人双机械手系统动态建模与控制仿真(Matlab代码实现) |
水下机器人双机械手系统动态建模与控制仿真(Matlab代码实现)
|
👨🎓个人主页:研学社的博客 💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭:行百里者,半于九十。 📋📋📋本文目录如下:🎁🎁🎁 目录 💥1 概述 📚2 运行结果 🎉3 参考文献 👨💻4 Matlab代码
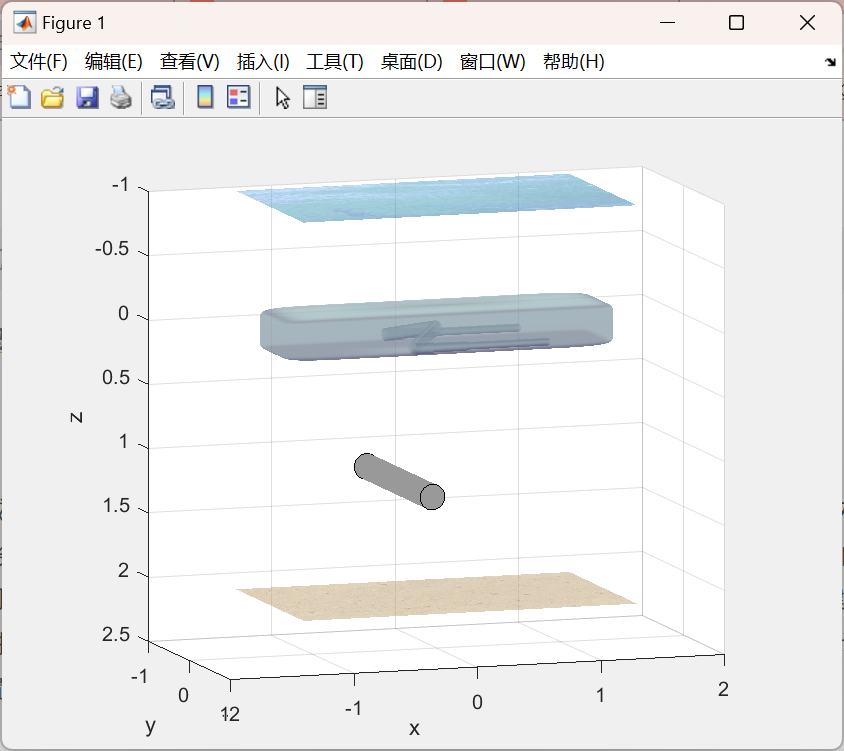
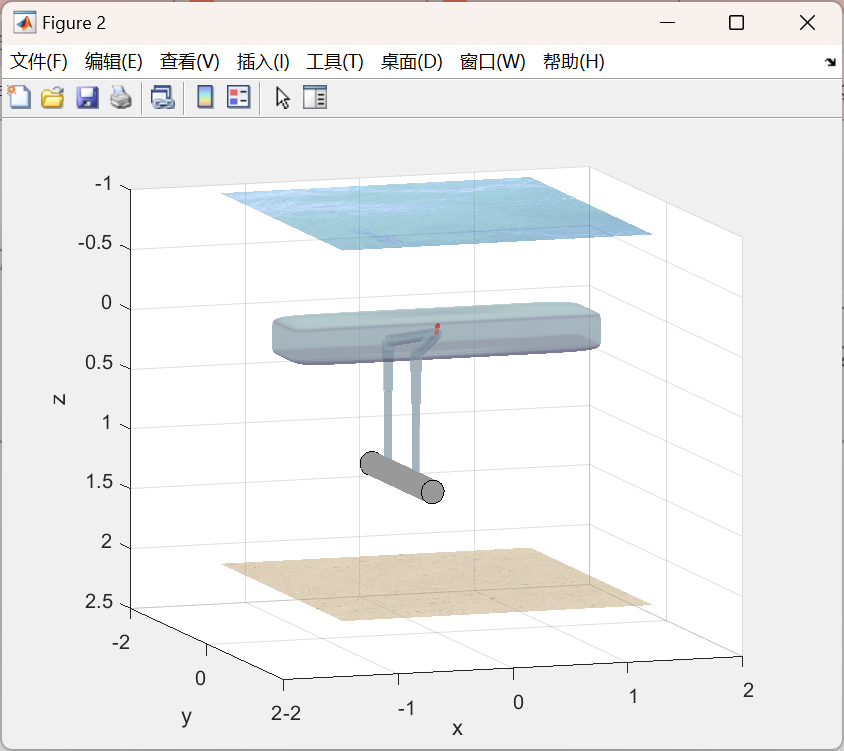
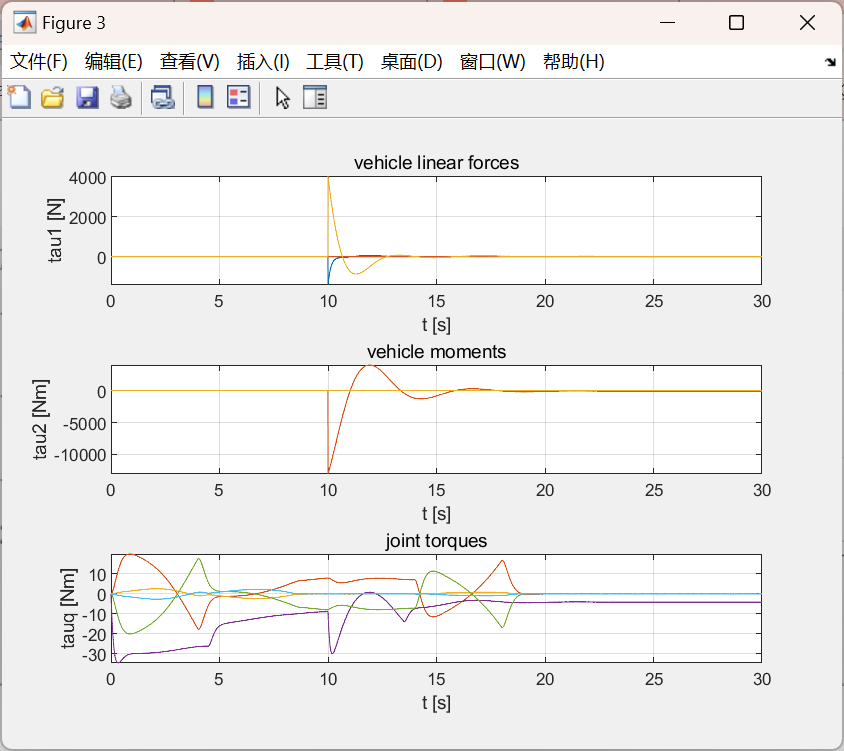
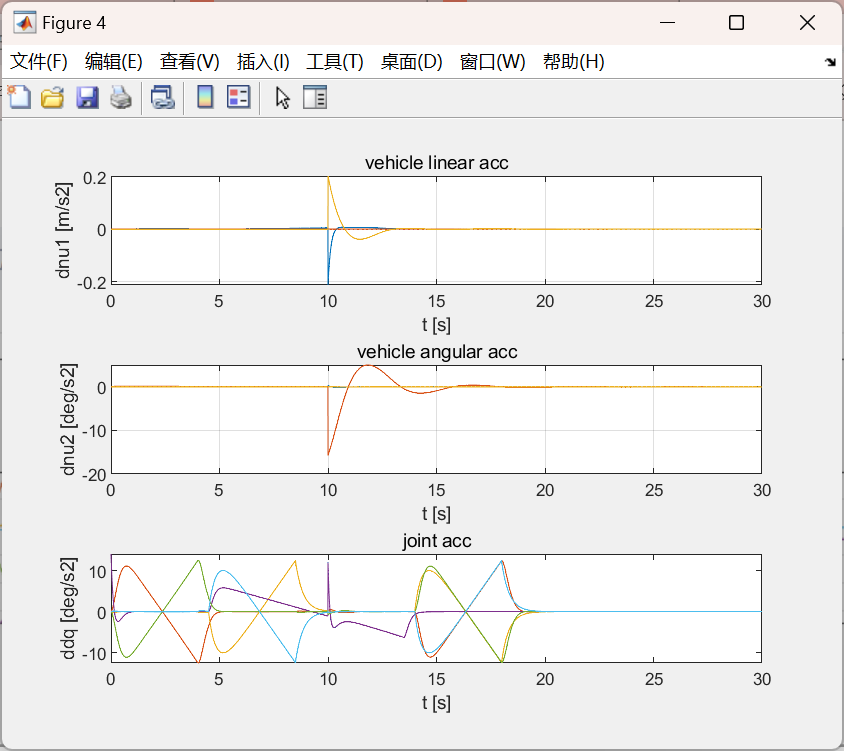
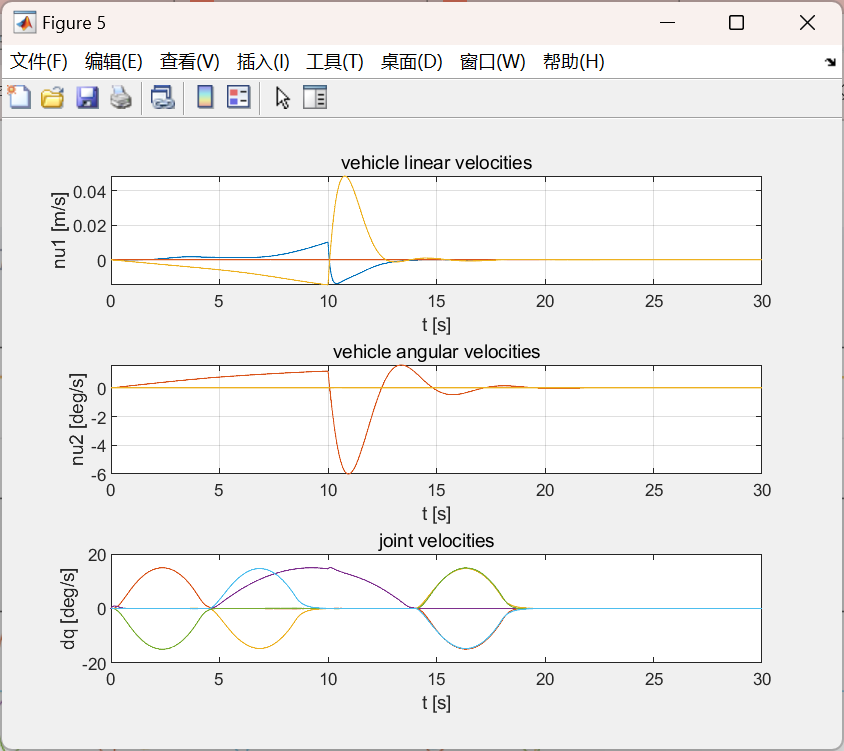
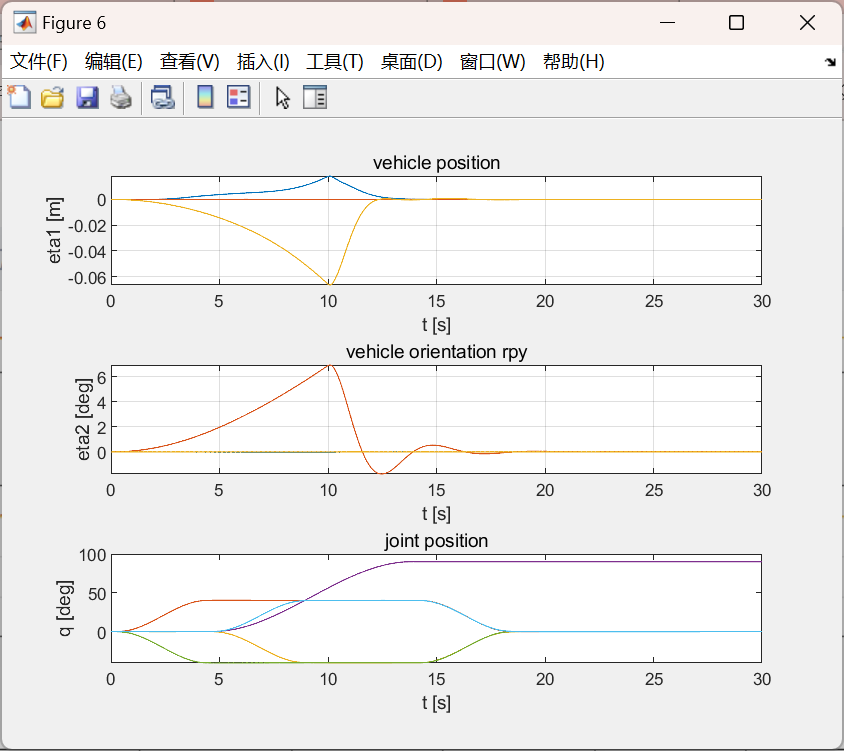
水下机器人-机械手系统(Underwater vehicle-manipulator systems, UVMS)可以完成除观测之外的水下采样、抓取、操作等任务,在海洋科学考察、海洋工程等领域得到广泛应用。通过对近年来国内外UVMS的研究现状进行综述,介绍了不同的UVMS本体结构与机械手构型,总结了UVMS的运动学、动力学和水动力学的建模方法,分析了人机交互式遥控操作控制方式,针对UVMS的自主控制中的运动规划、位置与轨迹跟踪、独立与协调控制、运动补偿控制、力/位置混合控制、视觉伺服控制等问题做了分类阐述。 该项目体现UVDMS(水下机器人双机械手系统)上的运动学、动力学和控制模拟器。采用DH法建立运动学模型,并使用牛顿-欧拉法建立动力学模型。该项目为UVDMS的水下抓取操作提供了一个演示。 📚2 运行结果
[1]常宗瑜,张扬,郑方圆,郑中强,王吉亮.水下机器人-机械手系统研究进展:结构、建模与控制[J].机械工程学报,2020,56(19):53-69. 👨💻4 Matlab代码主函数部分代码: clc fprintf('\n ----------------') fprintf('\n ----------------') fprintf('\n -- SIMURV 4.0 --') fprintf('\n ----------------') fprintf('\n ----------------') % take path and "now" to store data mypath = pwd; prefix = datestr(now,30); % --------------------------------------------------- % load the model and copy the m-file in the folder output % --------------------------------------------------- cd data if (exist('model_name','var')==0) model_name = uigetfile('data*.m', 'select a model to simulate'); end model_copy = strcat(mypath,filesep,'output',filesep,prefix,model_name); copyfile(model_name,model_copy); eval(strrep(model_name,'.m','')); fprintf('\nmodel copied in %s',[filesep,'output',filesep,prefix,model_name]); cd .. % --------------------------------------------------- % output name to be copied in the folder output % --------------------------------------------------- % output_name = strcat(mypath,filesep,'output',filesep,prefix,'out.mat'); % fprintf('\noutput will be copied in %s',[filesep,'output',filesep,prefix,'out.mat']); output_name = strcat('demo',prefix,'out.mat'); % 2020.2.6 fprintf('\noutput will be copied in %s',[filesep,'output',filesep,prefix,'out.mat']); % --------------------------------------------------- % run the "core" simulation file and copy the m-file in the folder output % --------------------------------------------------- cd func if (exist('core_simulator_name','var')==0) core_simulator_name = uigetfile('core*.m', 'select the core simulation file'); end core_simulator_copy = strcat(mypath,filesep,'output',filesep,prefix,core_simulator_name); copyfile(core_simulator_name,core_simulator_copy); fprintf('\ncore_simulator in %s',[filesep,'output',filesep,prefix,core_simulator_name]); eval(strrep(core_simulator_name,'.m','')); cd .. % --------------------------------------------------- % save simulation output in a mat file % --------------------------------------------------- cd output eval(['save ',output_name]); cd .. % --------------------------------------------------- % warning for too much files in the output dir % --------------------------------------------------- file_number = size(dir('output'),1)-2; if file_number>30 fprintf('\n %d files are currently stored in the output folder, consider erase some',file_number); fprintf('\n to erase all type: delete output/2*'); end % --------------------------------------------------- % exiting stuff % --------------------------------------------------- fprintf('\n\n to run another simulation with same model and controller type: simurv[enter]'); fprintf('\n to modify the model type: clear model_name, simurv[enter]'); fprintf('\n to modify the controller type: clear core_simulator_name, simurv[enter]'); fprintf('\n\n'); clear mypath prefix model_copy core_simulator_copy |

【本文地址】
今日新闻 |
推荐新闻 |