【工具篇】 Solidworks导出xml模型到matlab及simscape一系列输入输出参数设置 |
您所在的位置:网站首页 › solidworks导出动画有一半黑 › 【工具篇】 Solidworks导出xml模型到matlab及simscape一系列输入输出参数设置 |
【工具篇】 Solidworks导出xml模型到matlab及simscape一系列输入输出参数设置
|
目录标题
准备环节第一步:下载第二步:安装第三步:将MATLAB注册为自动化服务器第四步:完成在CAD软件端的配置【即sw等】
操作环节导出sw中装配体效果
检验环节额外操作:去除中文路径修改各个实体模型的颜色在xml中修改在matlab simscape中修改
matlab导入模型修改simscape重力方向修改模型质量关节可测量【输出量】的显示量纲数与无量纲数转换命名变量并显示
关节【驱动量】设置封装
问题记录:参考视频
这个插件跟
上一篇文章提到的sw2urdf插件是平行关系;
本插件的作用是
将solidworks的装配体导出成xml文件【并最终在matlab simscape中使用】
该插件的下载方法及使用方法在matlab官方均有提供 如果看不懂英文,也可以看SolidWorks模型导入到MATLAB(Simulink-Simscape)详细过程这篇文章,博主把英语文档翻译了一遍。 另附matlab端的操作指南和Solidworks端的操作指南。 写在前面: 本文与官网教程略有出入,只是记录了笔者设备调试成功的经验大部分的步骤是照着matlab端的操作指南走的,如果换到了Solidworks端操作指南我会提出这个插件与sw2urdf的一个不同之处在于,他会记住你的配合关系,这个插件中设置恰当的配合关系很重要!有待考究 本插件不需要选择轴和坐标系等,所有关系均根据配合关系自动生成 准备环节准备环节是只有第一次使用该插件时需要进行的操作 第一步:下载按照官网给出的链接,进入下载界面,邮箱等信息可以随便填,不重要,填完进入如下界面 进入下载目录,新建一个脚本,输入 install_addon('zipname')其中,"zipname"是zip文件的名字,如install_addon('smlink.r2020b.win64.zip)` 命令行显示类似下图【untitled.m是我创建的脚本,里面只有这一行命令】 每次导出 CAD 装配模型时,Simscape Multibody Link插件都会尝试连接到 MATLAB。要启用连接,您必须将 MATLAB 注册为自动化服务器。 但是从我的使用经验来看,只要导出过一次.dll文件,就能永久在Solidworks使用了 可以通过以下两种方式将MATLAB注册为自动化服务器 以管理员模式打开 MATLAB ,在下方命令行中输入"regmatlabserver"以管理员模式打开系统的命令提示符【cmd】,输入"matlab -regserver"可以考虑进行完这一步之后再进行一次第二步 至此,matlab端的操作告一段落,接下来的操作在Solidworks端; 若上述步骤完成的顺利,第二或者第三步命令行里会有类似"保存文件到XXX.dll中"之类的字样 第四步:完成在CAD软件端的配置【即sw等】这一步需要打开solidworks,跟sw2urdf时的操作一样,点开工具->插件,在 选择 工具-Simscape Multibody Link-Export-Simscape Multibody… 注意配合关系应合理且恰当,所有配合关系均会同步导出到xml文件中。 注意:本插件不需要选择轴和坐标系等,所有关系均根据配合关系自动生成 部分参数,如生成STEP或STL可在settings中修改,其他参数笔者并未关注,欢迎自行探索 效果如图所示,实体文件自动带了一个中文后缀,最好改成不带中文的【在.xml中也要改】
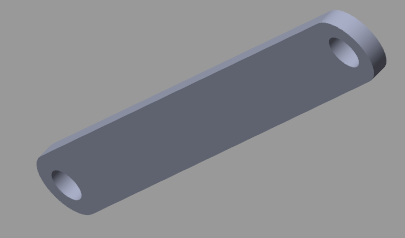
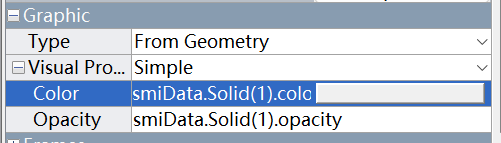
至此,全部工作已经完成🙌 额外操作:去除中文路径但是,为了让matlab识别到你的文件,首先需要将生成的实体文件中的中文去掉,并保证文件的绝对路径没有中文。 修改各个实体模型的颜色如果没有设置颜色,那么所有模型都将会是#CAD1EE的灰色,如 这种颜色将会完美融入背景,促进你近视度数的增加(⊙﹏⊙) 最好把颜色修改得炫彩夺目点儿,方便观察。 在xml中修改找到以下片段,把两处rgb都改成目标颜色,下面的Specular不必修改。 将两个实体模型分别改成不同颜色,建议选择饱和度高一点的颜色 在matlab simscape中修改跟下段的修改质量在同一个界面,双击实体,选择Graphic-Visual Properties-Color,单击色块,选择合适的颜色【当前是默认的灰色】 在matlab中新建一个脚本,输入导入模型的命令后,simulink界面会自动跳出 clear clc smimport("XXXXX.xml")加载界面 模型运行状态可能和我们想的不一致,这是因为系统的重力方向与我们预想的重力方向不同导致的 修改simscape重力方向双击 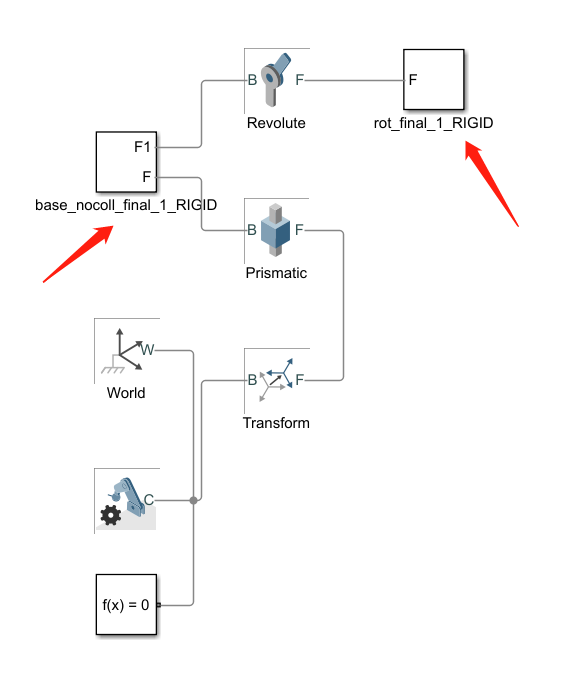 进入子页面显示如下 进入子页面显示如下  ;双击 ;双击 进入inertia页面,共有三个选项:点质量、常数、根据几何体计算; 选择calculate from Geometry;再选择 Based on:Costom Mass 进入inertia页面,共有三个选项:点质量、常数、根据几何体计算; 选择calculate from Geometry;再选择 Based on:Costom Mass 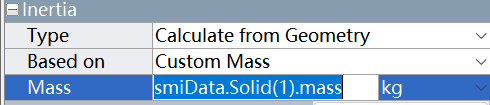 将选中区域改成预设的质量;这时质量就会根据集合体形状均匀分配
关节可测量【输出量】的显示
双击关节副 将选中区域改成预设的质量;这时质量就会根据集合体形状均匀分配
关节可测量【输出量】的显示
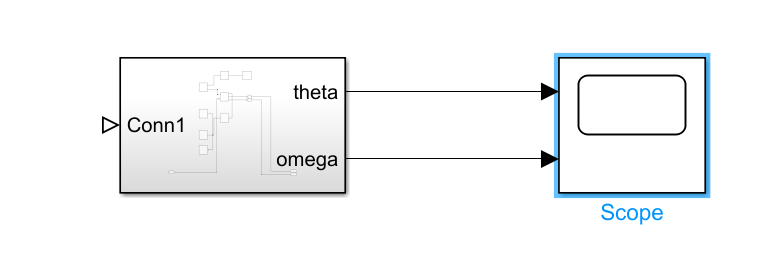
双击关节副 添加Scope窗口,我们发现输出口并不能直接接到Scope上,这是因为Scope观测的是数字量,而输出是物理量纲。
量纲数与无量纲数转换
进入Simulink的库浏览器,选择Simscape-Utilities;如图框中两个模块是最常用的。 添加Scope窗口,我们发现输出口并不能直接接到Scope上,这是因为Scope观测的是数字量,而输出是物理量纲。
量纲数与无量纲数转换
进入Simulink的库浏览器,选择Simscape-Utilities;如图框中两个模块是最常用的。
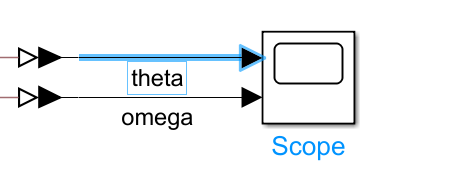 【注意,如果是上面的Prismatic移动副,此处Sensing对应的Position和Velocity应该是位置和速度,而不是角度与角速度】在Scope界面中,右键-配置属性(Configuration Properties)-画面(Display)-显示图例(Show legend) 【注意,如果是上面的Prismatic移动副,此处Sensing对应的Position和Velocity应该是位置和速度,而不是角度与角速度】在Scope界面中,右键-配置属性(Configuration Properties)-画面(Display)-显示图例(Show legend) 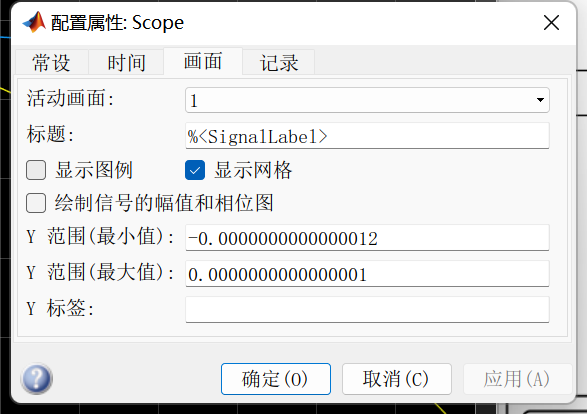 关节【驱动量】设置
同样地,双击关节副点击Z Prismatic Primitive - Actuation -Force,自行选择
关节【驱动量】设置
同样地,双击关节副点击Z Prismatic Primitive - Actuation -Force,自行选择 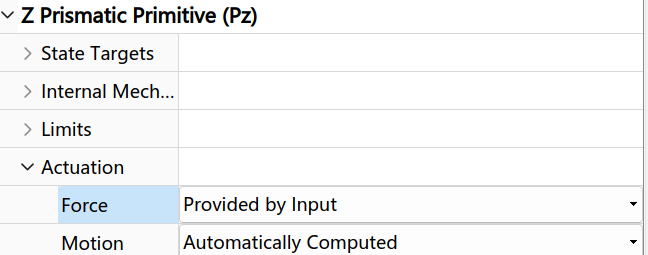 Force:力;Motion:力矩;二者同时给输入一般会报错 【通常移动副驱动是力;转动副驱动是转矩】
封装
将输入输出模块下拉,如图所示,注意不要拉到输入输出 Force:力;Motion:力矩;二者同时给输入一般会报错 【通常移动副驱动是力;转动副驱动是转矩】
封装
将输入输出模块下拉,如图所示,注意不要拉到输入输出 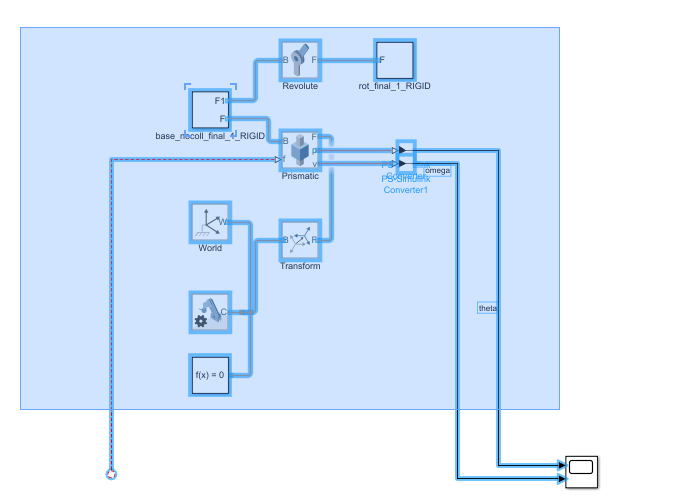 鼠标挪至右侧出现的三个点处选择 创建子系统 鼠标挪至右侧出现的三个点处选择 创建子系统  完成效果图 完成效果图
似乎第一次运行simscape没有问题,但是同样的文件运行第二次时,就会显示XXX文件/文件夹不存在,原因未知😔,解决方法:及时保存?? 参考视频后面的simscape模块参考:matlab动力学建模与simscape验证 倒立摆系列后面的一些视频应该也会参考这个up主的讲解,强烈推荐大家观看! |
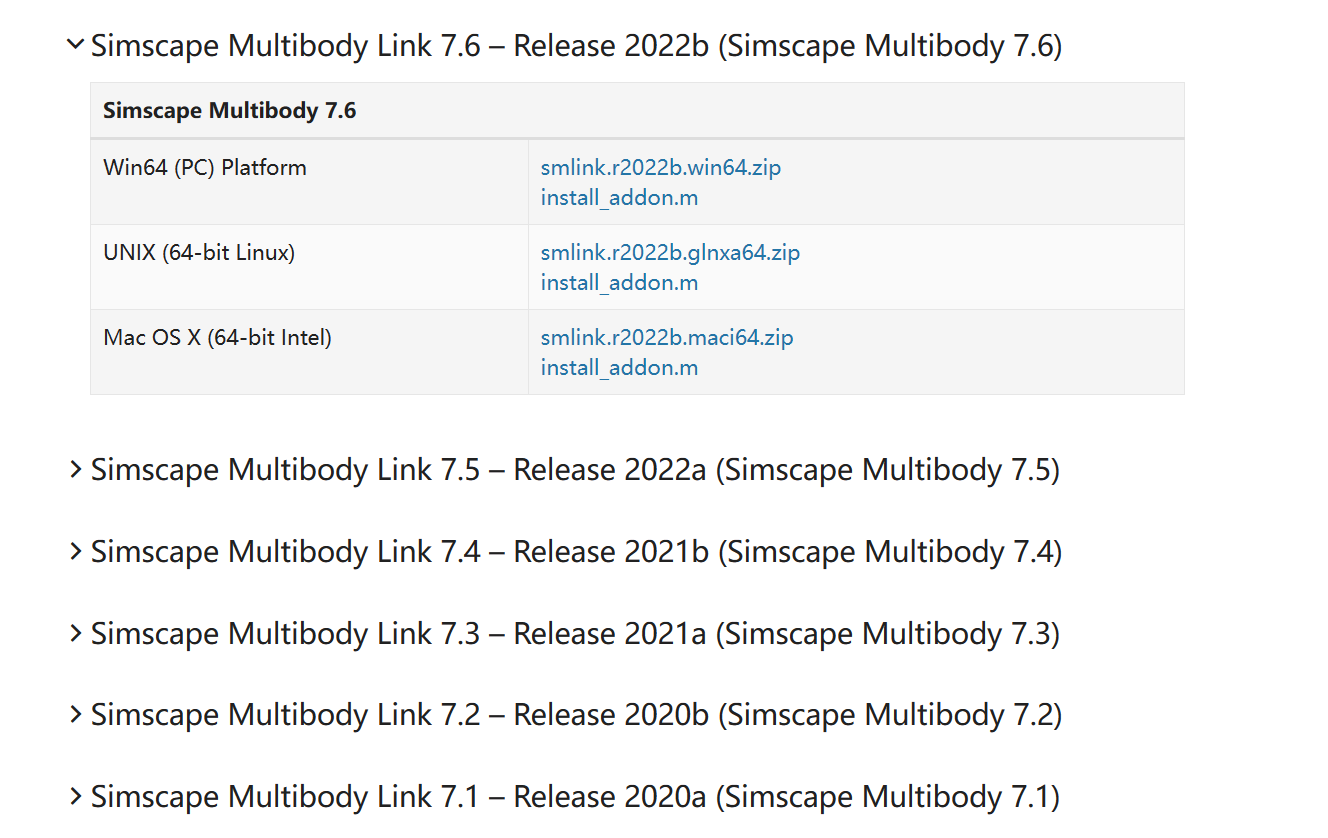 下载与matlab版本对应的.zip和.m文件,不需要解压.zip
下载与matlab版本对应的.zip和.m文件,不需要解压.zip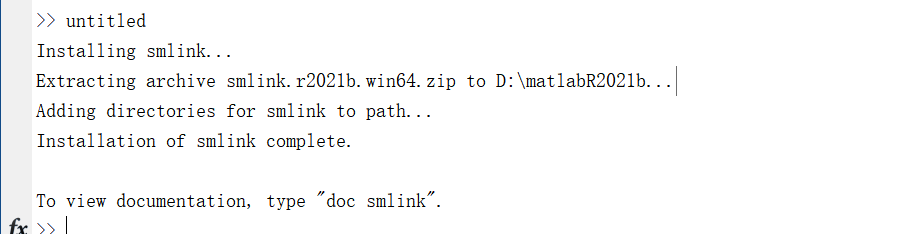
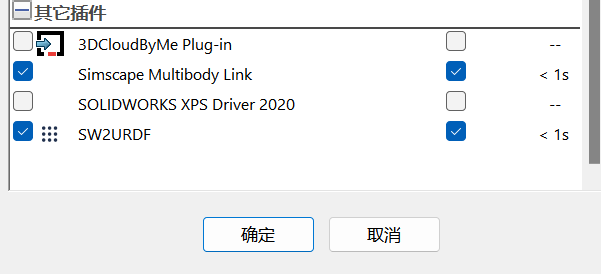 在其他插件中选择Simscape Multibody Link
在其他插件中选择Simscape Multibody Link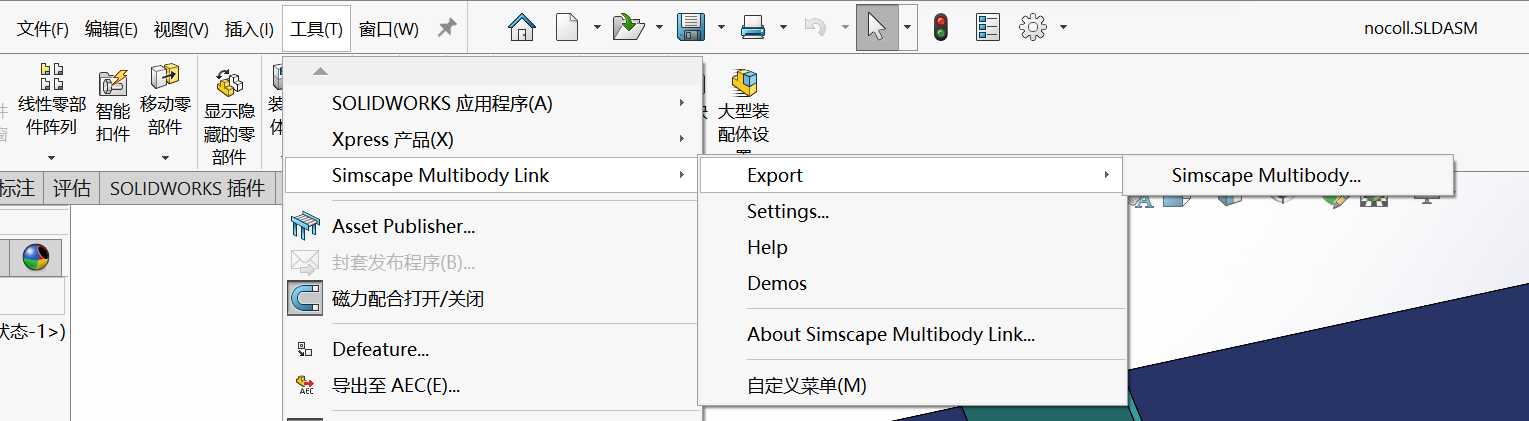

 simulink界面
simulink界面 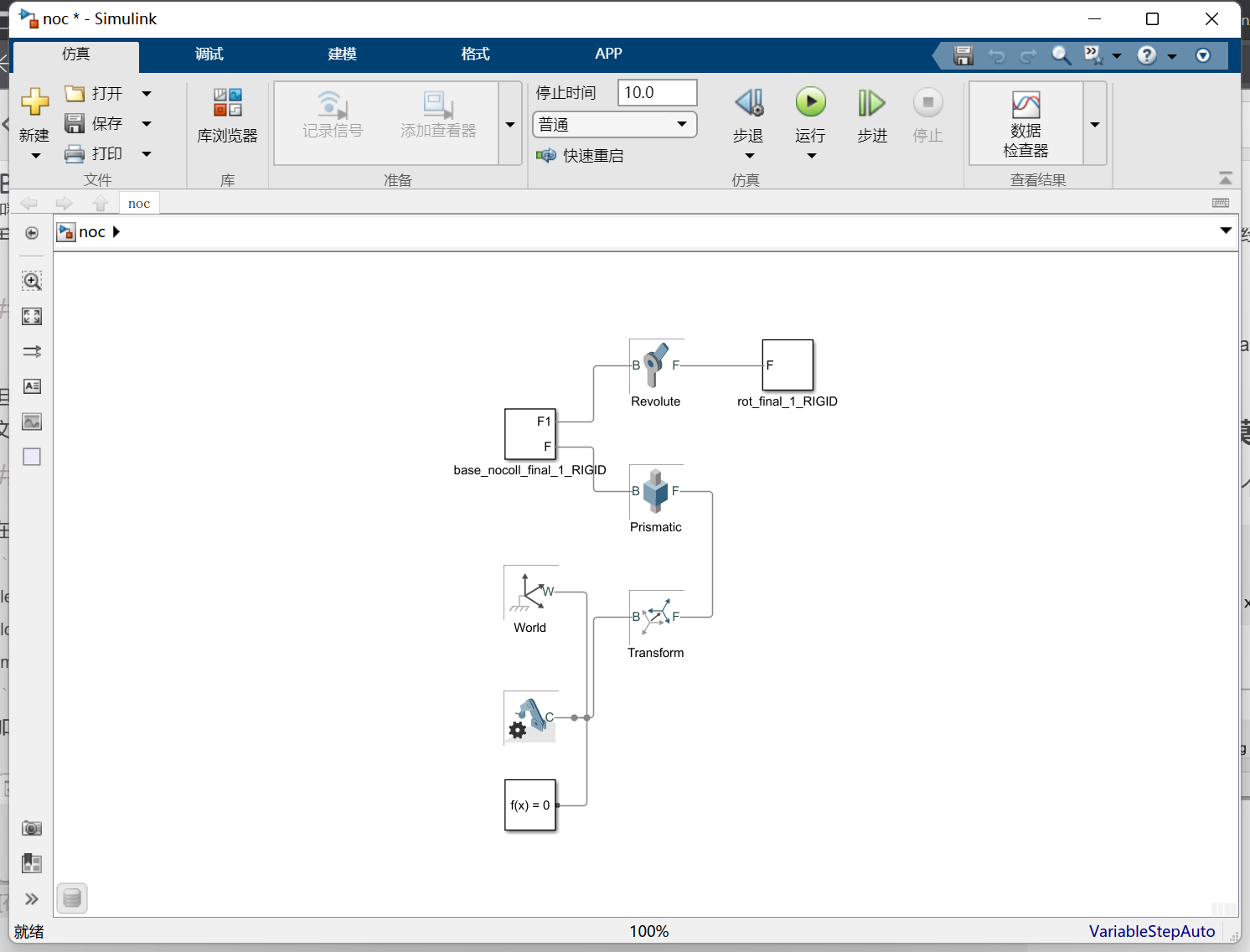 调整停止时间后,点击右上角运行:可能会发现模型固定不动
调整停止时间后,点击右上角运行:可能会发现模型固定不动 ,
, 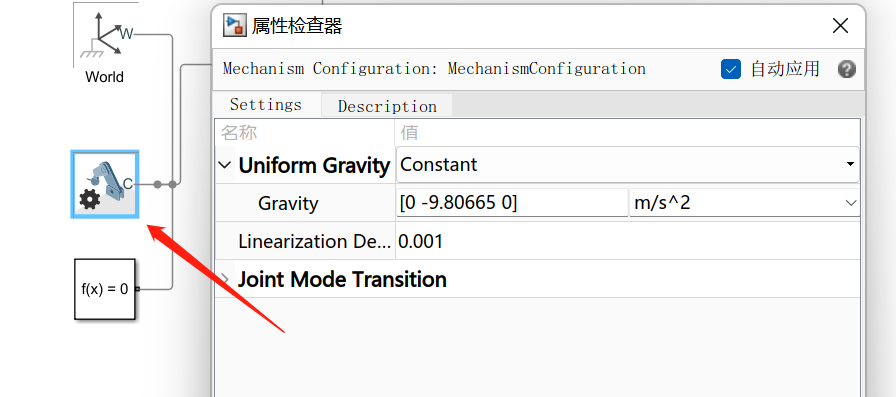 我们发现重力是沿y方向的,结合上面的仿真动画,进行修改即可~ 成果:
我们发现重力是沿y方向的,结合上面的仿真动画,进行修改即可~ 成果: 
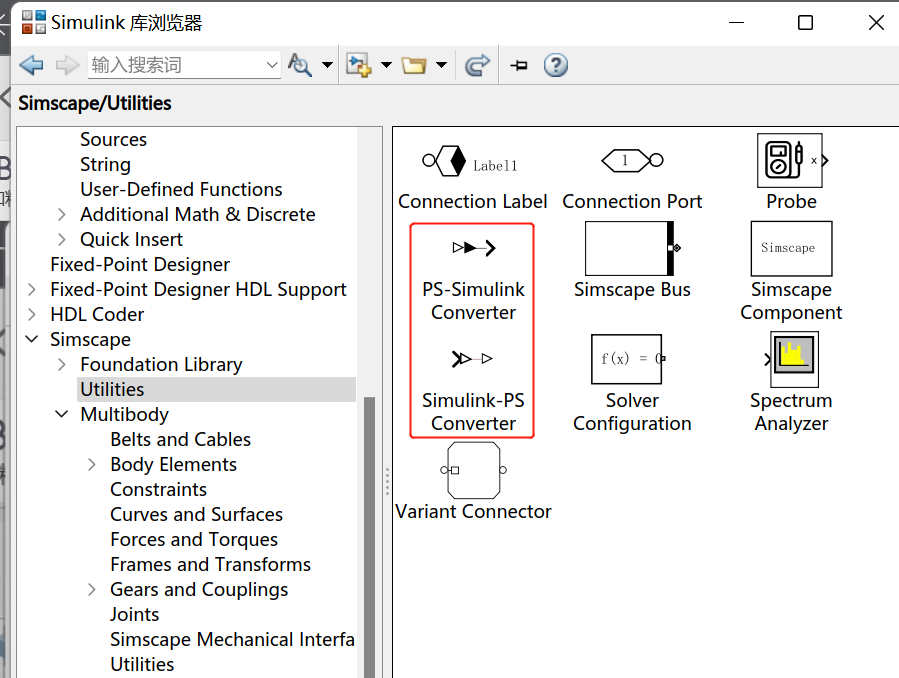 量纲数转非量纲数的方法如图所示【用白箭头转黑箭头那个,白接白、黑接黑】
量纲数转非量纲数的方法如图所示【用白箭头转黑箭头那个,白接白、黑接黑】 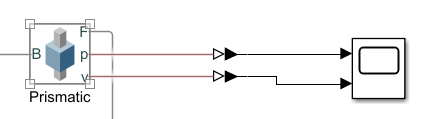
 展开子系统
展开子系统 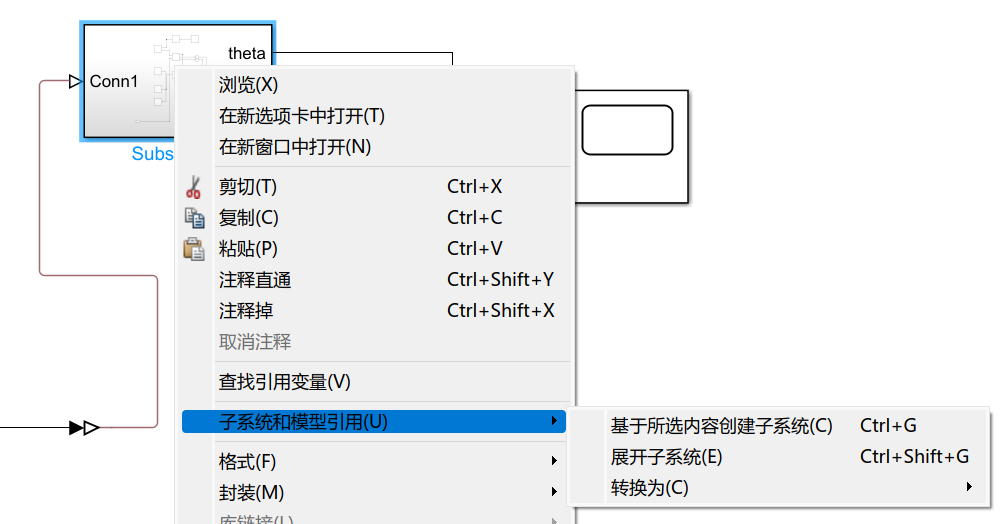
【本文地址】
今日新闻 |
推荐新闻 |