控制系统稳态误差(静态误差)分析 |
您所在的位置:网站首页 › simulink阶跃响应曲线图转换成figure图 › 控制系统稳态误差(静态误差)分析 |
控制系统稳态误差(静态误差)分析
|
本文包含以下内容: 一、控制系统稳态误差概述 二、计算稳态误差的一般方法(静态误差系数法) 三、simulink验证 一、控制系统稳态误差概述 如下图,E(s)为以输入为定义的误差。 影响ess的因数:系统自生的结构参数(传递函数),外部作用的类型(阶跃、斜坡、加速度),外部作用的位置(误差、输入)。 二、计算稳态误差的一般方法(静态误差系数法) 1、判定系统稳定性,系统稳定是系统正常工作的的前提条件: 2、求误差的传递函数 3、静态误差系数法(K为开环增益,型别为纯积分环节个数) 结果如下: num/den = 100 s + 500 -------------------------- s^3 + 10 s^2 + 100 s + 500有了以上传递函数,我们可以用roots()求特征方程的跟来判定系统的稳定性: >> roots(den) ans = -1.7610 + 8.6072i -1.7610 - 8.6072i -6.4780 + 0.0000i由于根的实部都小于0,因此可以判定系统稳定。 接着,由结构图可以快速的得出: 开环传递函数为: G ( s ) = 10 ∗ ( s + 5 ) s 2 ∗ ( 0.1 s + 1 ) G(s) = {10*(s+5) \over{s^2*(0.1s + 1)}} G(s)=s2∗(0.1s+1)10∗(s+5) 可知系统的开环增益K=10 K=2,积分环节为v=2,为二型系统,对照静态系数表可得,如果输入信号为斜坡信号稳态误差为0. 三、simulink验证 在simulink中绘制如下框图: |
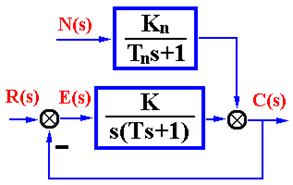 稳态误差指的就是:
稳态误差指的就是:  用终值定理可得:
用终值定理可得: 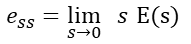
 举例说明: 假设有如下系统:
举例说明: 假设有如下系统:  首先我们要求出系统的传递函数,在simulink中画出上述结构图,保存为esstest.slx文件。在matlab中输入以下代码,可将结构图转换为传递函数:
首先我们要求出系统的传递函数,在simulink中画出上述结构图,保存为esstest.slx文件。在matlab中输入以下代码,可将结构图转换为传递函数: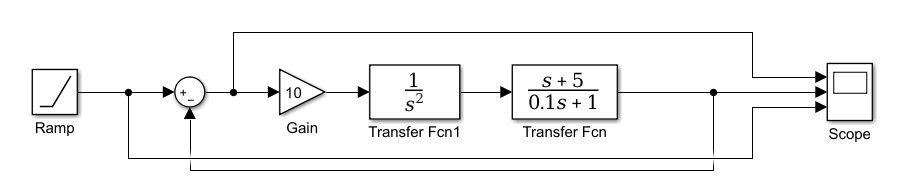

【本文地址】