数字控制系统Simulink仿真建模(5) (采样噪声的仿真) |
您所在的位置:网站首页 › simulink数字显示器 › 数字控制系统Simulink仿真建模(5) (采样噪声的仿真) |
数字控制系统Simulink仿真建模(5) (采样噪声的仿真)
|
在实际控制器中,受采样电路性能的影响,硬件电路采集到的值会存在采样噪声,采样噪声引入的误差值也提高了控制系统鲁棒性的要求。而这个误差在仿真中通常是被忽略的,这也是控制算法在仿真中和实际实验时控制效果不一致的原因之一。 今天来聊一下Simulink仿真中如何对采样噪声进行还原,模拟实际的采样噪声。 在Simulink仿真中,我们选择使用Random Number模块进行采样噪声仿真,将该模块与仿真电路输出的信号相加,得到的即为实际采样电路采集到的值。
图1 噪声模块
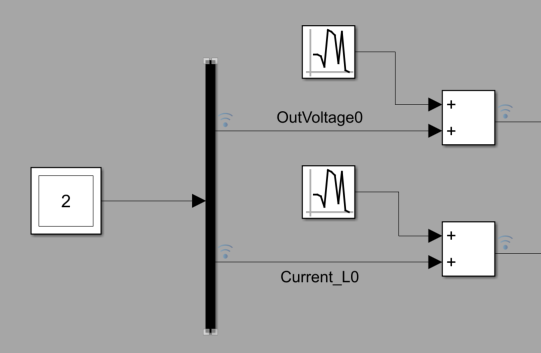
图2 实际采样信号还原
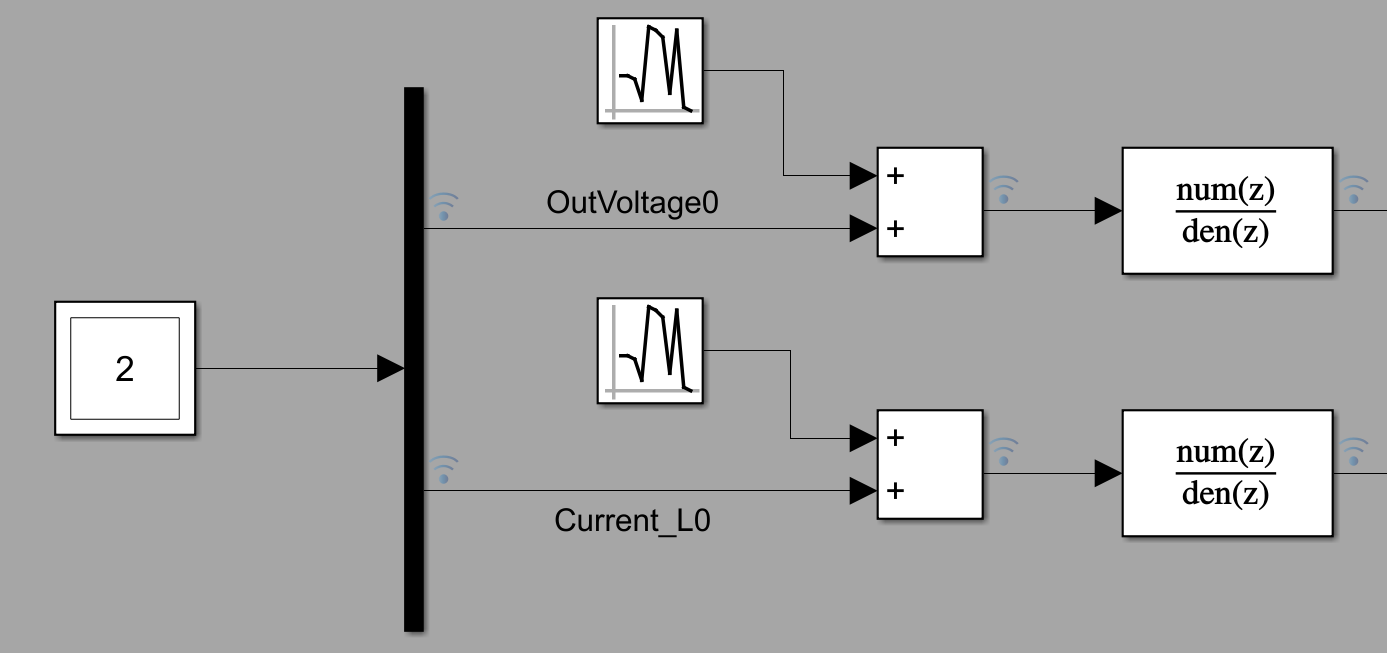
图3 噪声模块参数设计 噪声模块参数设计如图3所示,其中平均值(Mean)取0后与仿真电路输出信号相加实现的效果即为噪声在实际信号上下波动,方差值觉得上下波动的幅值,方差值越大,噪声则越大。 针对采样噪声的问题,在硬件电路上通常选择在采样输出后级加一个RC滤波电路,其带宽依具体情况而定,带宽设计的太大起不到滤波效果,带宽太小又会导致采样信号幅值衰减,相位产生较大延迟。本模型选择添加一个带宽为1e+7rad/s的一阶低通滤波器。 具体实现如下:
图4 一阶低通滤波器的仿真实现
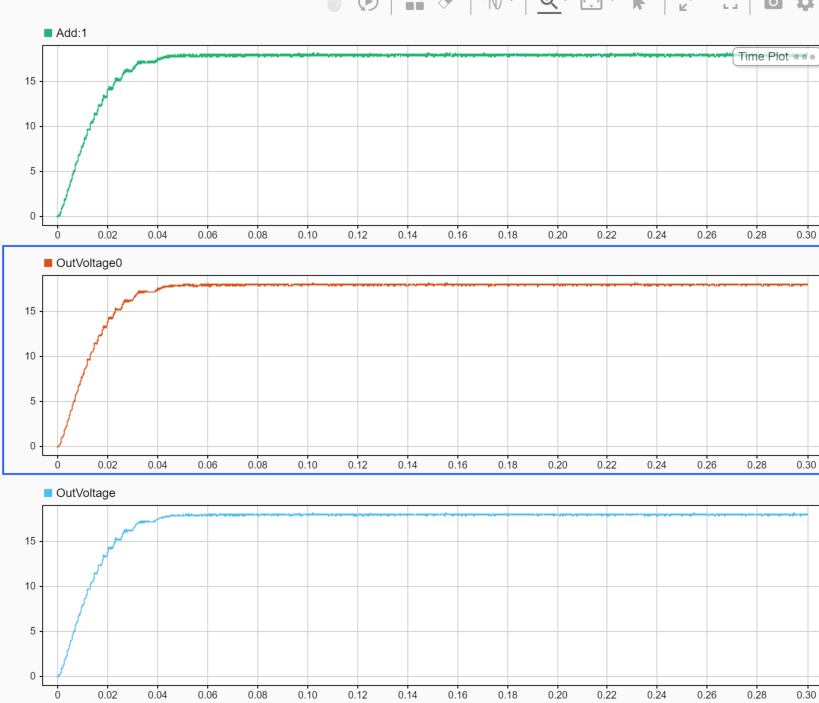
图5 仿真结果 图5仿真结果由上到下分别为添加噪声后的输出电压信号,未添加噪声的输出电压信号和经RC滤波电路后的MCU采样信号 。 |



【本文地址】
今日新闻 |
推荐新闻 |