串口通信技术及其编码实现 |
您所在的位置:网站首页 › simulink接线为什么红 › 串口通信技术及其编码实现 |
串口通信技术及其编码实现
|
版权声明
本文原创作者:谷哥的小弟作者博客地址:http://blog.csdn.net/lfdfhl
串口通信技术概要
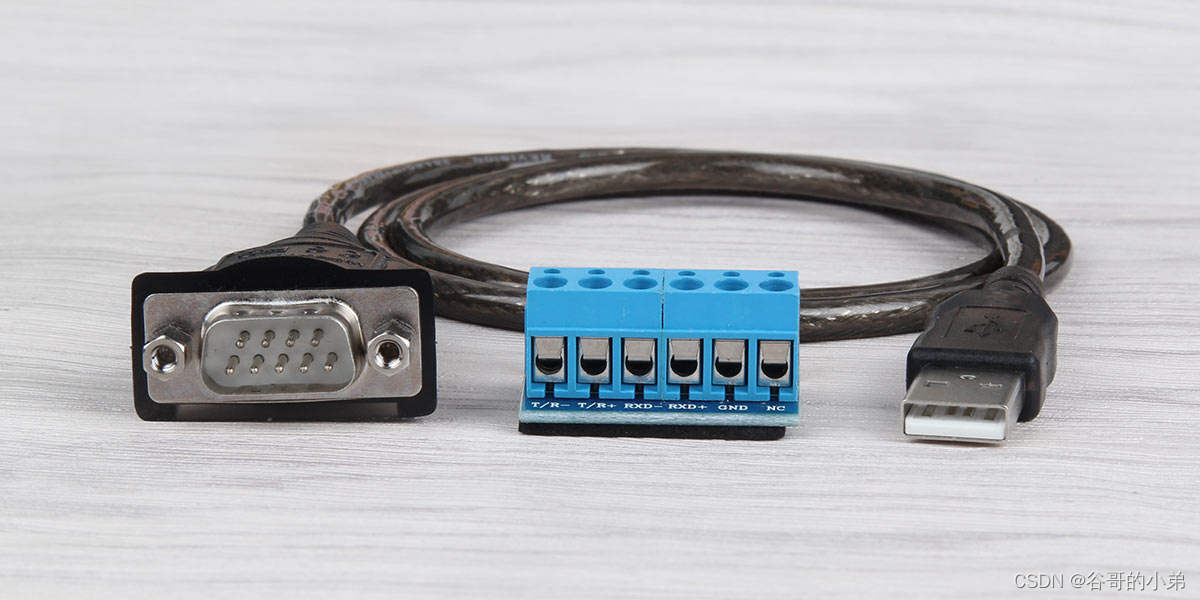
串口通信是指通过串行接口(或称为RS-232接口)实现的计算机通信方式。串口通信一般使用传统的异步方式,即发送方和接收方使用不同的时钟信号,通过发送方发送的起始位、数据位、停止位以及可能的校验位来确定每个数据字节的开始和结束。 串口通信常用于连接计算机和外设,如调制解调器、打印机、扫描仪、多功能一体机等。它可以在相对较长的距离内传输数据,而且设备之间的连接比较简单,只需一条串行线就可以完成。但是,由于串口通信存在传输速率慢、传输数据量小等缺点,它已经被USB等更先进的接口所替代,但在一些应用场景下仍然有着广泛的应用。 串口通信(Java编码)Java 实现串口通信,可以使用 JavaComm API(Java Communications API),该 API 是专门用于串口通信的 Java 库。下面是一个简单的串口通信示例代码: import gnu.io.*; import java.io.*; import java.util.*; public class SerialTest implements SerialPortEventListener { private SerialPort serialPort; public void initialize() { CommPortIdentifier portId = null; Enumeration portEnum = CommPortIdentifier.getPortIdentifiers(); while (portEnum.hasMoreElements()) { CommPortIdentifier currPortId = (CommPortIdentifier) portEnum.nextElement(); if (currPortId.getName().equals("/dev/tty.XXX")) { portId = currPortId; break; } } if (portId == null) { System.out.println("Could not find COM port."); return; } try { serialPort = (SerialPort) portId.open(this.getClass().getName(), 2000); serialPort.setSerialPortParams(9600, SerialPort.DATABITS_8, SerialPort.STOPBITS_1, SerialPort.PARITY_NONE); InputStream input = serialPort.getInputStream(); OutputStream output = serialPort.getOutputStream(); serialPort.addEventListener(this); serialPort.notifyOnDataAvailable(true); } catch (Exception ex) { System.out.println("Failed to open serial port: " + ex.getMessage()); } } public synchronized void close() { if (serialPort != null) { serialPort.removeEventListener(); serialPort.close(); } } public synchronized void serialEvent(SerialPortEvent oEvent) { if (oEvent.getEventType() == SerialPortEvent.DATA_AVAILABLE) { try { int available = serialPort.getInputStream().available(); byte chunk[] = new byte[available]; serialPort.getInputStream().read(chunk, 0, available); String message = new String(chunk); System.out.print(message); } catch (Exception ex) { System.out.println("Error reading data from serial port: " + ex.getMessage()); } } } public static void main(String[] args) { SerialTest main = new SerialTest(); main.initialize(); } }在上面的代码中,我们通过遍历系统中所有可用的端口来查找指定的串口并打开它,然后设置串口的波特率、数据位、停止位和校验位等参数,并获取输入输出流。在 serialEvent 方法中,我们监听串口数据,并将数据转成字符串输出到控制台。 需要注意的是,上述代码需要借助RXTXcomm.jar的支持才能使用,这个jar包需要与JDK安装目录\jre\lib\ext下的comm.jar联合使用。 串口通信(C语言编码) #include #include #include #include #include #include int serial_fd; /** * 打开串口,设置波特率、数据位、停止位和校验位等参数 */ int open_serial_port(const char* dev_name, int baud_rate) { serial_fd = open(dev_name, O_RDWR | O_NOCTTY); if (serial_fd == -1) { perror("open_serial_port"); return -1; } struct termios old_termios, new_termios; if (tcgetattr(serial_fd, &old_termios) == -1) { perror("tcgetattr"); return -1; } memset(&new_termios, 0, sizeof(new_termios)); new_termios.c_cflag = CLOCAL | CREAD; new_termios.c_cflag &= ~CSIZE; new_termios.c_cflag |= CS8; new_termios.c_cflag &= ~PARENB; new_termios.c_cflag &= ~CSTOPB; new_termios.c_cc[VTIME] = 0; new_termios.c_cc[VMIN] = 1; cfsetispeed(&new_termios, baud_rate); cfsetospeed(&new_termios, baud_rate); tcflush(serial_fd, TCIFLUSH); if (tcsetattr(serial_fd, TCSANOW, &new_termios) == -1) { perror("tcsetattr"); return -1; } return 0; } /** * 关闭串口 */ void close_serial_port() { if (serial_fd > 0) { close(serial_fd); } } /** * 给串口发送数据 */ int write_serial_data(const void* data, size_t size) { if (serial_fd == -1) { printf("Serial port not opened\n"); return -1; } int n = write(serial_fd, data, size); if (n if (serial_fd == -1) { printf("Serial port not opened\n"); return -1; } int n = read(serial_fd, buf, size); if (n // 打开串口 if (open_serial_port("/dev/ttyS0", B9600) == -1) { return -1; } // 发送数据 char data[] = {'H', 'e', 'l', 'l', 'o', '\n'}; if (write_serial_data(data, sizeof(data)) == -1) { close_serial_port(); return -1; } // 接收数据 char buf[256]; int n = read_serial_data(buf, sizeof(buf)); if (n > 0) { printf("%s\n", buf); } else if (n == 0) { printf("No data available\n"); } // 关闭串口 close_serial_port(); return 0; }在上面的代码中,我们使用Linux标准头文件 fcntl.h 和 termios.h 来操作串口,其中 open_serial_port 函数打开指定的串口并设置波特率、数据位、停止位和校验位等参数; write_serial_data 函数往串口发送数据; read_serial_data 函数从串口读取数据; close_serial_port 函数关闭串口。需要注意的是,不同的操作系统和平台对于串口的操作可能存在差异,在具体实现时需要根据自己的环境进行相应调整。 |
【本文地址】
今日新闻 |
推荐新闻 |