ROS机器人应用(5) |
您所在的位置:网站首页 › ros发布topic命令行 › ROS机器人应用(5) |
ROS机器人应用(5)
ROS机器人应用(5)—— 键盘和发布话题控制小车移动
 zyw2002
分类:ROS
发布时间 2023.07.21阅读数 1540 评论数 0
文章目录
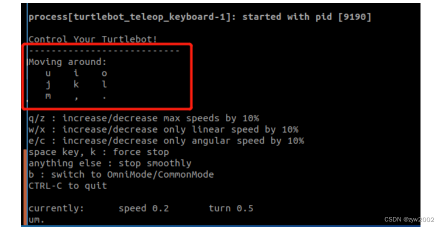
1. 键盘控制小车移动
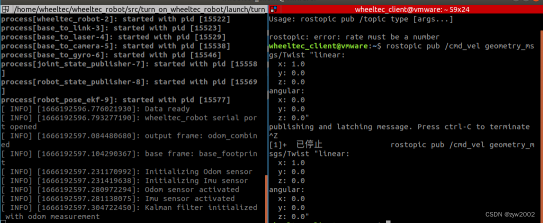
2. 发布话题控制小车的移动
1. 键盘控制小车移动
分别打开两个终端,都ssh连接上小车的服务端
ssh -Y [email protected]
一个终端打开小车的控制节点,另一个终端打开键盘的控制节点
# 打开小车的运动控制节点
roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch
# 打开键盘控制的节点
roslaunch wheeltec_robot_rc keyboard_teleop.launch
zyw2002
分类:ROS
发布时间 2023.07.21阅读数 1540 评论数 0
文章目录
1. 键盘控制小车移动
2. 发布话题控制小车的移动
1. 键盘控制小车移动
分别打开两个终端,都ssh连接上小车的服务端
ssh -Y [email protected]
一个终端打开小车的控制节点,另一个终端打开键盘的控制节点
# 打开小车的运动控制节点
roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch
# 打开键盘控制的节点
roslaunch wheeltec_robot_rc keyboard_teleop.launch
1.小车开机,连接WIFI,密码:dongguan。 2.SSH远程登录:ssh [email protected],密码:dongguan 3.启动初始化节点(服务端):roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch 4.发布节点(命令行)控制小车移动(客户端):rostopic pub -r 2 /cmd_vel geometry_msgs/Twist其中-r 表示循环发布,2表示循环次数。
打赏 0 点赞 0 收藏 0 分享 微信 微博 QQ 图片 上一篇:ROS机器人应用(3)——程序修改编译与SublimeText 简析 下一篇:ROS机器人应用(4)—— 查看里程计、IMU 话题信息 |

【本文地址】
今日新闻 |
推荐新闻 |