23 |
您所在的位置:网站首页 › rmt什么单位 › 23 |
23
|
ESP32 IDF库中的RMT驱动
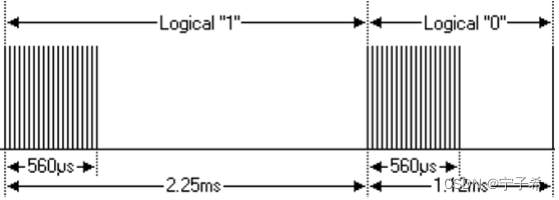
RMT(Remote Control Module)驱动是ESP-IDF库中的一个重要组成部分,它主要用于处理远程控制编码和解码。 红外遥控器介绍 一、红外遥控技术介绍红外遥控是一种无线、非接触控制技术,具有抗干扰能力强,信息传输可靠,功耗低,成本低,易实现等显著优点。它被诸多电子设备特别是家用电器广泛采用,并越来越多的应用到计算机和手机系统中。 红外遥控系统由发射和接收两大部分组成,应用编码/解码专用集成电路芯片来进行控制操作。发射部分包括键盘矩阵、编码调制、LED红外发送器;接收部分包括光、电转换放大器、解调、解码电路。 二、红外器件特性红外遥控器主要由红外发射器和红外接收器两部分组成。 红外发射器:红外发射器通常是一个红外LED,它可以发射红外光。当电流通过LED时,它会发射出红外光。红外LED的发射波长通常在940nm左右,这是人眼无法看到的红外光。 红外接收器:红外接收器是一个光电二极管,它可以将接收到的红外光转换为电信号。红外接收器通常有一个滤波器,可以过滤掉大部分的环境光,只接收特定频率的红外光。 红外发射管也是属于二极管类,红外发射电路通常使用三极管控制红外发射器的导通或者截至,在导通的时候,红外发射管会发射出红外光,反之,就不会发射出红外光。虽然我们用肉眼看不到红外光,但是我们借助手机摄像头就能看到红外光。但是红外接收管的特性是当接收到红外载波信号时,OUT 引脚输出低电平;假如没有接收到红外载波信号时,OUT 引脚输出高电平。 红外载波信号其实就是由一个个红外载波周期组成。在频率为 ( 38 K H z ) (38KHz ) (38KHz)下,红外载波周期约等于 26.3 u s ( 1 s / 38 K H z ≈ 26.3 u s ) 26.3us(1s / 38KHz ≈ 26.3us) 26.3us(1s/38KHz≈26.3us)。在一个红外载波发射周期里,发射红外光时间 8.77 u s 8.77us 8.77us 和不发射红外光 17.53 u s 17.53us 17.53us,发射红外光的占空比一般为 1 / 3 1/3 1/3。相对的,整个周期内不发射红外光,就是载波不发射周期。在红外遥控器内已经把载波和不载波信号处理好,我们需要做的就是识别遥控器按键发射出的信号,信号也是遵循某种协议的。 这里推荐一个视频可以快速了解红外控制器件: 📻一帧红外遥控信号,竟如此复杂,超乎你的想象!红外遥控的工作原理! 三、红外编解码协议介绍红外遥控器通常使用特定的编解码协议来发送和接收数据。目前广泛使用的是:PWM(脉冲宽度调制)的NEC 协议和Philips PPM(脉冲位置调制)的 RC-5 协议的。这里以NEC为主讲解ESP32 红外遥控 (RMT) NEC 协议,其特征如下: 8 位地址和 8 位指令长度地址和命令 2 次传输(确保可靠性)PWM 脉冲位置调制,以发射红外载波的占比代表“0”和“1”载波频率为 38Khz位时间为 1.125ms 或 2.25ms在 NEC 协议中,如何为协议中的数据‘0’或者‘1’这里分开红外接收器和红外发射器 红外发射器: 发送协议数据‘0’ = 发射载波信号560us + 不发射载波信号 560us发送协议数据‘1’ = 发射载波信号 560us + 不发射载波信号 1680us红外发射器的位定义如下图所示。 红外接收器: 接收到协议数据‘0’ = 560us 低电平 + 560us 高电平接收到协议数据‘1’ = 560us 低电平 + 1680us 高电平红外接收器的位定义如下图所示 如果你长时间按住遥控按钮,使用NEC协议的红外遥控器将会发射一个以110ms为周期的重复码。每一次用户按下遥控器按钮,遥控器在发送一次指令码后,就不会再发送指令码了,而是发送一段重复码。 RMT驱动 简介ESP32-S3的RMT 是一个红外发送和接收控制器,可通过软件加解密多种红外协议。RMT 模块可以实现模块内置 RAM 中的脉冲编码转换为信号输出,或将模块的输入信号转换为脉冲编码存入 RAM 中。此外,RMT 模块可以选择是否对输出信号进行载波调制,也可以选择是否对输入信号进行滤波和去噪处理。 RMT 共有八个通道,编码为 0 ~ 7,各通道可独立用于发送或接收信号: 0 ~ 3 通道专门用于发送信号;4 ~ 7 通道专门用于接收信号。每个发送通道和接收通道分别有一组功能相同的寄存器。另外,发送通道 3 和接收通道 7 对应的 RAM 支持 DMA访问,因此还有 DMA 相关的控制和状态寄存器。 RMT 符号的内存布局RMT 硬件定义了自己的数据模式,称为 RMT 符号。对于一个 RMT 符号的位字段:每个符号由两对两个值组成,每对中的第一个值是一个 15 位的值,表示信号持续时间,以 RMT 滴答计。每对中的第二个值是一个 1 位的值,表示信号的逻辑电平,即高电平或低电平。
该函数用于安装 RMT 接收通道,其函数原型如下所示: esp_err_t rmt_new_rx_channel(const rmt_rx_channel_config_t *config, rmt_channel_handle_t *ret_chan);该函数的形参描述,如下表所示: 形参描述config指向配置 RMT 接收通道的指针ret_chan返回的通用 RMT 通道句柄该函数的使用示例,如下所示: #include "driver/gpio.h" void example_fun(void) { // 初始化 RMT 接收通道句柄为 NULL rmt_channel_handle_t rx_chan = NULL; // 配置 RMT 接收通道参数 rmt_rx_channel_config_t rx_chan_config = { .clk_src = RMT_CLK_SRC_DEFAULT, // 使用默认时钟源 .gpio_num = 0, // 使用 GPIO0 .mem_block_symbols = 64, // 内存块大小为 64 .resolution_hz = 1 * 1000 * 1000, // 分辨率为 1MHz .trans_queue_depth = 4, // 传输队列深度为 4 .flags.invert_out = false, // 不反转输出信号 .flags.with_dma = false, // 不使用 DMA }; // 安装 RMT 接收通道,并检查错误 ESP_ERROR_CHECK(rmt_new_rx_channel(&rx_chan_config, &rx_chan)); } 2️⃣配置 RMT 接收通道的回调函数该函数用于配置 RMT 接收通道的回调函数,其函数原型如下所示: esp_err_t rmt_rx_register_event_callbacks(rmt_channel_handle_t rx_channel, const rmt_rx_event_callbacks_t *cbs, void *user_data);该函数的形参描述,如下表所示: 形参描述rx_channel创建的 RMT 通道句柄cbsRMT 接收事件回调函数结构体指针user_data用户数据,将直接传递给回调函数该函数的使用示例,如下所示: #include "driver/gpio.h" void example_fun(void) { QueueHandle_t receive_queue; rmt_channel_handle_t rx_chan = NULL; rmt_rx_channel_config_t rx_chan_config = { .clk_src = RMT_CLK_SRC_DEFAULT, // 使用默认时钟源 .gpio_num = 0, // 使用 GPIO0 .mem_block_symbols = 64, // 内存块大小为 64 .resolution_hz = 1 * 1000 * 1000, // 分辨率为 1MHz .trans_queue_depth = 4, // 传输队列深度为 4 .flags.invert_out = false, // 不反转输出信号 .flags.with_dma = false, // 不使用 DMA }; ESP_ERROR_CHECK(rmt_new_rx_channel(&rx_chan_config, &rx_chan)); // 创建用于存储接收完成事件数据的队列 receive_queue = xQueueCreate(1, sizeof(rmt_rx_done_event_data_t)); assert(receive_queue); //检查队列是否创建成功 rmt_rx_event_callbacks_t cbs = { .on_recv_done = RMT_Rx_Done_Callback, // 设置接收完成回调函数 }; ESP_ERROR_CHECK(rmt_rx_register_event_callbacks(rx_chan, &cbs, receive_queue)); } 3️⃣创建一个基于 NEC 协议的 RMT 编码器该函数用于创建一个基于 NEC 协议的 RMT 编码器,其函数原型如下所示: esp_err_t rmt_new_ir_nec_encoder(const ir_nec_encoder_config_t *config, rmt_encoder_handle_t *ret_encoder);该函数的形参描述,如下表所示: 形参描述config指向 RMT 编码器配置的指针ret_encoder返回的 RMT 编码器句柄该函数的使用示例,如下所示: #include "driver/gpio.h" void example_fun(void) { // 配置 NEC 编码器参数 ir_nec_encoder_config_t nec_encoder_cfg = { .resolution = 1000000, // 分辨率为 1MHz }; // 初始化 NEC 编码器句柄 rmt_encoder_handle_t nec_encoder = NULL; // 创建基于 NEC 协议的 RMT 编码器,并检查错误 ESP_ERROR_CHECK(rmt_new_ir_nec_encoder(&nec_encoder_cfg, &nec_encoder)); } 4️⃣使能 RMT 接收通道该函数用于使能 RMT 接收通道,其函数原型如下所示: esp_err_t rmt_enable(rmt_channel_handle_t channel);该函数的形参描述,如下表所示: 形参描述channel创建的 RMT 通道句柄该函数的使用示例,如下所示: #include "driver/gpio.h" void example_fun(void) { // 初始化 RMT 接收通道句柄为 NULL rmt_channel_handle_t rx_channel = NULL; //省略中间过程..... // 使能 RMT 接收通道,并检查错误 rmt_enable(rx_channel); } 5️⃣启动 RMT 接收通道的接收任务该函数用于启动 RMT 接收通道的接收任务,其函数原型如下所示: esp_err_t rmt_receive(rmt_channel_handle_t rx_channel, void *buffer, size_t buffer_size, const rmt_receive_config_t *config);该函数的形参描述,如下表所示: 形参描述rx_channel创建的 RMT 通道句柄buffer用于存储接收到的 RMT 符号的缓冲区buffer_size缓冲区大小config接收特定配置该函数的使用示例,如下所示: #include "driver/gpio.h" void example_fun(void) { // 声明用于存储接收到的 RMT 符号的缓冲区 rmt_symbol_word_t raw_symbols[64]; // 配置接收任务特定配置 rmt_receive_config_t receive_config; // 启动 RMT 接收通道的接收任务,并检查错误 rmt_receive(rx_channel, raw_symbols, sizeof(raw_symbols), &receive_config); } RMT TX驱动的发送 1️⃣安装 RMT 发送通道该函数用于安装 RMT 接收通道,其函数原型如下所示: esp_err_t rmt_new_tx_channel(const rmt_tx_channel_config_t *config, rmt_channel_handle_t *ret_chan);该函数的形参描述,如下表所示: 形参描述config指向配置 RMT 发送通道的指针ret_chan返回的通用 RMT 通道句柄该函数的使用示例,如下所示: #include "driver/gpio.h" // 定义示例函数 void example_fun(void) { // 声明 RMT 通道句柄 rmt_channel_handle_t tx_chan = NULL; // 定义 RMT 发送通道配置 rmt_tx_channel_config_t tx_chan_config = { .clk_src = RMT_CLK_SRC_DEFAULT, // 使用默认时钟源 .gpio_num = 0, // GPIO0 用于发送 .mem_block_symbols = 64, // 内存块大小为 64 .resolution_hz = 1 * 1000 * 1000, // 分辨率为 1 MHz .trans_queue_depth = 4, // 传输队列深度为 4 .flags.invert_out = false, // 输出不反转 .flags.with_dma = false, // 不使用 DMA }; // 调用函数安装 RMT 发送通道,并检查返回错误 ESP_ERROR_CHECK(rmt_new_tx_channel(&tx_chan_config, &tx_chan)); } 2️⃣使能 RMT 发送通道该函数用于使能 RMT 发送通道,其函数原型如下所示: esp_err_t rmt_enable(rmt_channel_handle_t channel);该函数的形参描述,如下表所示: 形参描述channel创建的 RMT 通用通道 #include "driver/gpio.h" // 定义示例函数 void example_fun(void) { rmt_channel_handle_t tx_channel = NULL; // 声明 RMT 通道句柄 rmt_enable(tx_channel); // 调用函数使能 RMT 发送通道 } 3️⃣通过 RMT 发送通道传输数据该函数用于启动 RMT 接收通道的接收任务,其函数原型如下所示: esp_err_t rmt_transmit(rmt_channel_handle_t channel, rmt_encoder_t *encoder, const void *payload, size_t payload_bytes, const rmt_transmit_config_t *config)该函数的形参描述,如下表所示: 形参描述channel创建的 RMT 通道encoder用户自己创建的编码器或者通过其它 API 构建的编码器payload要编码为 RMT 符号的原始数据payload_bytes“有效负载”的大小(以字节为单位)config发送特定配置 发送示例 #include "driver/gpio.h" #include "driver/rmt.h" // 定义示例函数 void example_fun(void) { // 1. 安装 RMT 发送通道 // 声明 RMT 通道句柄 rmt_channel_handle_t tx_chan = NULL; // 定义 RMT 发送通道配置 rmt_tx_channel_config_t tx_chan_config = { .clk_src = RMT_CLK_SRC_DEFAULT, // 使用默认时钟源 .gpio_num = GPIO_NUM_0, // GPIO0 用于发送 .mem_block_symbols = 64, // 内存块大小为 64 .resolution_hz = 1 * 1000 * 1000, // 分辨率为 1 MHz .trans_queue_depth = 4, // 传输队列深度为 4 .flags.invert_out = false, // 输出不反转 .flags.with_dma = false, // 不使用 DMA }; // 调用函数安装 RMT 发送通道,并检查返回错误 ESP_ERROR_CHECK(rmt_new_tx_channel(&tx_chan_config, &tx_chan)); // 2. 使能 RMT 发送通道 rmt_enable(tx_chan); // 调用函数使能 RMT 发送通道 // 3. 通过 RMT 发送通道传输数据 // 创建数据数组 uint8_t data[4] = {0x12, 0x34, 0x56, 0x78}; // 创建 RMT 编码器 rmt_encoder_t encoder; ESP_ERROR_CHECK(rmt_translator_init(&encoder, sizeof(data), false)); // 数据长度为4字节,不进行反转 // 创建 RMT 发送配置 rmt_transmit_config_t transmit_config = { .carrier_freq_hz = 38000, // 载波频率为38kHz .carrier_duty_percent = 50, // 载波占空比为50% .idle_level = RMT_IDLE_LEVEL_LOW, // 高电平空闲 .carrier_level = RMT_CARRIER_LEVEL_HIGH, // 高电平为载波 .loop_en = false, // 关闭循环发送 .loop_count = 0, // 循环次数为0 }; // 使用 RMT 发送通道传输数据 ESP_ERROR_CHECK(rmt_transmit(tx_chan, &encoder, data, sizeof(data), &transmit_config)); } 总结RMT驱动是ESP32的一个强大功能,它可以方便地处理各种远程控制协议,对于开发物联网和嵌入式系统具有很大的帮助。 参考资料 ESP-IDF 红外遥控 (RMT) 正点原子DNESP32S3 开发板教程-IDF 版 |
 🚨需要注意的是红外编码发送的时候,并不单单是通过高低电平发送的,是在38khz的载波下进行发送的
🚨需要注意的是红外编码发送的时候,并不单单是通过高低电平发送的,是在38khz的载波下进行发送的 NEC协议的数据格式包括以下几个部分:
NEC协议的数据格式包括以下几个部分: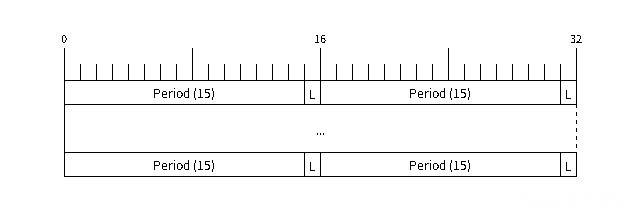
【本文地址】