CV |
您所在的位置:网站首页 › rgb颜色模型中的rgb分别是 › CV |
CV
|
文章目录
CV — 色彩空间:RGB、HSV、HLS一、 RGB(一) RGB 颜色系统
二、HSV(一) HSV颜色模型(二) 代码案例1. HSV 值进行目标物体的提取2. 使用 HSV 图像分割
三、HLS1. HLS 颜色空间2. 代码案例
参考资料
CV — 色彩空间:RGB、HSV、HLS
一、 RGB
(一) RGB 颜色系统
RGB 简介: RGB是从颜色发光的原理来设计定的,通俗点说它的颜色混合方式就好像有红、绿、蓝三盏灯,当它们的光相互叠合的时候,色彩相混,而亮度却等于三者亮度之总和,越混合亮度越高,即加法混合。 红、绿、蓝 三个颜色通道 每种色各分为 256 阶亮度(范围:0 ~ 255): 在0时“灯”最弱——是关掉的,而在255时“灯”最亮。当三色灰度数值相同时,产生不同灰度值的灰色调,即三色灰度都为 0 时(0,0,0),是最暗的黑色调;三色灰度都为255时(255,255,255),是最亮的白色调。 RGB 的局限性: 自然环境下获取的图像容易受 自然光照、遮挡和阴影 等情况的影响,即对 亮度 比较敏感。而 RGB 颜色空间的三个分量都与亮度密切相关,即只要亮度改变,三个分量都会随之相应地改变,而没有一种更直观的方式来表达。人眼对于这三种颜色分量的敏感程度是不一样的,在单色中,人眼对红色最不敏感,蓝色最敏感,所以 RGB 颜色空间是一种均匀性较差的颜色空间。如果颜色的相似性直接用欧氏距离来度量,其结果与人眼视觉会有较大的偏差。对于某一种颜色,我们很难推测出较为精确的三个分量数值来表示。总结:RGB 颜色空间适合于显示系统,却并不适合于图像处理。 二、HSV (一) HSV颜色模型HSV(Hue, Saturation, Value)是根据颜色的直观特性由 A. R. Smith 在1978年创建的一种颜色空间, 也称六角锥体模型(Hexcone Model)。 这个模型中颜色的参数分别是:色调(Hue),饱和度(Saturation),明度(Saturation)。 用下面这个圆柱体来表示 HSV 颜色空间,圆柱体的横截面可以看做是一个极坐标系 ,H 用极坐标的极角表示,S 用极坐标的极轴长度表示,V 用圆柱中轴的高度表示。 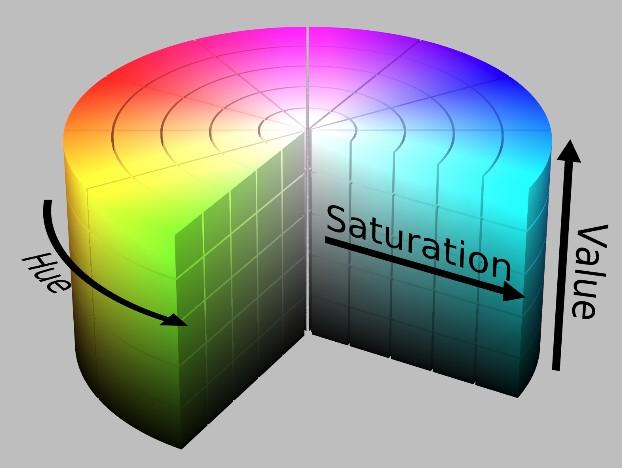
色调H: 用角度度量,取值范围为 0°~360°,表示色彩信息,从红色开始按逆时针方向计算,红色为0°,绿色为120°,蓝色为240°。 它们的补色是:黄色为60°,青色为180°,紫色为300°; 在 RGB 中 颜色由三个值共同决定,比如黄色为即 (255,0,255);在HSV中,黄色只由一个值决定,Hue = 60即可。饱和度S: 饱和度S:表示颜色接近光谱色的程度。饱和度越高,说明颜色越深,越接近光谱色;饱和度越低,说明颜色越浅,越接近白色。饱和度为0表示纯白色。通常取值范围为:0%~100%,值越大,颜色越饱和。 一种颜色,可以看成是 某种光谱色 与 白色 混合的结果。其中光谱色所占的比例愈大,颜色接近光谱色的程度就愈高,颜色的饱和度也就愈高。饱和度高,颜色则深而艳。 明度V: 明度:表示颜色明亮的程度。对于光源色,明度值与发光体的光亮度有关;对于物体色,此值和物体的透射比或反射比有关。通常取值范围为0%(黑)~ 100%(白)。明度为0表示纯黑色(此时颜色最暗)。 HSV 在线取色板: HSV 在线取色板 上面概念那么多,不如自己动手实操一下。补充理解: 描述一件物品的颜色的时候通常会说 “它是什么颜色(H)?”,“颜色深不深(S)?”,"亮不亮(V)?" 恰好可以对应 HSV 中的:色调、饱和度、明度区别点: RGB颜色空间更加面向于工业,而 HSV 更加面向于用户,大多数做图像识别这一块的都会运用HSV颜色空间,因为HSV颜色空间表达起来更加直观。 基于RGB 的局限性,在 图像处理 中使用较多的是 HSV 颜色空间,它比 RGB 更接近人们对彩色的感知经验。非常直观地表达颜色的色调、鲜艳程度和明暗程度,方便进行颜色的对比。 在 HSV 颜色空间下,比 BGR 更容易跟踪某种颜色的物体,常用于分割指定颜色的物体。 注意:在 OpenCV 中 HSV 三个分量的范围为: H = [0,179];S = [0,255];V = [0,255] 测试代码: import cv2 image = cv2.imread('000007.jpg') cv2.imshow('org_img', image) img_hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV) cv2.imshow('img_hsv', img_hsv) // 对应 hsv 三通道的值 H, S, V = cv2.split(img_hsv) cv2.waitKey(0) cv2.destroyAllWindows() (二) 代码案例 1. HSV 值进行目标物体的提取获取要跟踪物体颜色的HSV值 对一个BGR值进行颜色空间转换,得到HSV值。 >>> blue = np.uint8([[[255,0,0]]]) >>> hsv_blue = cv2.cvtColor(blue, cv2.COLOR_BGR2HSV) >>> print(hsv_blue) [[[120 255 255]]]使用该 HSV 值范围进行目标物体的提取: 提取方案: 根据 RGB 的值(如:#869C90,#899F92,#8A9E92,#8A9F8E),转换得到 HSV 各通道的数值范围然后对其中的Hue值进行加10和减10(这里的10也可以为其他值,视具体情况而定),得到Hue的范围,还要指定S和V的范围:最后整个HSV值的上限和下限为 [hue+10,100,100]和 [hue-10,255,255],S和V的下限值可以根据实际情况设置。按照以上确定好的 HSV 的范围 进行提取。 代码如下: import cv2 import numpy as np path = "compass.jpg" img = cv2.imread(path) # Convert BGR to HSV hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV) sensitivity = 15 # define range of blue color in HSV lower_blue = np.array([120-sensitivity,100,100]) upper_blue = np.array([120+sensitivity,255,255]) # Threshold the HSV image to get a range of blue color mask_blue = cv2.inRange(hsv, lower_blue, upper_blue) kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5,5)) mask_blue = cv2.morphologyEx(mask_blue, cv2.MORPH_CLOSE, kernel) # 闭运算 mask_blue = cv2.morphologyEx(mask_blue, cv2.MORPH_OPEN, kernel) # 开运算 # define range of red color in HSV lower_red_0, upper_red_0 = np.array([0,100,100]), np.array([sensitivity,255,255]) lower_red_1, upper_red_1 = np.array([180-sensitivity,100,100]), np.array([180,255,255]) # Threshold the HSV image to get a range of red color mask_0 = cv2.inRange(hsv, lower_red_0, upper_red_0) mask_1 = cv2.inRange(hsv, lower_red_1, upper_red_1) mask_red = cv2.bitwise_or(mask_0, mask_1) mask_red = cv2.morphologyEx(mask_red, cv2.MORPH_CLOSE, kernel) mask_red = cv2.morphologyEx(mask_red, cv2.MORPH_OPEN, kernel) # 合并蓝色mask和红色mask mask = cv2.bitwise_or(mask_blue, mask_red) # Bitwise-AND mask res = cv2.bitwise_and(img, img, mask=mask) cv2.imshow('image',img) cv2.imshow('mask_blue',mask_blue) cv2.imshow('mask_red',mask_red) cv2.imshow('res',res) if cv2.waitKey(0)==ord('q'): cv2.destroyAllWindows()下面分别原图,蓝色掩码,红色掩码,以及蓝色和红色区域。 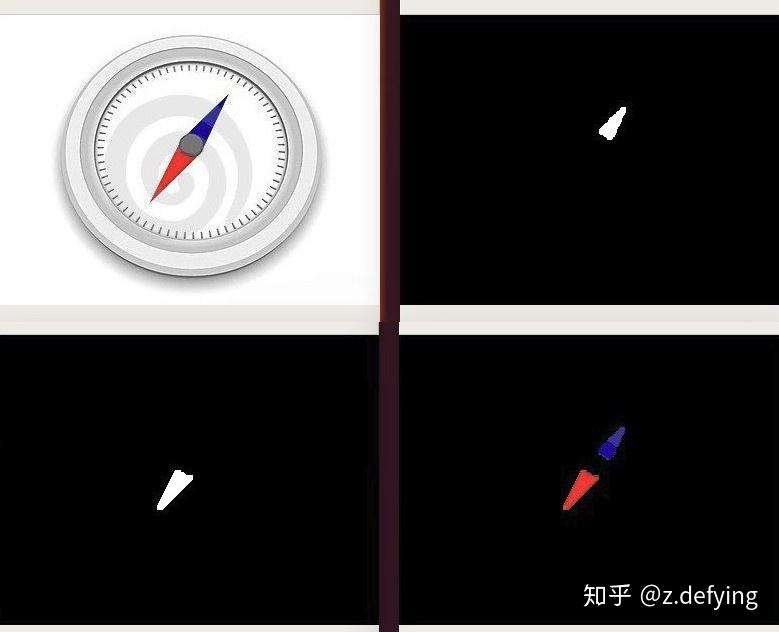 2. 使用 HSV 图像分割
2. 使用 HSV 图像分割
可以利用颜色空间进行图像分割,如果图像的颜色特征比强度特征更好,则可以尝试将其转换为HSV,然后在 H通道 上进行自适应二值化处理。 import cv2 image = cv2.imread(img_path) cv2.imshow('image', image) # Convert BGR to HLS hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV) # hsv[:, :, 0]:取hsv 中的 h(色调)的值 cv2.imshow('hsv', hsv[:,:,0]) # 在H通道上进行自适应二值化处理 (thresh, im_bw) = cv2.threshold(hsv[:,:,0], 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU) cv2.imshow('otsu', im_bw) 三、HLS 1. HLS 颜色空间HLS 也有三个分量,hue(色相)、saturation(饱和度)、lightness(亮度)。 HLS 和 HSV 的区别就是最后一个分量不同,HLS 中的 L 分量为亮度,亮度为100,表示白色,亮度为0,表示黑色; 下面是 HLS 颜色空间圆柱体: 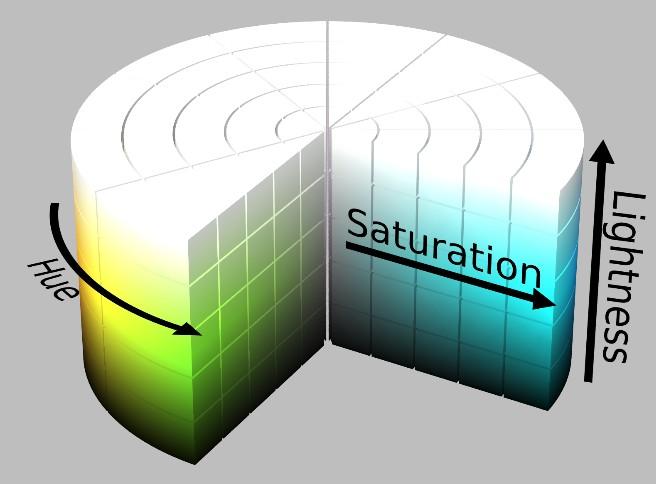
提取白色物体时,使用 HLS 更方便,因为 HSV 中的Hue里没有白色,白色需要由S和V共同决定(S=0, V=100)。而在 HLS 中,白色仅由亮度L一个分量决定。所以检测白色时使用 HSL 颜色空间更准确。 注意:在 OpenCV 中 HLS 三个分量的范围为: H = [0,179]L = [0,255]S = [0,255] 2. 代码案例 image = cv2.imread(image_label_line[0]) # Convert BGR to HLS imgHLS = cv2.cvtColor(image, cv2.COLOR_BGR2HLS) 参考资料 https://zhuanlan.zhihu.com/p/67930839 |
【本文地址】
今日新闻 |
推荐新闻 |