【Redis】集群存储算法 |
您所在的位置:网站首页 › redis集群数据存储 › 【Redis】集群存储算法 |
【Redis】集群存储算法
|
集群存储算法
一、集群存储算法1.1、分布式存储算法1.2、哈希取余算法分区1.3、一致性哈希算法1.4、哈希槽分区1.5、Redis集群存储策略
一、集群存储算法
1.1、分布式存储算法
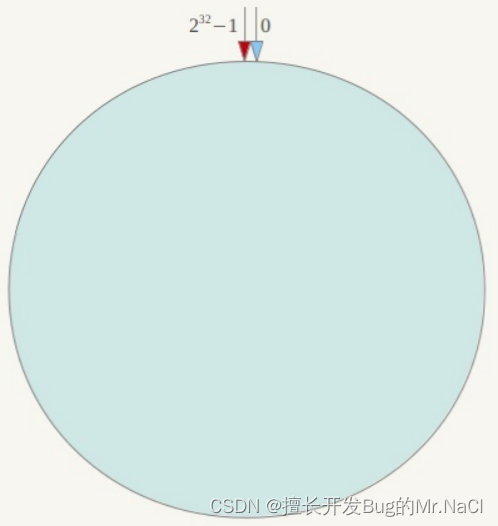
分布式存储的常见算法: 哈希取余算法分区一致性哈希算法分区哈希槽算法分区 1.2、哈希取余算法分区算法描述:hash(key) % N(其中,key是要存入Redis的键名,N是Redis集群的机器台数)。用户每次读写操作,都是根据传入的键名经过哈希运算,对机器台数取余决定该键存储在哪台服务器上。 优点:简单直接有效,只需要预估好数据规划好节点,就能保证一段时间的数据支撑。使用Hash算法让固定的一部分请求落到同一台服务器上,这样每台服务器固定处理一部分请求(并维护这些请求的信息),起到负载均衡+分而治之的作用。 缺点:原来规划好的节点,如果进行了扩容或者缩容,导致节点有变动,映射关系需要重新进行计算。在服务器个数固定不变时没问题,如果需要弹性扩容或者故障停机的情况下,原来取模公式中的 N就会发生变化,此时经过取模运算的结果就会发生很大变化,导致根据公式获取的服务器变得不可控。 1.3、一致性哈希算法算法背景:一致性哈希算法是为了解决哈希取余算法中的分布式缓存数据变动和映射问题。当服务器个数发生变化时,尽量减少影响到客户端与服务器的映射关系。 算法描述: 一致性哈希算法必然有个hash函数并按照算法产生Hash值,这个算法的所有可能哈希值会构成一个全量集,这个集合可以成为一个Hash区间[0, 2^32 - 1],这是一个线性空间。但是在这个算法中,我们通过适当的逻辑控制将它首尾相连(0 = 2^32),这样让它逻辑上形成了一个环形空间。 它也是按照使用取模的方式。前面的哈希取余算法是对节点个数进行取模,而一致性哈希算法是对 2^32取模。 简单来说,一致性Hash算法将整个哈希值空间组成一个虚拟的圆环。如假设某个哈希函数H的值空间为 0到2^32 - 1(即哈希值是一个32位无符号整形),整个哈希环如下图:整个空间按顺时针方向组织,圆环的正上方的点代表0,0点右侧的第一个点代表1,以此类推,2、3、4…直到2^32 - 1,也就是说0点左侧的第一个点代表 2^32 - 1。0 和 2^32 - 1在零点钟方向重合,我们把这个由 2^32个点组成的圆环称为Hash环。 将各个服务器使用Hash进行一个哈希,具体可以选择服务器的IP或主机名作为关键字进行哈希。这样每台机器就能确定其在哈希环上的位置。 假如4个节点NodeA、B、C、D,经过IP地址的哈希函数计算(hash(ip)),使用IP地址哈希值后在环空间的位置如下: 假如我们有ObjectA、B、C、D四个数据对象,经过哈希计算后,在环空间上的位置如下:根据一致性hash算法,数据A会被定位到NodeA上,B被定位到NodeB上,C被定位到NodeC上,D被定位到NodeD上。 一般的,在一致性Hash算法中,如果一台服务器不可用,则受影响的数据仅仅是此服务器到其环空间中前一台服务器(即沿着逆时针方向行走遇到的第一台服务器)之间的数据,其他不会受到影响。 即:假设NodeC宕机,只会影响到Hash定位到NodeB到NodeC之间的数据,并且这些数据会被转移到NodeD进行存储。 一致性Hash算法在服务节点太少时,容易因为节点分布不均匀而造成数据倾斜(被缓存的对象都集中到某一台或某几台服务器)。 对每一个服务节点计算多个哈希,每个计算结果位置都放置一个此服务节点,称为虚拟节点。具体做法可以先确定每个物理节点关联的虚拟节点数量,然后在IP或主机名后面加上编号。 例如,可以对NodeA节点虚拟出 NodeA#1、NodeA#2、NodeA#3,对NodeB虚拟出NodeB#1、NodeB#2、NodeB#3的节点,形成六个虚拟节点。 缺点:数据的分布和节点的位置有关,因为这些节点不是均匀分布在哈希环上的,所以在数据进行存储时达不到均匀部分的效果。 1.4、哈希槽分区哈希槽分区是为了解决一致性哈希算法的数据倾斜问题。 哈希槽实质上就是一个数组,数组[0, 2^14 - 1]形成的 hash slot空间。 目的是为了解决均匀分配的问题。在数据和节点之间又加入了一层,把这层称之为槽(slot),用于管理数据和节点之间的关系。就相当于节点上放的是槽,槽里面放的是数据。· 槽解决的是粒度问题,相当于把粒度变大了,这样便于数据移动。 哈希解决的是映射问题,使用key的哈希值来计算所在的槽,便于数据分配。 一个集群只能有== 16394==个槽,编号 0 - 16383(2^14 - 1)。这些槽会分配给集群中所有的主节点,分配策略没有要求。可以指定哪些编号的槽分配给哪个主节点,集群会记录节点和槽的对应关系。 解决了节点和槽的关系后,接下来就需要对key求哈希值,然后对16384取余,根据余数决定key落到哪个槽里。 1.5、Redis集群存储策略Redis集群使用的就是哈希槽。Redis集群有16384个哈希槽,每个key通过CRC16校验后对16384取模来决定放置在哪个槽,集群的每个节点负责一部分hash槽。 哈希槽数量16384(2^14)的决定原因: CRC16算法产生的hash值有 16bit,该算法可以产生 2^16 = 65536个值。但是为了心跳方便和数据传输最大化,槽的数量只能有 2^14个。 如果槽位数量为65535个,那么发送心跳信息的消息头将达到 8k,发送的心跳包过于庞大。在消息头中最占空间的是 myslots[CLUSTER_SLOTS/8]。当槽位为65536时,这块的大小是 : 65536 ÷ 8 ÷ 1024 = 8Kb每秒中redis节点需要发送一定数量的ping消息作为心跳,如果槽位为65536,那么这个ping消息头就会太大浪费带宽。 redis集群的主节点数量基本不可能超过1000个。集群节点越多,心跳包的消息体内携带的数据越多。如果节点超过1000个,也会导致网络拥堵。因此redis作者不建议redis cluster节点超过1000个。对于节点数在1000以内的redis cluster集群,16384个槽位足够了,没有必要扩展到65536个。槽位越小,节点少的情况下压缩比越高,容易传输。Redis主节点的配置信息中它锁负责的哈希槽是通过一张bitmap的形式来保存的,在传输过程中会对bitmap进行压缩,但是如果bitmap的填充率 slots / N(N为节点数)很高的话,bitmap的压缩率就很低。如果节点数很少,而哈希槽数很多的话,bitmap的压缩率就很低。 |
 有了哈希环之后,还需要进行节点映射,将集群中各个IP节点映射到环上的某一个位置。
有了哈希环之后,还需要进行节点映射,将集群中各个IP节点映射到环上的某一个位置。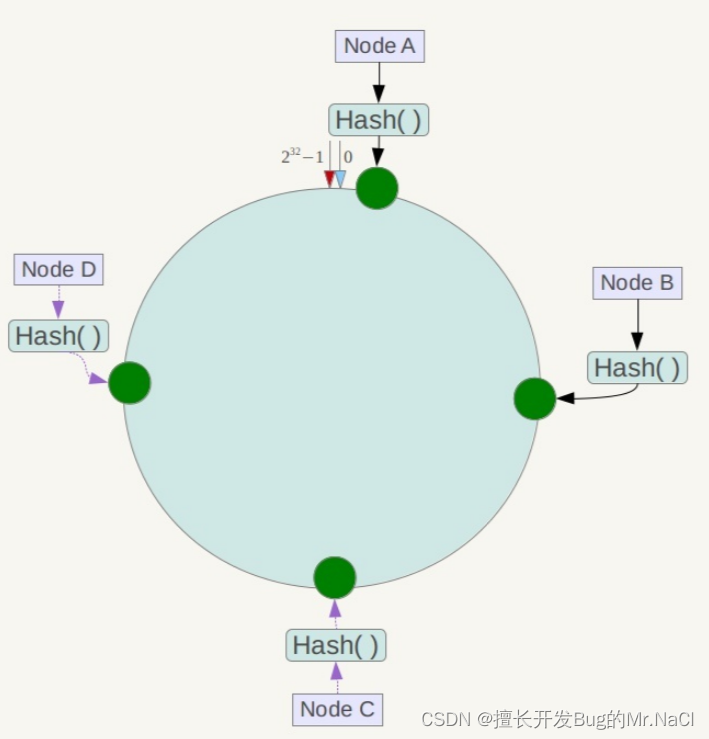 key落到服务器的落键规则。当我们需要存储一个key键值对时,首先计算key的hash值(hash(key)),将这个key使用相同的函数hash,计算出哈希值并确定此数据在环上的位置,从此位置沿环顺时针“行走”,第一台遇到的服务器就是其应该定位到的服务器,并将该键值对存储字该节点上。
key落到服务器的落键规则。当我们需要存储一个key键值对时,首先计算key的hash值(hash(key)),将这个key使用相同的函数hash,计算出哈希值并确定此数据在环上的位置,从此位置沿环顺时针“行走”,第一台遇到的服务器就是其应该定位到的服务器,并将该键值对存储字该节点上。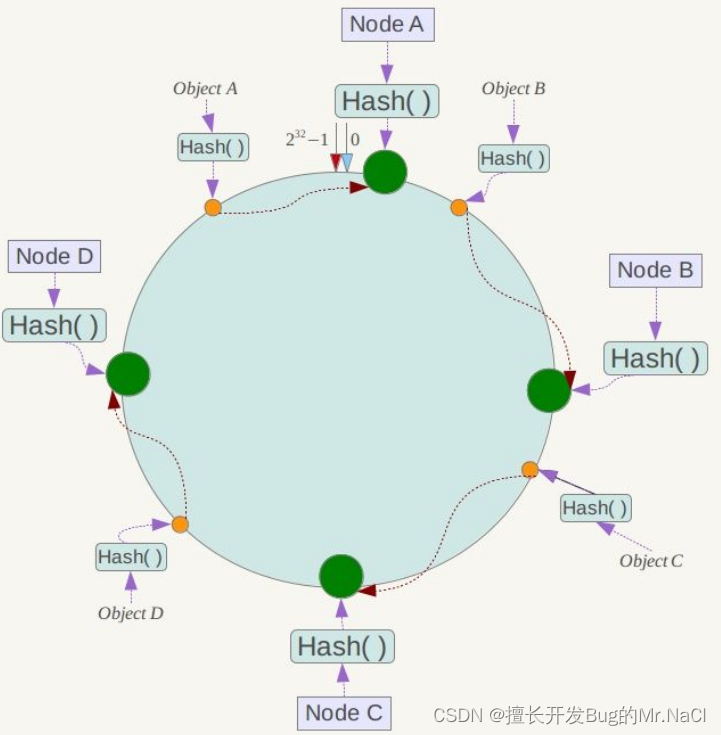 假设NodeC宕机,可以看到此时对象A、B、D不会受到影响,只有C对象被重新定位到NodeD。
假设NodeC宕机,可以看到此时对象A、B、D不会受到影响,只有C对象被重新定位到NodeD。 假如需要扩容增加一台节点NodeX,NodeX的hash(ip)位于NodeB和NodeC之间,那受到影响的就是NodeB 到 NodeX 之间的数据。重新将B到X的数据录入到X节点上即可,不会导致Hash取余全部数据重新洗牌的后果。
假如需要扩容增加一台节点NodeX,NodeX的hash(ip)位于NodeB和NodeC之间,那受到影响的就是NodeB 到 NodeX 之间的数据。重新将B到X的数据录入到X节点上即可,不会导致Hash取余全部数据重新洗牌的后果。 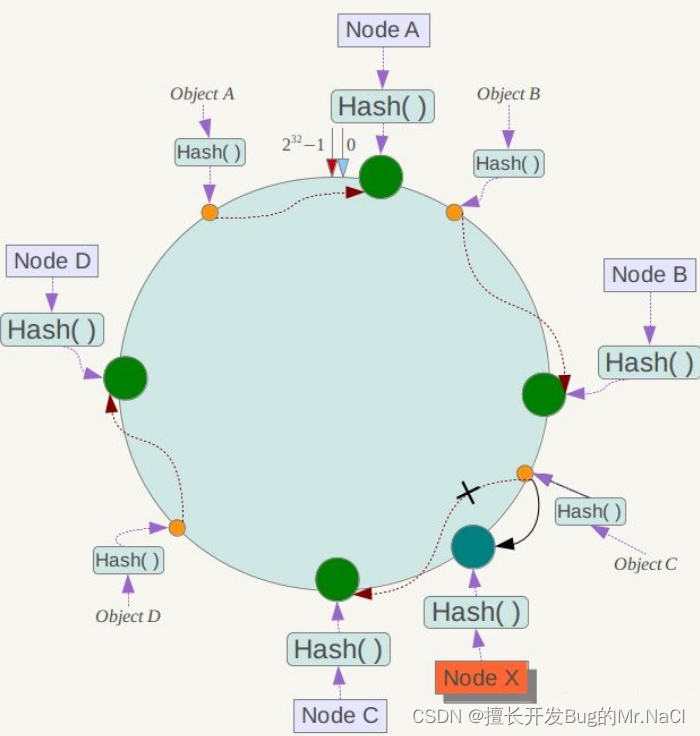 但是Hash环会存在数据倾斜问题。
但是Hash环会存在数据倾斜问题。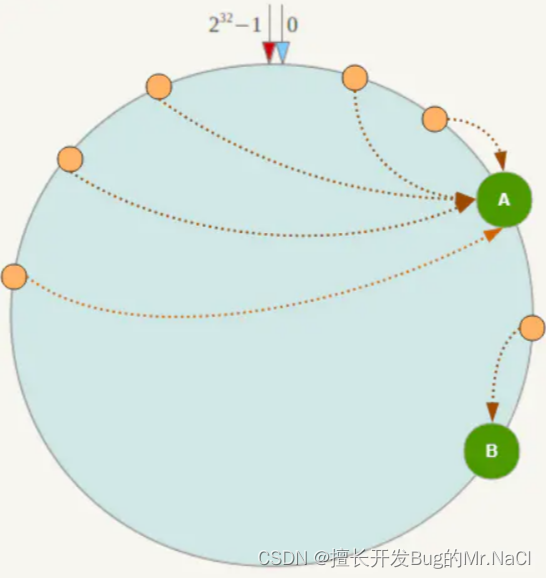 为了解决数据倾斜问题,一致性哈希算法引入了虚拟节点机制。
为了解决数据倾斜问题,一致性哈希算法引入了虚拟节点机制。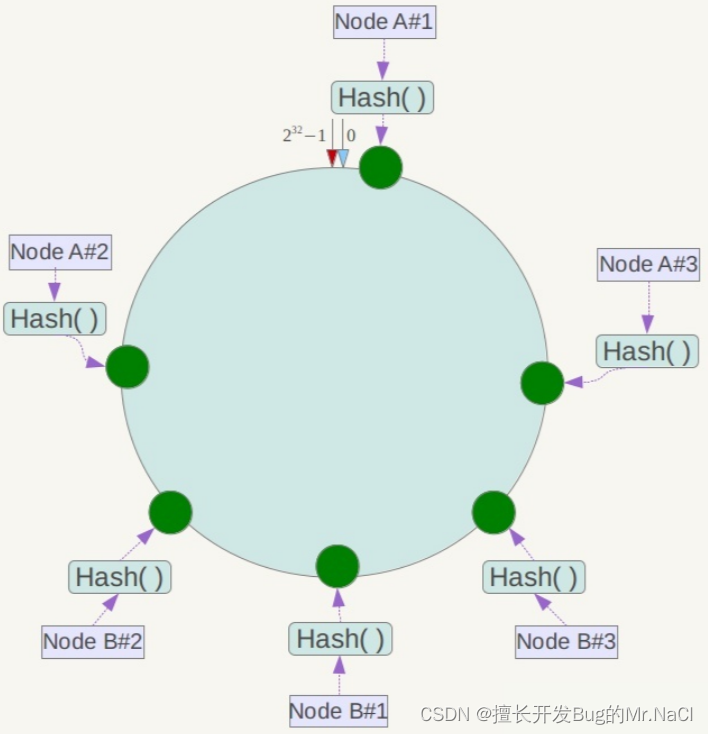 优点:加入和删除节点时,只会影响哈希环中顺时针方向相邻节点,对其他节点无影响。
优点:加入和删除节点时,只会影响哈希环中顺时针方向相邻节点,对其他节点无影响。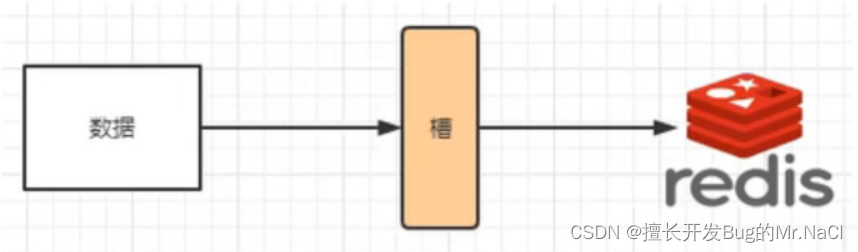
【本文地址】
今日新闻 |
推荐新闻 |