规划控制之路径规划(QP篇) |
您所在的位置:网站首页 › python约束条件输入 › 规划控制之路径规划(QP篇) |
规划控制之路径规划(QP篇)
|
本文基于Piecewise Jerk Path Optimizer方法进行python实现,Piecewise Jerk Path Optimizer的相关知识点可参考文末的两篇文章,本文主要是进行该算法的问题构造和实现。 输入输出Piecewise Jerk Path Optimizer方法的核心思想是使用二次规划的方法寻找最优路径。 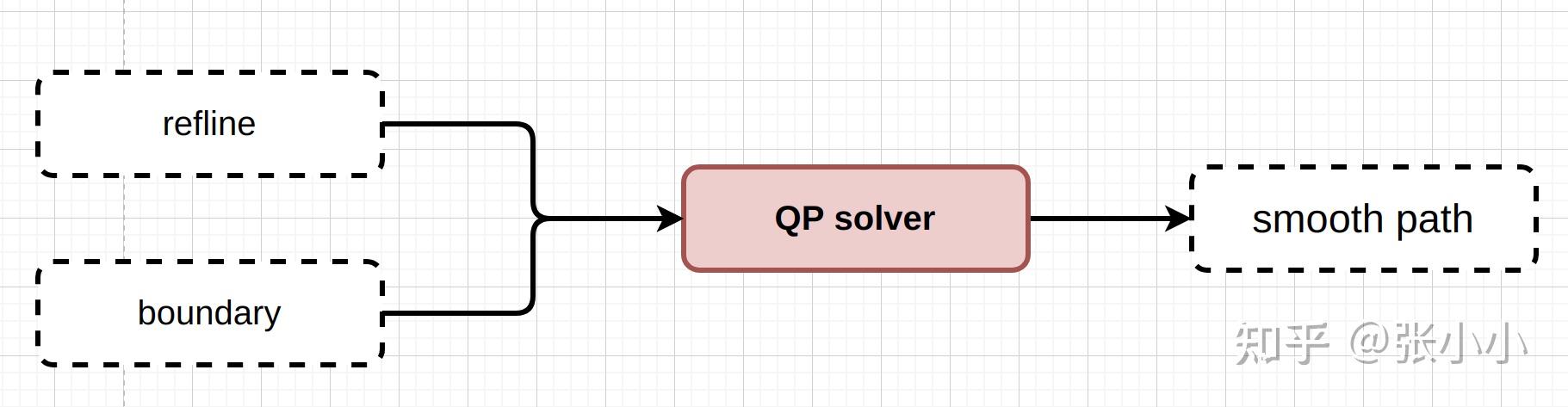 qp求解器的输入与输出 qp求解器的输入与输出上图为qp求解器的输入输出,其中输入包括参考线refline和路径的规划边界boundary。其中refline在NOA模式下和pilot模式下来源有所区别。当系统在NOA模式下时(有高精地图),参考线需要从地图中获取;pilot模式下则从感知识别到的车道线中直接提取。这两种中心线都或多或少存在不平滑或者上下拍不连续的问题。由于目前主流的地图中对地图中心线并未做比较好的路径平滑(有时间写一篇关于中心线的平滑方法),因此规划拿到中心线后需要做平滑处理,然后再输入给路径求解器;boundary则是提取出可行路径,综合考虑车道线、障碍物提取出有用的边界作为qp求解器的约束条件,这里其实是将非凸问题转化为凸问题。 问题构造对于二次规划问题,一般的问题构造步骤为: 确定优化变量确定目标函数确定约束条件将目标函数和约束条件变形为二次规划的标准形式确定优化变量对于路径规划,我们需要求解的变量是路径点,为了达到舒适稳定的效果,需要优化的变量包括与参考的偏移量、偏移量一阶导、二阶导等(优化变量可自行设定)。因此,x定义如下: x=\begin{bmatrix} x_0 \\[4pt] x_1\\[4pt]\vdots \\[4pt]x_{n-1}\\[4pt]x'_0\\[4pt]x'_1\\[4pt]\vdots\\[4pt]x'_{n-1}\\[4pt]x''_0\\[4pt]x''_1\\[4pt]\vdots\\[4pt]x''_{n-1} \end{bmatrix}\in R^{3n \times 1} 确定目标函数目前函数设计为所有优化变量与目标偏差的平方和形式,如下所示: J=w_x\sum^{n-1}_{i=0}(x_i-r_i)^2+w_{x'}\sum^{n-1}_{i=0}(x'_i)^2+w_{x''}\sum^{n-1}_{i=0}(x''_i)^2+w_{x'''}\sum^{n-2}_{i=0}(x'''_i)^2 其中 x_i 表示侧向偏移量, r_i 为参考偏移量。 x'_i,x''_i,x'''_i 分别表示侧向偏移量对路径 s 的一阶导、二阶导和三阶导。该式表明,我们的目标优化指标是使得与参考线的偏差量、侧向偏移的一阶导、二阶导、三阶导足够小。 确定约束条件约束主要包含四种:偏移量,一阶导,二阶导,三阶导。即规划出的路径上的每个点偏移参考线的约束,不能超过一定的范围;一阶导、二阶导、三阶导则是对侧向速度、加速度的进一步限制。其实这里最好是描述成曲率的形式,因为曲率与运动学、动力学是直接相关的,偏移量的n阶导并不能直观反应到运动学上。 qp problemmin\{\frac{1}{2}x^TPx+qx\}\\l\le Ax\le u 如上为qp问题的形式,本文使用osqp进行二次规划问题的求解。 构造P和q矩阵结合我们的目标函数和qp问题,我们可以拆解出P和q矩阵。 由 x'''_i\Delta s=x''_{i+1}-x''_i ,得到 x'''_i=\frac{x''_{i+1}-x''_i}{\Delta s} ,将其带入J中,可得 J=w_x\sum^{n-1}_{i=0}[(x_i)^2+(r_i)^2-2x_ir_i]+w_{x'}\sum^{n-1}_{i=0}(x'_i)^2+w_{x''}\sum^{n-1}_{i=0}(x''_i)^2+\frac{w_{x'''}}{\Delta s^2}\sum^{n-2}_{i=0}[(x''_{i+1})^2+(x''_i)^2-2x''_{i+1}x''_i] 整理可得(去掉常数项): J=w_x\sum^{n-1}_{i=0}[(x_i)^2-2x_ir_i]+w_{x'}\sum^{n-1}_{i=0}(x'_i)^2+(w_{x''}+\frac{2w_{x'''}}{\Delta s^2})\sum^{n-1}_{i=0}(x''_i)^2-\frac{w_{x'''}}{\Delta s^2}((x''_0)^2+(x''_{n-1})^2)-\frac{2w_{x'''}}{\Delta s^2}\sum^{n-2}_{i=0}(x''_{i+1}x''_i) 由于 x=\begin{bmatrix} x_0 \\[4pt] x_1\\[4pt]\vdots \\[4pt]x_{n-1}\\[4pt]x'_0\\[4pt]x'_1\\[4pt]\vdots\\[4pt]x'_{n-1}\\[4pt]x''_0\\[4pt]x''_1\\[4pt]\vdots\\[4pt]x''_{n-1} \end{bmatrix}\in R^{3n \times 1} 令 J=x^TPx+2qx ,则可构建P和q矩阵(这里比较抽象,需要对照目标函数和qp问题进行确认): P_x=\begin{bmatrix} w_x &0& \ldots&0\\0&w_x&\ldots&0\\\vdots&\vdots&\ddots&\vdots\\0&0&\ldots&w_x \end{bmatrix}\in R^{n \times n} , P_{x'}=\begin{bmatrix} w_{x'} &0& \ldots&0\\0&w_{x'}&\ldots&0\\\vdots&\vdots&\ddots&\vdots\\0&0&\ldots&w_{x'} \end{bmatrix}\in R^{n \times n} P_{x''}=\begin{bmatrix} w_{x''}+\frac{w_{x'''}}{\Delta s^2} &0& \ldots&0&0\\[8pt]-\frac{2w_{x'''}}{\Delta s^2}&w_{x''}+\frac{2w_{x'''}}{\Delta s^2}&\ldots&0&0\\[8pt]\vdots&\vdots&\ddots&\vdots&\vdots\\[8pt]0&0&\ldots&w_{x''}+\frac{2w_{x'''}}{\Delta s^2}&0\\[8pt]0&0&\ldots&-\frac{2w_{x'''}}{\Delta s^2}&w_{x''}+\frac{w_{x'''}}{\Delta s^2} \end{bmatrix}\in R^{n \times n} P=\begin{bmatrix} P_x &0&0\\0&P_{x'}&0\\0&0&P_{x''} \end{bmatrix}\in R^{3n \times 3n} ,q=\begin{bmatrix} -r_0\\-r_1\\\vdots\\-r_{n-1}\\0\\\vdots\\0 \end{bmatrix}^T\in R^{1 \times 3n} 构造不等式矩阵不等式形式为 l\le Ax\le u ,我们需要求解A和l、u。 约束有四种:偏移量,一阶导,二阶导,三阶导,未知数有三种:偏移量,一阶导,二阶导。由于三阶导不是未知数,所以通过辛普森公式建立它与未知数间的关系(可以不使用辛普森,如 x'''_i=\frac{x''_{i+1}-x''_i}{\Delta s} ): x_{i+1}=x_i+x'_i\Delta s+\frac{1}{2}\Delta s^2x''_i+\frac{1}{6}\Delta s^3x'''_i\\ x'_{i+1}=x'_i+x''_i\Delta s+\frac{1}{2}\Delta s^2x'''_i 将 x'''_i 提取出来,可以得到: x'''_i\frac{\Delta s^3}{6}=x_{i+1}-x_i-x'_i\Delta s-\frac{1}{2}\Delta s^2x''_i\\x'''_i\frac{\Delta s^2}{2}=x'_{i+1}-x'_i-x''_i\Delta s 此处,对于三阶导。我们构造的其实是一个等式约束,此时 l=u 。 观察矩阵的维度,对号入座进行匹配,可以得到: A_x=I \in R^{3n\times3n}, A_{ds}=-\Delta sI \in R^{n\times n}, A_{ds^2}=-\frac{1}{2}\Delta s^2I \in R^{n\times n}\\ A_{I}=\begin{bmatrix} -1 &1& 0&\ldots&0 \\0&-1&1&\ldots&0 \\\vdots&\vdots&\ddots&\ddots&\vdots \\0&0&\ldots&-1&1 \\0&0&\ldots&0&-1 \end{bmatrix}\in R^{n \times n} , A=\begin{bmatrix} &A_x\\A_I&A_{ds}&A_{ds^2} \\0&A_I&A_{ds} \end{bmatrix}\in R^{5n \times 3n} 上下边界: l=\begin{bmatrix} x_{0l}\\[8pt]\vdots \\[8pt]x_{(n-1)l}\\[8pt]x'_{0l}\\[8pt]\vdots\\[8pt]x'_{(n-1)l}\\[8pt]x''_{0l}\\[8pt]\vdots\\[8pt]x''_{(n-1)l}\\[8pt]-\frac{\Delta s^3}{6}x'''_{bound}\\[8pt]\vdots\\[8pt]-\frac{\Delta s^3}{6}x'''_{bound}\\[8pt]-\frac{\Delta s^2}{2}x'''_{bound}\\[8pt]\vdots\\[8pt]-\frac{\Delta s^2}{2}x'''_{bound} \end{bmatrix}\in R^{5n \times 1} , u=\begin{bmatrix} x_{0u}\\[8pt]\vdots \\[8pt]x_{(n-1)u}\\[8pt]x'_{0u}\\[8pt]\vdots\\[8pt]x'_{(n-1)u}\\[8pt]x''_{0u}\\[8pt]\vdots\\[8pt]x''_{(n-1)u}\\[8pt]\frac{\Delta s^3}{6}x'''_{bound}\\[8pt]\vdots\\[8pt]\frac{\Delta s^3}{6}x'''_{bound}\\[8pt]\frac{\Delta s^2}{2}x'''_{bound}\\[8pt]\vdots\\[8pt]\frac{\Delta s^2}{2}x'''_{bound} \end{bmatrix}\in R^{5n \times 1} 以上,我们的qp问题就已构造完毕。 Python实现构造好矩阵后,使用Python进行实现(注:需要安装osqp库才能求解)。 import matplotlib.pyplot as plt import osqp import numpy as np from scipy import sparse import random # |
【本文地址】
今日新闻 |
推荐新闻 |