使用Python可视化数据,机器人开发编程 |
您所在的位置:网站首页 › python写机器人程序 › 使用Python可视化数据,机器人开发编程 |
使用Python可视化数据,机器人开发编程
|
机器学习开发,与Mail.Ru Search数据分析负责人Egor Polusmak和Mail.Ru Group数据科学家Yury Kashnitsky一起探索如何使用Python可视化数据。
在机器学习领域中,可视化并不仅仅用来制作漂亮的报表。项目的各个阶段都大量使用可视化技术。 在开始一项新任务时,通过可视化手段探索数据往往是任务的第一步。我们通过图表汇总数据,放弃无关紧要的细节。相比直接阅读许多行原始数据,可视化能更好地帮助人类把握数据的要点。令人惊叹的是,仅仅通过可视化工具创建一些看上去再简单不过的图表,就能获得大量洞见。 接着,在分析模型表现和模型报告的结果时,我们也常常使用可视化。有时候,为了理解复杂的模型,我们需要将高维空间映射为视觉上更直观的二维或三维图形。 总而言之,可视化是一个相对快捷的从数据中获取新知的手段。因此,学习这一极为重要的技术,并将其纳入你的日常机器学习工具箱,是至关重要的。 本文将使用pandas、matplotlib和seaborn等流行的库,带你上手可视化。 概览 数据集 单变量可视化数量和类型分布 多变量可视化变量间的相互作用 全数据集一窥高维空间 作业二 相关资源 下面的材料以Jupyter notebook的形式查看效果最佳。如果你克隆了本教程的代码仓库,你也可以在本地运行。 1. 数据集 首先初始化环境: import numpy as np import pandas as pd pd.options.display.max_columns = 12 # 禁用Anaconda警告 import warnings warnings.simplefilter('ignore') # 在Jupyter Notebook内部显示图形 %matplotlib inline import matplotlib.pyplot as plt # 我们将使用Seaborn库 import seaborn as sns sns.set() # SVG格式的图像更清晰 %config InlineBackend.figure_format = 'svg' # 增加默认的绘图尺寸 from pylab import rcParams rcParams['figure.figsize'] = 5, 4 在第一篇文章中,我们使用的是某电信运营商的客户离网率数据。这里我们仍旧使用这个数据集。 df = pd.read_csv('../../data/telecom_churn.csv') df.head()
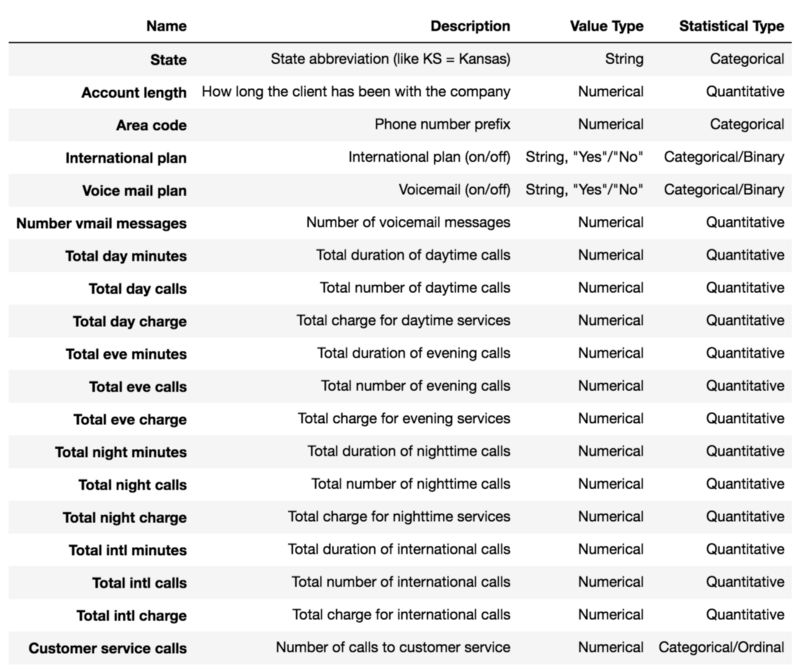
数据集的特征:
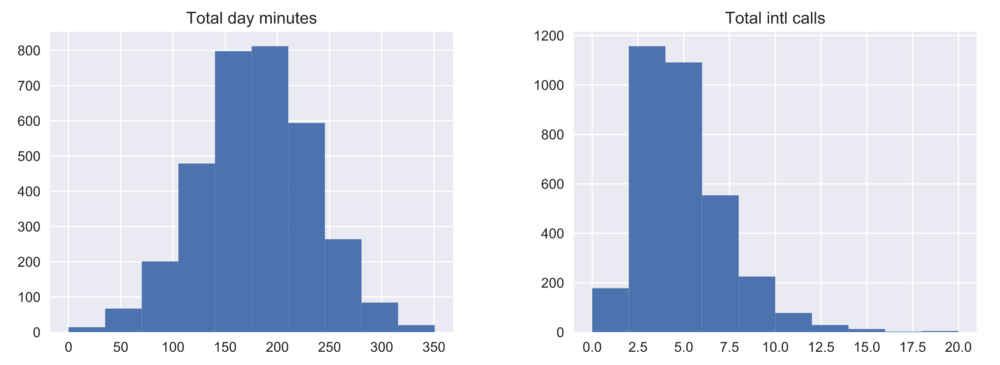
2. 单变量可视化 单变量(univariate)分析一次只关注一个变量。当我们独立地分析一个特征时,我们通常最关心的是该特征的值的分布,而忽略数据集中的其他变量。 下面我们将考虑不同统计类型的变量,以及相应的可视化工具。 2.1 数量特征 数量特征(quantitative feature)的值为有序数值。这些值可能是离散的,例如整数,也可能是连续的,例如实数,通常用于表示技术和度量。 直方图和密度图 最简单的查看数值变量分布的方法是使用DataFrame的hist()方法绘制它的直方图(histogram)。 features = ['Total day minutes', 'Total intl calls'] df[features].hist(figsize=(12, 4));
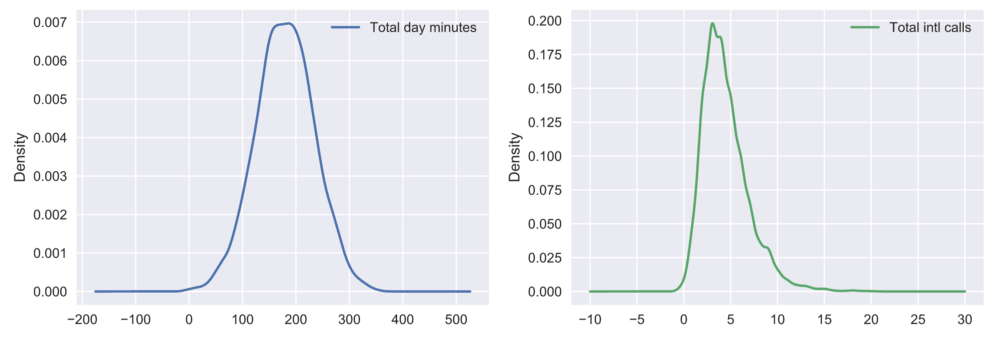
直方图依照相等的范围将值分组为柱。直方图的形状可能包含了数据分布的线索:高斯、指数,等等。当分布基本上很有规律,但有一些异常值时,你也可以通过直方图辨认出形状的歪斜之处。当你使用预设某一特定分布类型(通常是高斯)的机器学习方法时,知道特征值的分布是非常重要的。 在以上图形中,我们看到变量Total day minutes(每日通话时长)呈正态分布(译者注:正态分布即高斯分布),而Total intl calls(总国际呼叫数)显著右倾(它右侧的尾巴更长)。 除了直方图,理解分布的另一个(经常更清楚的)方法是密度图(density plots),也叫(更正式的名称)核密度图(Kernel Density Plots)。它们可以看成是直方图平滑过的版本。相比直方图,它们的主要优势是不依赖于柱的尺寸。让我们为上面两个变量创建密度图: df[features].plot(kind='density', subplots=True, layout=(1, 2), sharex=False, figsize=(12, 4));
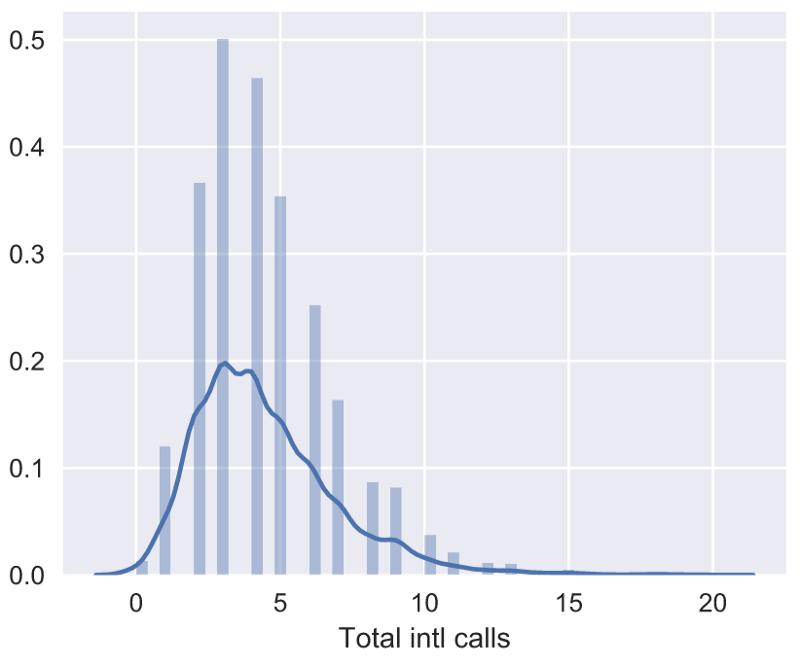
我们也可以使用seaborn的distplot()方法绘制观测数据的分布。例如,Total day minutes(每日通话时长)的分布。默认情况下,图形将同时显示直方图和核密度估计(kernel density estimation,KDE)。 sns.distplot(df['Total intl calls']);
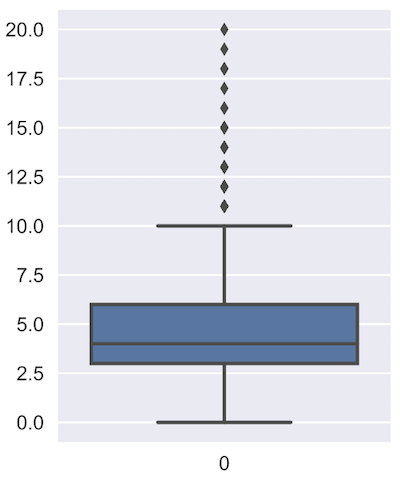
这里直方图的柱形的高度已经归一过了,表示的是密度而不是样本数。 箱形图 箱形图(box plot)是另一种有用的可视化图形。使用seaborn绘制箱形图: _, ax = plt.subplots(figsize=(3, 4)) sns.boxplot(data=df['Total intl calls'], ax=ax);
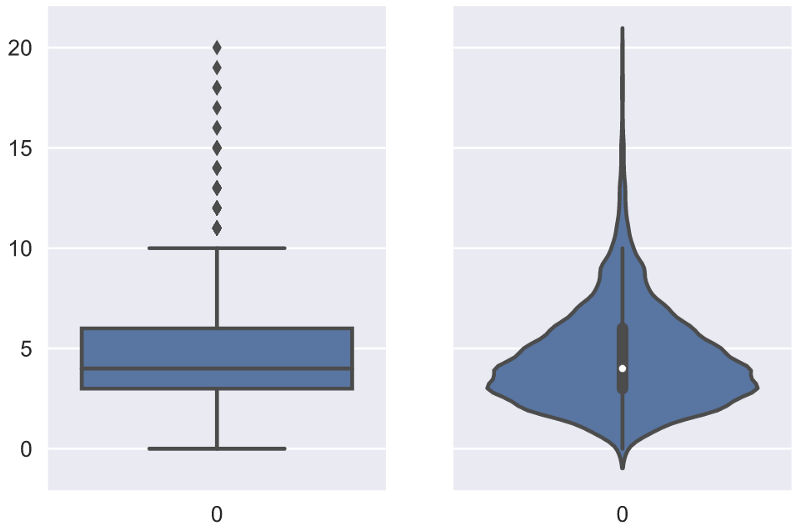
箱形图的主要组成部分是箱子(box)(显然,这是它被称为箱形图的原因),须(whisker)和一些单独的数据点(离群值)。 箱子显示了分布的四分位距;它的长度由25%(Q1,下四分位数)和75%(Q3,上司分位数)决定。箱中的水平线表示中位数(50%)。 从箱子处延伸出来的线被称为须。它们表示数据点的总体散布,具体而言,是位于区间(Q1 - 1.5xIQR, Q3 + 1.5xIQR)的数据点,其中IQR = Q3 - Q1,也就是四分位距。 离群值是须之外的数据点,它们作为单独的数据点,沿着中轴绘制。 我们可以看到,在我们的数据中,大量的国际呼叫是相当少见的。 提琴形图 我们最后考虑的分布图形是提琴形图(violin plot)。 下图左侧是箱形图,右侧是提琴形图。 _, axes = plt.subplots(1, 2, sharey=True, figsize=(6, 4)) sns.boxplot(data=df['Total intl calls'], ax=axes[0]); sns.violinplot(data=df['Total intl calls'], ax=axes[1]);
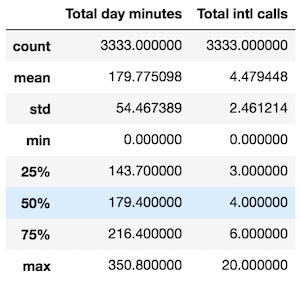
箱形图和提琴形图的区别是,箱形图显示了单独样本的特定统计数据,而提琴形图聚焦于平滑后的整体分布。 describe() 图形工具之外,我们可以使用DataFrame的describe()方法来获取分布的精确数值统计: df[features].describe()
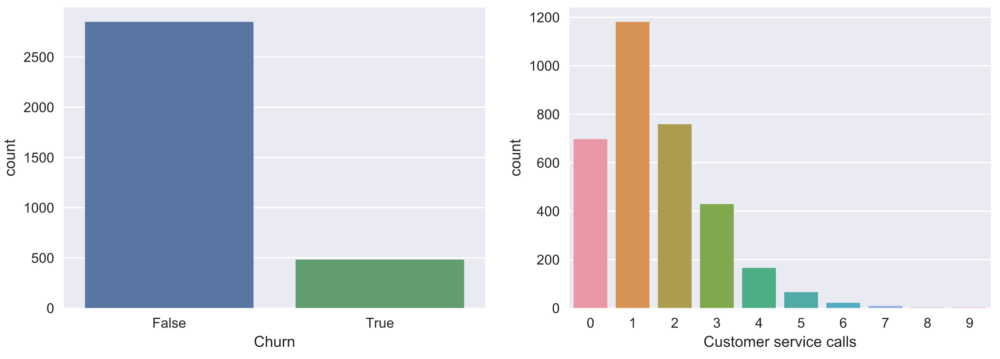
describe()的输出基本上是自解释性的。 2.2 类别和二元特征 类别特征(categorical features take)具有固定数目的值。每个值将一个观测数据分配到相应的组,这些组称为类别(category)。类别反映了样本的某个定性属性。二元(binary)变量是一个重要的类别变量的特例,其中类别的可能值正好为2. 如果类别变量的值具有顺序,称为有序(ordinal)类别变量。 频率表 让我们查看下数据集的分类平滑:目标变量离网率的分布。首先,我们使用value_counts()得到一张频率表: df['Churn'].value_counts() False 2850 True 483 Name: Churn, dtype: int64 默认情况下,频率由高到低排列。 在我们的例子中,数据是失衡的,也就是说,数据集中忠实客户和不忠实客户的比例并不相等。只有一小部分的客户取消了他们的电信服务订阅。我们将在以后的文章中看到,这一事实可能暗示衡量分类表现时存在一些限制,以后我们可能额外惩罚我们的模型在预测少数“离网”分类时所犯的错误。 条形图 频率表的图形化表示是条形图。创建条形图最简单的方法是使用seaborn的countplot()函数。seaborn中还有一个函数,起了一个令人困惑的名字(barplot()),barplot()绝大部分情况下用于表示以某个类别特征分组的数值变量的一些基本统计数据。 _, axes = plt.subplots(nrows=1, ncols=2, figsize=(12, 4)) sns.countplot(x='Churn', data=df, ax=axes[0]); sns.countplot(x='Customer service calls', data=df, ax=axes[1]);
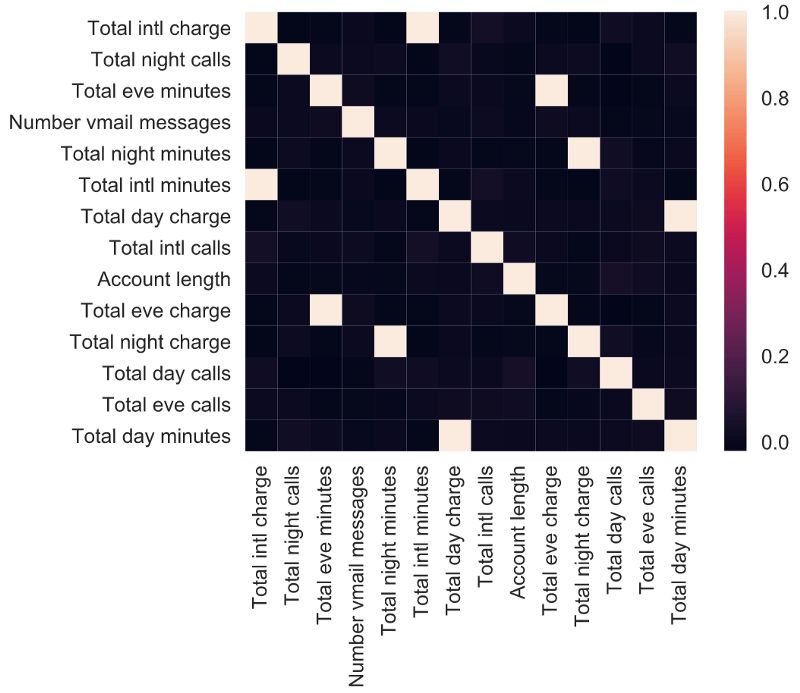
尽管条形图和上面提到的直方图看起来很像,它们是不一样的: 直方图用于查看数值变量的分布,而条形图用于类别特征。 直方图的X轴是数值;条形图的X轴可能是任何类型:数字、字符串、布尔值。 直方图的X轴是一根笛卡尔坐标轴;条形的顺序没有事先定义。不过,值得注意的是,条形经常按照高度排序,也就是值的频率。同时,当我们考虑有序变量(例如Customer service calls(客服呼叫数))时,条形通常按照变量的值排序。 左侧的图形生动地显示了目标变量的失衡性。右侧Customer service calls(客服呼叫数)的条形图暗示了大部分客户最多打了2-3个客服电话就解决了他们的问题。不过,既然我们想要预测少数分类,我们可能对少数不满意的客户的表现更感兴趣。很可能条形图的尾巴包含了大部分的离网客户。目前这只是假想,让我们来看一些更有趣、更强大的可视化技术。 3. 多变量可视化 多变量(multivariate)图形让我们得以在单张图像中查看两个以上变量的联系。和单变量图形一样,可视化的类型取决于将要分析的变量的类型。 3.1 数量——数量 我们先来看看数量变量之间的相互作用。 相关矩阵 让我们看下数据集中的数值变量的相关性。这一信息很重要,因为有一些机器学习算法(比如,线性回归和逻辑回归)不能很好地处理高度相关的输入变量。 首先,我们使用DataFrame的corr()方法计算出每对特征间的相关性。接着,我们将所得的相关矩阵(correlation matrix)传给seaborn的heatmap()方法,该方法根据提供的数值,渲染出一个基于色彩编码的矩阵: # 丢弃非数值变量 numerical = list(set(df.columns) - set(['State', 'International plan', 'Voice mail plan', 'Area code', 'Churn', 'Customer service calls'])) # 计算和绘图 corr_matrix = df[numerical].corr() sns.heatmap(corr_matrix);
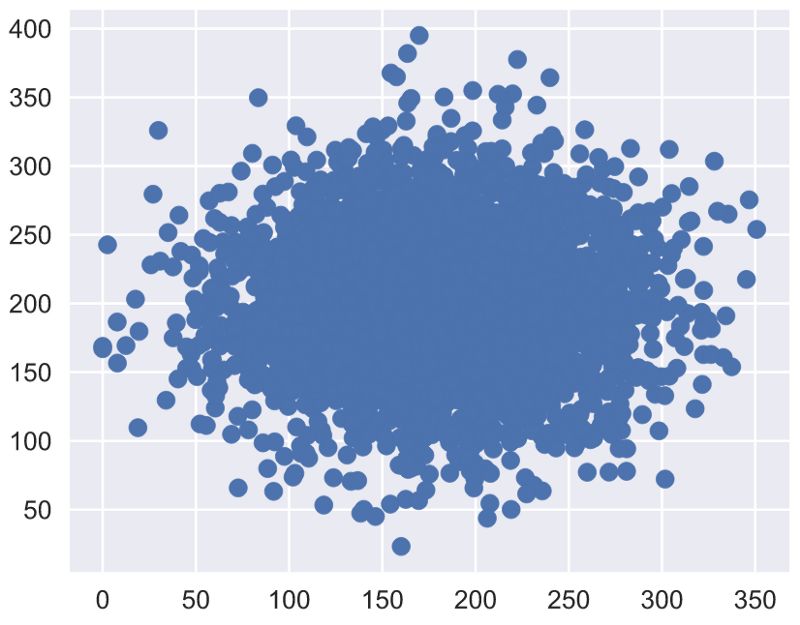
从上图我们可以看到,Total day charge(日话费总额)直接基于电话的分钟数计算得到(Total day minutes),这样的变量有4个。这4个变量称为因变量(dependent variable),可以直接去除,因为它们并不贡献任何额外信息。让我们去掉它们: numerical = list(set(numerical) - set(['Total day charge', 'Total eve charge', 'Total night charge', 'Total intl charge'])) 散点图 散点图(scatter plot)将两个数值变量的值显示为二位空间中的笛卡尔坐标(Cartesian coordinate)。还有三维的散点图。 让我们试下matplotlib库的scatter()方法: plt.scatter(df['Total day minutes'], df['Total night minutes']);
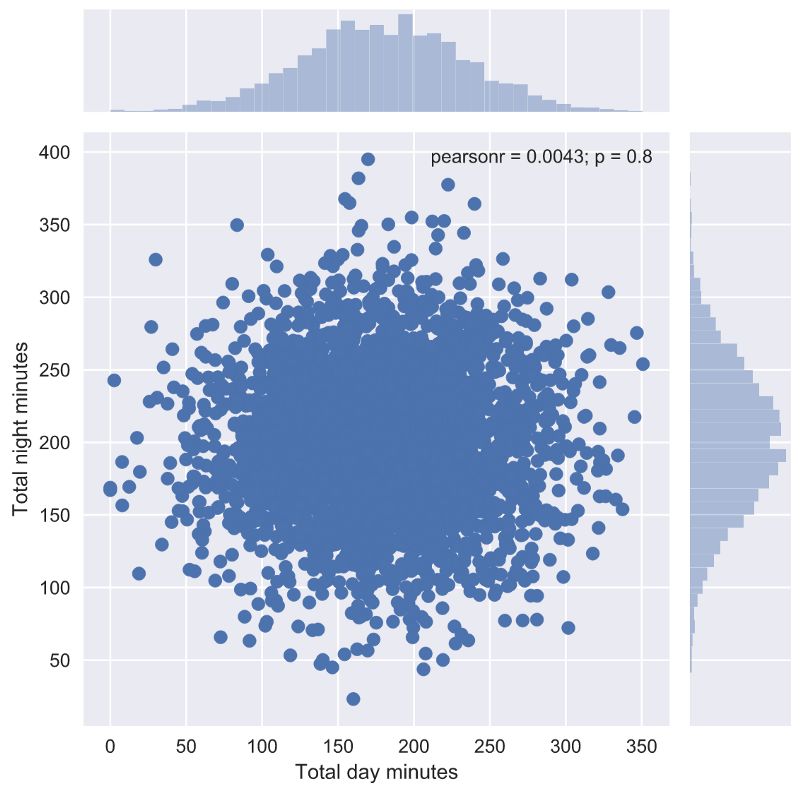
我们得到了两个正态分布变量的散点图,这张图没什么意思。看起来这两个变量并不相关,因为类似椭圆的形状和轴是对齐的。 seaborn库创建的散点图有一个略微奇特的选项: sns.jointplot(x='Total day minutes', y='Total night minutes', data=df, kind='scatter');
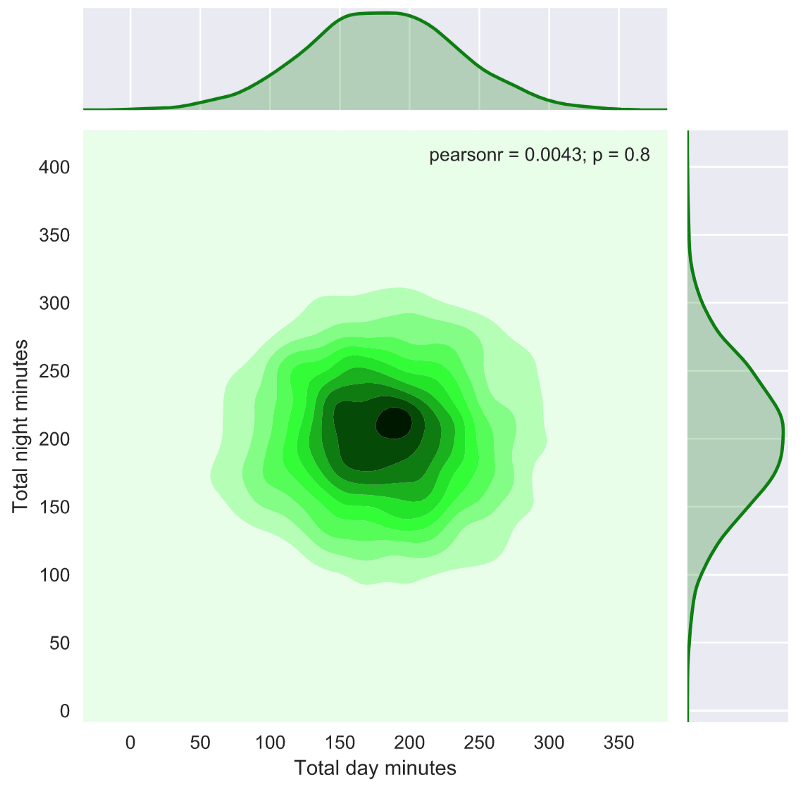
jointplot()函数绘制了两张直方图,某些情形下它们可能会有用。这一函数还可以让我们绘制平滑过的joint plot: sns.jointplot('Total day minutes', 'Total night minutes', data=df, kind="kde", color="g");
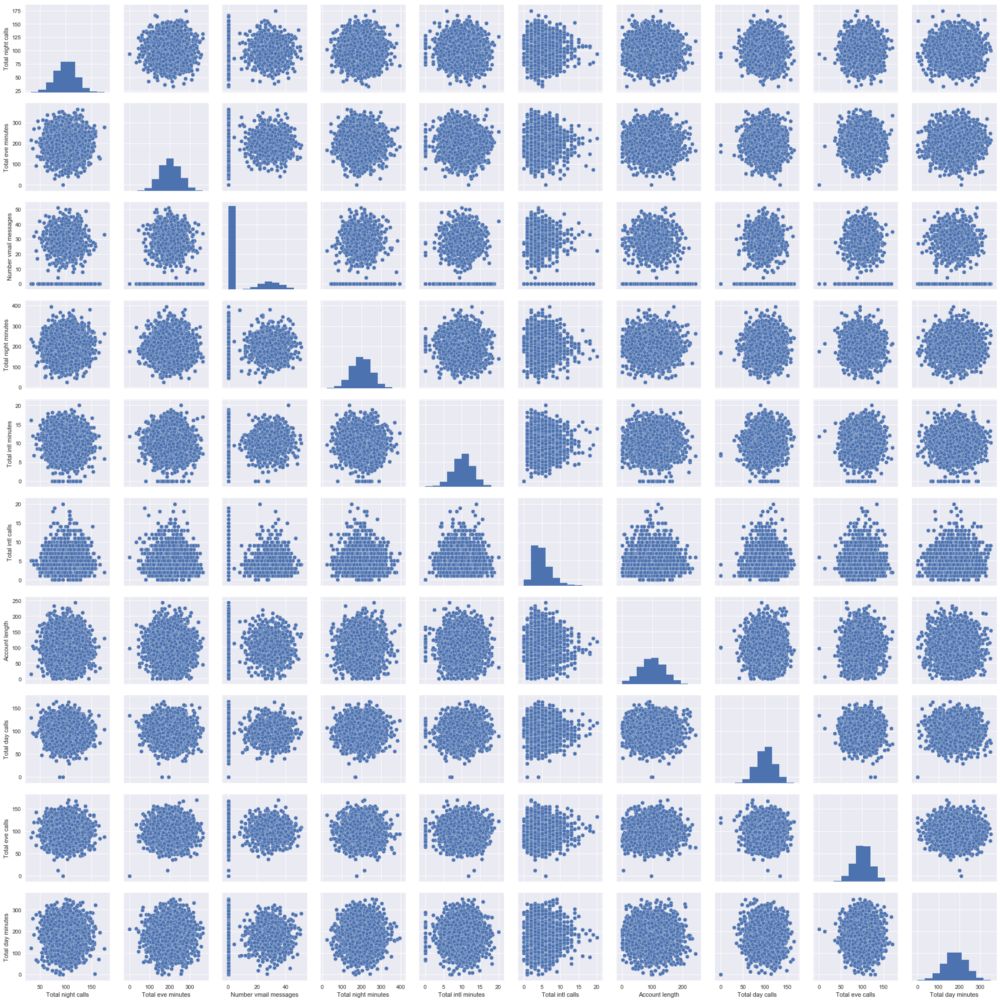
这个基本上是我们之前讨论过的核密度图的双变量版本。 散点图矩阵 在某些情形下,我们可能想要绘制如下所示的散点图矩阵(scatterplot matrix)。它的对角线包含变量的分布,而每对变量的散点图填充了矩阵的其余部分。 # 使用SVG格式可能导致pairplot变得非常慢 %config InlineBackend.figure_format = 'png' sns.pairplot(df[numerical]);
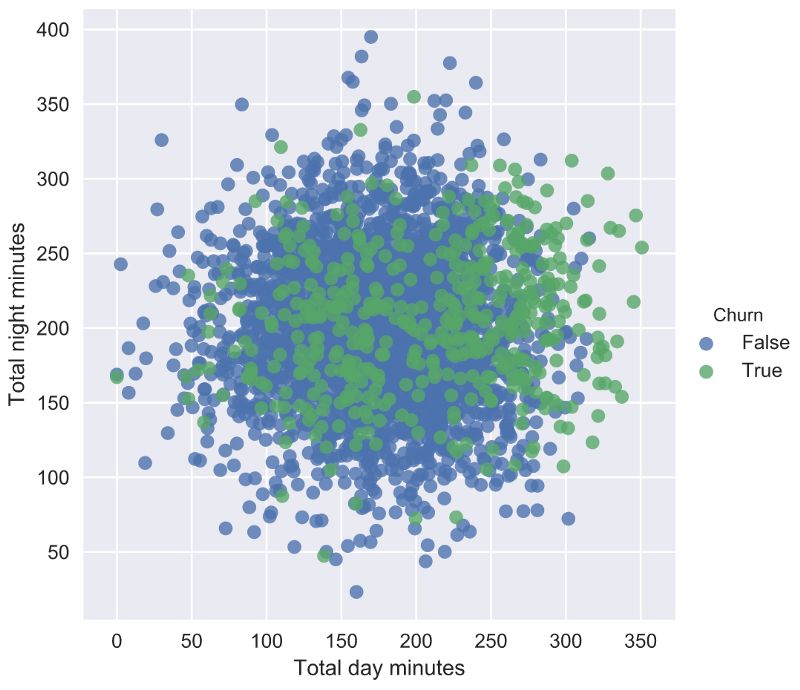
有时候,这样的可视化可能帮我们从数据中得出一些结论。 3.2 数量——类别 在这一小节中,让我们的图形更有趣一点。我们将尝试从数值和类别特征的相互作用中得到离网预测的新洞见。 更具体地,让我看看输入变量和目标变量离网的关系。 先前我们了解了散点图。散点图中的数据点可以通过色彩或尺寸进行编码,以便在同一张图像中包括第三个类别变量的值。我们可以通过之前的scatter()函数达成这一点,不过,这次让我们换换花样,用lmplot()函数的hue参数来指定感兴趣的类别特征: sns.lmplot('Total day minutes', 'Total night minutes', data=df, hue='Churn', fit_reg=False);
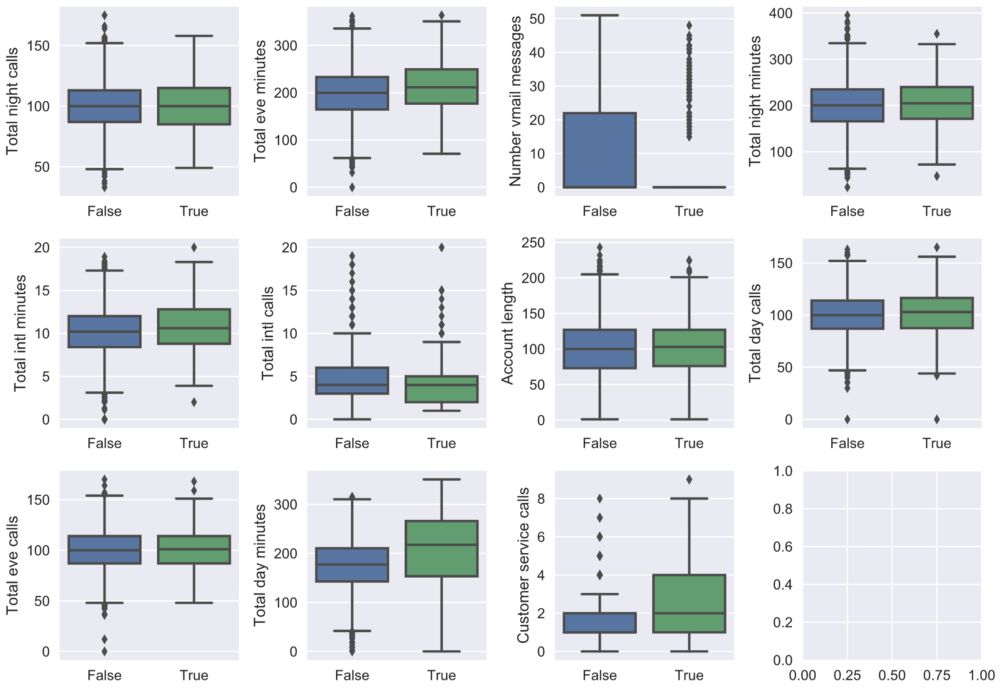
看起来占少数的不忠实客户偏向右上角;也就是倾向于在白天和夜间打更多电话的客户。但这不是非常明显,我们也不会基于这一图形下任何确定的结论。 现在,让我们创建箱形图,以可视化两个互斥分组中的数值变量分布的统计数据:忠实客户(Churn=False)和离网客户(Churn=True)。 # 有时我们可以将有序变量作为数值变量分析 numerical.append('Customer service calls') fig, axes = plt.subplots(nrows=3, ncols=4, figsize=(10, 7)) for idx, feat in enumerate(numerical): ax = axes[int(idx / 4), idx % 4] sns.boxplot(x='Churn', y=feat, data=df, ax=ax) ax.set_xlabel('') ax.set_ylabel(feat) fig.tight_layout();
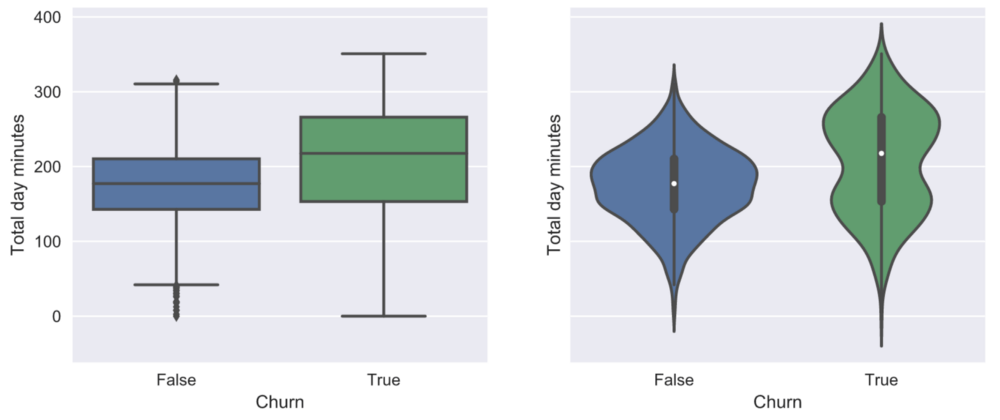
从这一图表中,我们可以看到,两组之间分歧最大的分布是这三个变量:Total day minutes(日通话分钟数)、Customer service calls(客服呼叫数)、Number vmail messages(语音邮件数)。在后续的课程中,我们将学习如何使用随机森林(Random Forest)或梯度提升(Gradient Boosting)来判定特征对分类的重要性;那时我们将看到,前两个特征对于离网预测而言确实非常重要。 让我们分别看下忠实客户和不忠实客户的日通话分钟数。我们将创建箱形图和提琴形图。 _, axes = plt.subplots(1, 2, sharey=True, figsize=(10, 4)) sns.boxplot(x='Churn', y='Total day minutes', data=df, ax=axes[0]); sns.violinplot(x='Churn', y='Total day minutes', data=df, ax=axes[1]);
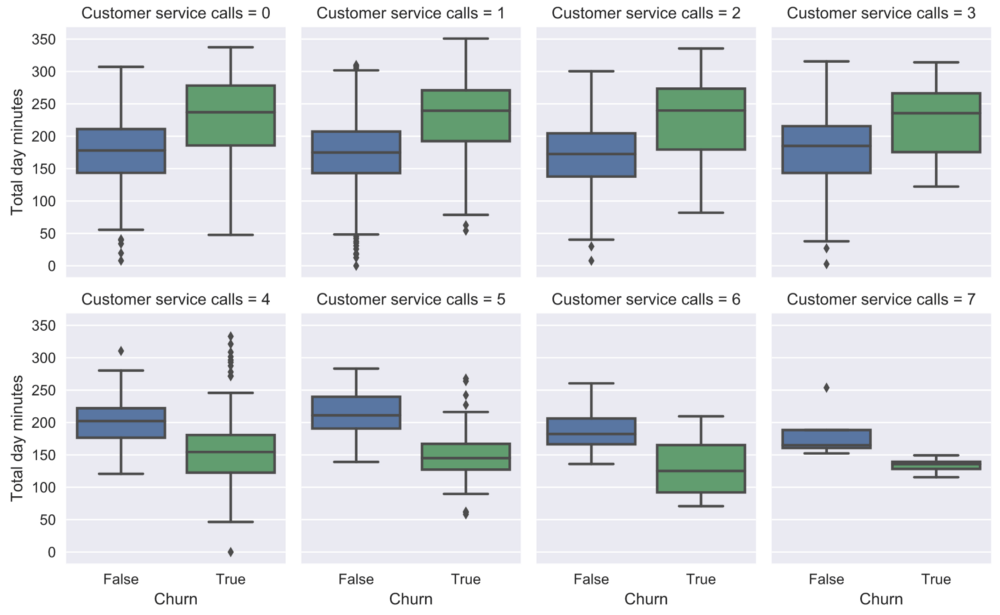
在这一情形下,提琴形图并没有提供关于数据的额外信息,因为箱形图已经告诉了我们一切:不忠实客户倾向于打更多的电话。 一个有趣的观察:平均而言,终止他们的协议的客户是通讯服务更活跃的用户。也许他们对话费不满意,所以预防离网的一个可能措施是降低通话费率。公司需要进行额外的经济分析,以查明这样的措施是否有利。 当我们想要一次分析两个类别维度下的数量变量时,可以用seaborn库的factorplot()函数。例如,在同一图形中可视化Total day minutes(日通话分钟数)和两个类别变量的相互作用: sns.factorplot(x='Churn', y='Total day minutes', col='Customer service calls', data=df[df['Customer service calls'] kind="box", col_wrap=4, size=3, aspect=.8);
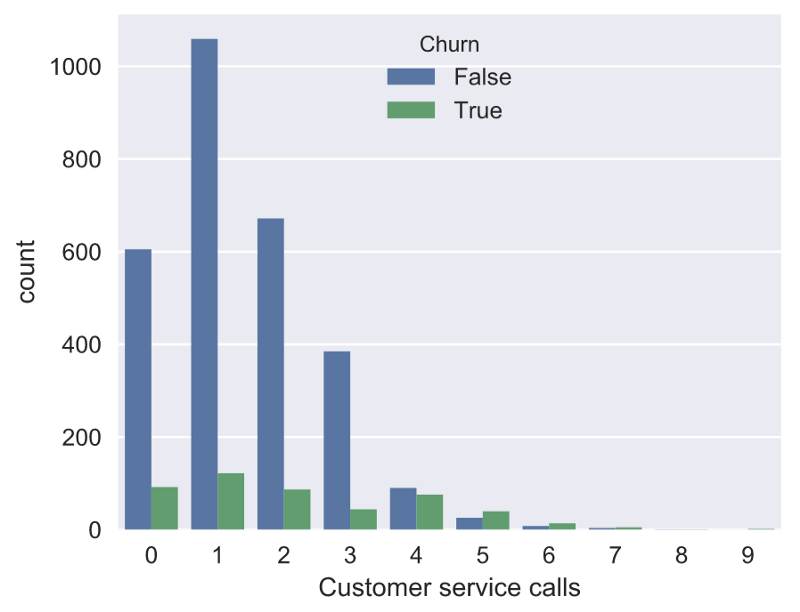
从上图我们可以总结出,从4次呼叫开始,Total day minutes(日通话分钟数)可能不再是客户离网的主要因素。也许,除了我们之前猜测的话费,有些客户因为其他问题对服务不满意,或许这导致了日通话分钟数较少。 3.3 类别——类别 正如我们之前提到的,变量Customer service calls(客服呼叫数)的唯一值极少,因此,既可以看成数值变量,也可以看成有序类别变量。我们已经通过计数图(countc plot)查看过它的分布了。现在我们感兴趣的是这一有序特征和目标变量Churn(离网)之间的关系。 让我们再一次使用计数图看下客服呼叫数的分布。这次,我们同时传入hue=Churn参数,以便在图形中加入类别维度: sns.countplot(x='Customer service calls', hue='Churn', data=df);
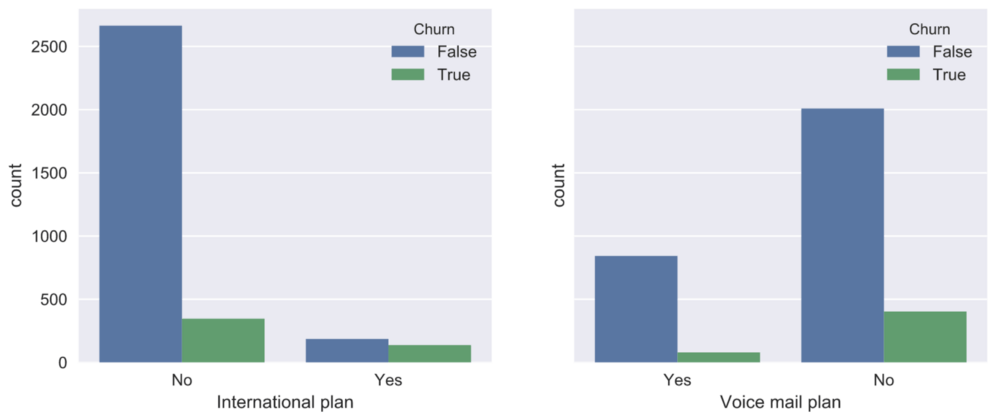
观察:呼叫客服达到4次以上后,离网率显著增加了。 现在让我们看下Churn(离网)和二元特征International plan(国际套餐)、Voice mail plan(语音邮件套餐)的关系。 _, axes = plt.subplots(1, 2, sharey=True, figsize=(10, 4)) sns.countplot(x='International plan', hue='Churn', data=df, ax=axes[0]); sns.countplot(x='Voice mail plan', hue='Churn', data=df, ax=axes[1]);
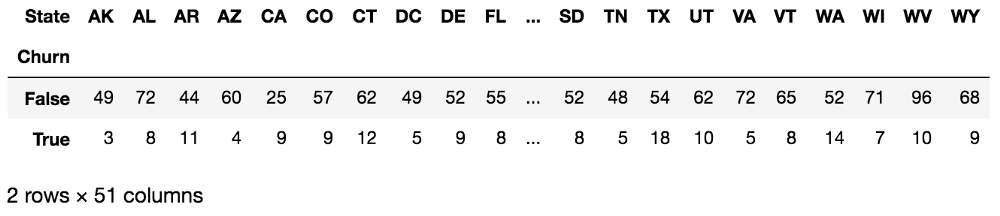
观察:开通国际套餐后,离网率会高很多;使用国际套餐是一个强烈的特征。我们在语音邮件套餐上没有观察到相同的效应。 列联表 除了使用图形进行类别分析之外,还可以使用统计学的传统工具:列联表(contingency table),又称为交叉制表(cross tabulation),使用表格形式表示多个类别变量的频率分布。特别地,它让我们可以通过查看一列或一行来得知某个变量在另一变量的作用下的分布。 让我们通过交叉制表看看Churn(离网)和类别变量State(州)的关系: pd.crosstab(df['State'], df['Churn']).T
State(州)的不同值很多:51. 我们看到每个周只有少量数据点——每个州只有3到17个客户抛弃了运营商。让我们暂时忽略这一点,计算每个州的离网率,由高到低排列: df.groupby(['State'])['Churn']. agg([np.mean]). sort_values(by='mean', ascending=False).T
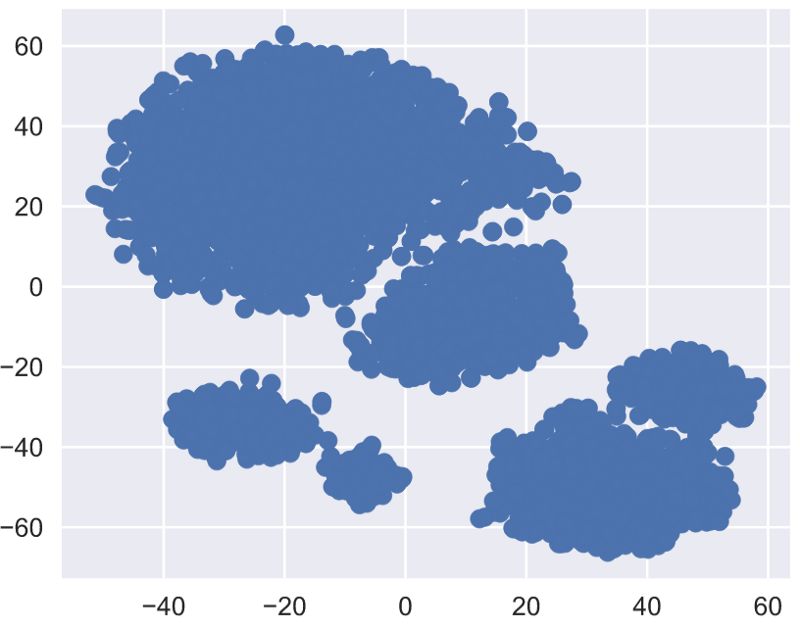
乍看起来,新泽西和加利福尼亚的离网率超过了25%,夏威夷和阿拉斯加的离网率则不到6%. 然而,这些结论是基于极少的样本得出的,我们的观察可能仅仅是这一特定数据集的性质。我们可以通过Matthews和Cramer相关性假说确认这一点,不过这个超出了这篇文章的范围。 4. 全数据集 4.1 幼稚方法 上面我们查看了数据集的不同刻面(facet),猜测感兴趣的特征,每次选择其中的一小部分进行可视化。我们一次仅仅处理两到三个变量,能比较容易地观察到数据的结构和关系。但是,如果我们想一下子显示所有特征呢?如何确保最终的可视化仍然是可解释的? 我们可以为整个数据集使用hist()或者pairplot()方法,同时查看所有的特征。不过,当特征数目足够多的时候,这样的可视化分析很快就变得缓慢和低效。另外,我们其实仍然可以成对地分析变量,而不用一下子分析所有变量。 4.2 降维 大多数现实世界的数据集有很多特征,有时有上万个特征。每一个特征都可以被看成数据点空间的一维。因此,我们经常需要处理高维数据集,可视化整个高维数据集相当难。 为了从整体上查看一个数据集,我们需要在不损失很多数据信息的前提下,降低用于可视化的维度。这一任务称为降维(dimensionality reduction)。降维是一个无监督学习(unsupervised learning)问题,因为我们需要在不借助任何监督输入的前提下,从数据自身得到新的低维特征。 主成分分析(Principal Component Analysis, PCA)是一个著名的降维方法,我们会在之后的课程中讨论它。主成分分析有一个限制,它是线性(linear)算法,因而对数据有某些特定的限制。 有许多非线性方法,统称流形学习(Manifold Learning)。最著名的流形学习方法之一是t-SNE。 4.3 t-SNE 让我们为离网数据创建一个t-SNE表示。 这一方法的名字看起来很复杂,有些吓人:t分布随机近邻嵌入(t-distributed Stohastic Neighbor Embedding)。它的数学也很令人印象深刻(我们不会在这里深究数学,勇敢的读者可以阅读Laurens van der Maaten和Geoffrey Hinton在JMLR上发表的原论文)。它的基本思路很简单:为高维特征空间在二维平面(或三维超平面,不过基本上总是使用二维空间)上寻找一个投影,使得在原本的n维空间中相距很远的数据点在屏幕上同样相距较远。而原本相近的点在平面上仍然相近。 本质上,近邻嵌入寻找保留了样本的邻居关系的新的维度较低的数据表示。 现在让我们做些练习。首先,加载类: from sklearn.manifold import TSNE from sklearn.preprocessing importStandardScaler 我们去除State(州)和离网(Churn)变量,然后用pandas.Series.map()方法将二元特征的“Yes”/“No”转换成数值: X = df.drop(['Churn', 'State'], axis=1) X['International plan'] = X['International plan']. map({'Yes': 1, 'No': 0}) X['Voice mail plan'] = X['Voice mail plan']. map({'Yes': 1, 'No': 0}) 我们同样需要归一化数据。我们从每个变量中减去均值,然后除以标准差。这些都可以使用StandardScaler来完成。 scaler = StandardScaler() X_scaled = scaler.fit_transform(X) 现在可以构建t-SNE表示了: tsne = TSNE(random_state=17) tsne_repr = tsne.fit_transform(X_scaled) 然后可视化它的图形: plt.scatter(tsne_repr[:, 0], tsne_repr[:, 1]);
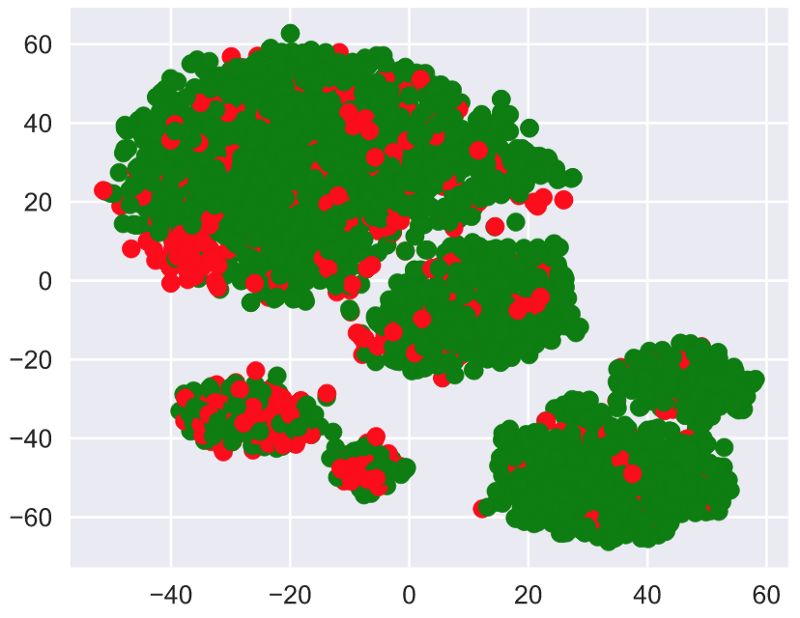
让我们根据离网情况给t-SNE表示加上色彩(绿色表示忠实用户,红色表示不忠实用户)。 plt.scatter(tsne_repr[:, 0], tsne_repr[:, 1], c=df['Churn'].map({False: 'green', True: 'red'}));
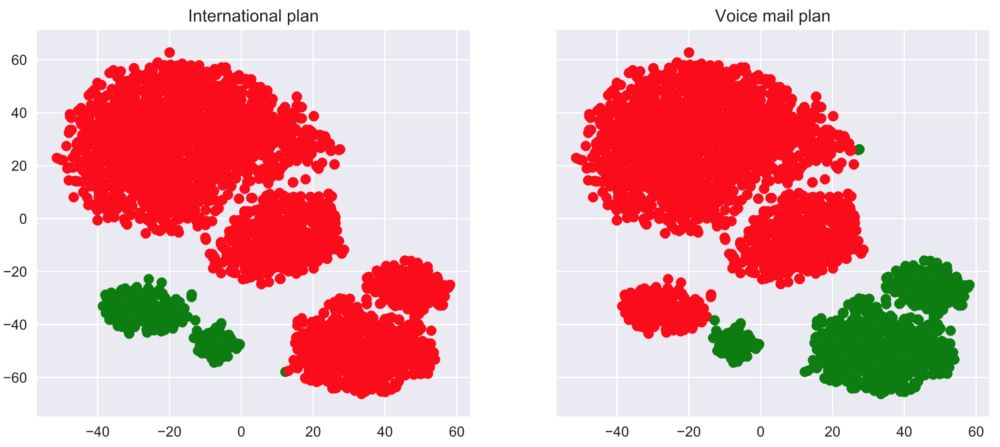
我们可以看到,离网的客户集中在低维特征空间的一小部分区域。 为了更好地理解这一图像,我们可以使用剩下的两个二元特征给图像着色:International plan(国际套餐)和Voice mail plan(语音邮件套餐)。绿色代表相应的二元特征是正值。 _, axes = plt.subplots(1, 2, sharey=True, figsize=(12, 5)) for i, name in enumerate(['International plan', 'Voice mail plan']): axes[i].scatter(tsne_repr[:, 0], tsne_repr[:, 1], c=df[name].map({'Yes': 'green', 'No': 'red'})) axes[i].set_title(name)
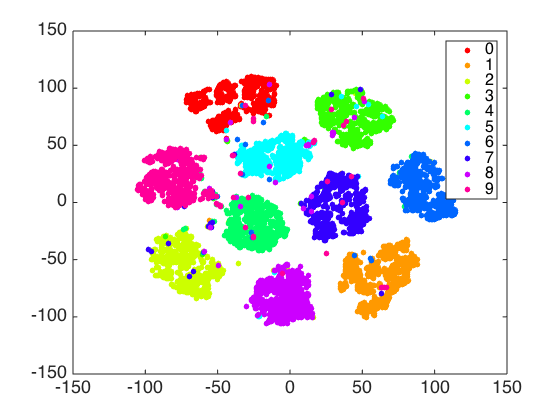
现在很清楚了,许多退订的不满意客户集中在西南聚类(表示开通了国际套餐但没有开通语音邮件套餐)。 最后,让我们了解下t-SNE的缺陷: 高计算复杂度。scikit-learn的实现在真实任务中往往不太管用。如果你有大量样本,你应该转而使用Multicore-TSNE(多核)。 随机数种子的不同会导致图形大不相同,这给解释带来了困难。请参考文末相关资源给出的t-SNE教程。通常而言,你不应该基于这些图像做出任何深远的结论,因为它可能和单纯的猜测差不多。当然,t-SNE图像中的某些发现可能会启发一个想法,这个想法可以通过更全面深入的研究得到确认,但这并不经常发生。 偶尔,t-SNE可以让你从数据中得到非常好的直觉。下面的论文展示了一个这样的例子:Visualizing MNIST(可视化MNIST)。
有时t-SNE真的能够帮助你更好地理解数据,有时t-SNE能够帮助你画出圣诞树玩具 :-) 用t-SNE) 
原文标题:机器学习开放课程(二):使用Python可视化数据 文章出处:【微信号:jqr_AI,微信公众号:论智】欢迎添加关注!文章转载请注明出处。 收藏 人收藏扫一扫,分享给好友 复制链接分享 评论发布评论请先 登录 相关推荐 工作场所中的协作:新一代协作机器人如何改善手动工作的性质 自动化技术可以让工作变得不那么危险、繁重和乏味,但需要小心实施,且需要经过再培训。本文将分享ADI公.... 发表于 03-21 11:28 • 0次 阅读 机器人程序中断与相应的恢复方式
机器人程序在运行过程中,可能会因为人为操作或报警的原因而发生程序中断。本文就机器人程序中断与相应的恢....
机器人程序中断与相应的恢复方式
机器人程序在运行过程中,可能会因为人为操作或报警的原因而发生程序中断。本文就机器人程序中断与相应的恢....
 高度柔性的人机协作搬运解决方案,助力仓储智能化升级
中舟智能i跟班系列i3机器人凭借强兼容性与高柔性,可以2天内快速部署到仓库和线边物流场景,通过加装不....
发表于 03-18 13:47 •
7次
阅读
移远通信SG500Q-CN开启商用 广和通智能模组SC126系列促智慧连接
2021年12月份已经通过CCC、NAL认证的SG500Q-CN如正式开启商用,这意味着在未来很....
高度柔性的人机协作搬运解决方案,助力仓储智能化升级
中舟智能i跟班系列i3机器人凭借强兼容性与高柔性,可以2天内快速部署到仓库和线边物流场景,通过加装不....
发表于 03-18 13:47 •
7次
阅读
移远通信SG500Q-CN开启商用 广和通智能模组SC126系列促智慧连接
2021年12月份已经通过CCC、NAL认证的SG500Q-CN如正式开启商用,这意味着在未来很....
 工业智能机器人的核心功能及应用范围
工业智能制造迈入4.0阶段后,智能化与数字化成为行业不断发展的关键词。据IDC 最新发布的数据,20....
发表于 03-16 10:04 •
21次
阅读
工业智能机器人的核心功能及应用范围
工业智能制造迈入4.0阶段后,智能化与数字化成为行业不断发展的关键词。据IDC 最新发布的数据,20....
发表于 03-16 10:04 •
21次
阅读
 融合的机器人接近传感,有技术落伍了吗?
接近传感器涉及的范围很广,不管是使用电磁场、光还是声波,都能检测物体的存在。这一类传感也是机器人应用.... 融合的机器人接近传感,有技术落伍了吗?
接近传感器涉及的范围很广,不管是使用电磁场、光还是声波,都能检测物体的存在。这一类传感也是机器人应用....
 TI芯科技赋能中国新基建之人工智能_欧司朗和捷普为车辆打造全景视野
伴随算力、数据、互联网的发展,人工智能正处于从量变到质变的节点,尤其边缘端呈现出爆发式的发展。Gar....
机器人多轴控制同步性挑战如何解决?
目前工业机器人的发展趋势一是协作,二是多轴。所谓机器人的多轴驱控,即机器人在运行时需要准确地把控每一....
TI芯科技赋能中国新基建之人工智能_欧司朗和捷普为车辆打造全景视野
伴随算力、数据、互联网的发展,人工智能正处于从量变到质变的节点,尤其边缘端呈现出爆发式的发展。Gar....
机器人多轴控制同步性挑战如何解决?
目前工业机器人的发展趋势一是协作,二是多轴。所谓机器人的多轴驱控,即机器人在运行时需要准确地把控每一....
 思岚科技通过移动算法评价 ST汽车级导航及航位推算模块简化设计
上海机器人产业技术研究院牵头制修订的《机器人移动能力算法测评要求》标准,已于2021年底进入报批阶段....
机器人芯片需求升级,国产化仍在路上!国产主控芯片如何布局?
机器人,一直是备受关注的热门话题。机器人伴随工业自动化革新的进程,已衍生出各种不同应用方向的细分品类....
思岚科技通过移动算法评价 ST汽车级导航及航位推算模块简化设计
上海机器人产业技术研究院牵头制修订的《机器人移动能力算法测评要求》标准,已于2021年底进入报批阶段....
机器人芯片需求升级,国产化仍在路上!国产主控芯片如何布局?
机器人,一直是备受关注的热门话题。机器人伴随工业自动化革新的进程,已衍生出各种不同应用方向的细分品类....
 机器视觉运动控制一体机应用例程丨印刷字符有无检测
应用背景 在印刷行业中,进行印刷时,时常因印刷工艺、设备、材料等因素的影响会导致印刷质量不达标,会出....
发表于 03-10 18:04 •
14次
阅读
机器视觉运动控制一体机应用例程丨印刷字符有无检测
应用背景 在印刷行业中,进行印刷时,时常因印刷工艺、设备、材料等因素的影响会导致印刷质量不达标,会出....
发表于 03-10 18:04 •
14次
阅读
 NVIDIA终止Arm收购 英特尔携手打造智能制造工厂
2022 年 2 月 7 日 – NVIDIA 和软银集团公司(以下简称“软银集团”)今日宣布终....
NVIDIA终止Arm收购 英特尔携手打造智能制造工厂
2022 年 2 月 7 日 – NVIDIA 和软银集团公司(以下简称“软银集团”)今日宣布终....
 国产单孔机器人首例乙状结肠癌根治术圆满成功,引领单孔新纪元
2022年3月8日,上海交通大学医学院附属瑞金医院赵任教授团队“驾驭”具有完整自主知识产权的术锐单孔....
国产单孔机器人首例乙状结肠癌根治术圆满成功,引领单孔新纪元
2022年3月8日,上海交通大学医学院附属瑞金医院赵任教授团队“驾驭”具有完整自主知识产权的术锐单孔....
 INDEMIND 3D语义地图构建技术在机器人上的应用
随着机器人的应用版图从工厂不断扩张到商场、超市等服务领域,面对的作业环境也越来越复杂,对于产品的安全....
INDEMIND 3D语义地图构建技术在机器人上的应用
随着机器人的应用版图从工厂不断扩张到商场、超市等服务领域,面对的作业环境也越来越复杂,对于产品的安全....
 “双碳”加速工业互联网产业发展
广州国际工业自动化技术及装备展在广州琶洲·广交会馆B区如期举办,本次展览亮点之一:由智博数字与法兰克....
“双碳”加速工业互联网产业发展
广州国际工业自动化技术及装备展在广州琶洲·广交会馆B区如期举办,本次展览亮点之一:由智博数字与法兰克....
 如何去实现一种步行机器人的设计呢
文末下载完整资料 摘 要 机器人是一门涉及计算机科学、机械、电子、...
发表于 03-02 06:23 •
180次
阅读
机器蜜蜂-一个巨大的微小发明
根据哈佛大学微型机器人实验室的研究,RoboBee 是一个模仿“蜜蜂”的小型扑翼机器人。这个微型机器人的体积只有回形针的一半...
发表于 02-25 11:39 •
1405次
阅读
如何去实现一种步行机器人的设计呢
文末下载完整资料 摘 要 机器人是一门涉及计算机科学、机械、电子、...
发表于 03-02 06:23 •
180次
阅读
机器蜜蜂-一个巨大的微小发明
根据哈佛大学微型机器人实验室的研究,RoboBee 是一个模仿“蜜蜂”的小型扑翼机器人。这个微型机器人的体积只有回形针的一半...
发表于 02-25 11:39 •
1405次
阅读
 STM32F407ZGT6的相关资料推荐
背景故事发生在一个月黑风高的夜晚,男主正在焦急的用外部中断模式读取电机编码器输出的脉冲个数并进行处理,企图用这种方式求得...
发表于 02-14 07:42 •
128次
阅读
ROS中的TF坐标变换如何实现
TF功能包能干什么?
TF坐标变换如何实现?
发表于 02-14 06:29 •
193次
阅读
求一种机械臂建模D-H方法
D-H法机械臂建模D-H建模方法是由D和H两个人提出的,是用于机器人运动学上的建模方法,该方法是在每个连杆上建立一个坐标系...
发表于 01-20 08:12 •
232次
阅读
如何去实现一种气动爬行机器人设计
气动爬行机器人设计简介项目规则简介最近在学校做一个气动的爬行机器人,算是一个二级项目,虽然名义上有分组,但是基本上是我自...
发表于 01-13 08:09 •
320次
阅读
怎样去设计一个基于STM32的手写机器人
starger District 46实验室 3月25日看厌了圆形的钟表,数字显示又太生硬,相信很多人和我一样,想换一个与众不同的方式看时间,...
发表于 01-13 07:11 •
304次
阅读
如何直接按power进入菜单呢
如果是原生就是 按住电源 +音量键现在修改成只要按下电源键可以进入L版本进入recovery mode 会出现小机器人界面需同时按volume ...
发表于 01-03 07:35 •
973次
阅读
ANYmal四足机器人的相关资料推荐
去年 1 月份,瑞士公司 ANYbotics 放出来一款灵活的四足机器人——ANYmal,它可以对抗各种恶劣的现实环境,适用于在危险的...
发表于 12-31 06:28 •
468次
阅读
STM32F407ZGT6的相关资料推荐
背景故事发生在一个月黑风高的夜晚,男主正在焦急的用外部中断模式读取电机编码器输出的脉冲个数并进行处理,企图用这种方式求得...
发表于 02-14 07:42 •
128次
阅读
ROS中的TF坐标变换如何实现
TF功能包能干什么?
TF坐标变换如何实现?
发表于 02-14 06:29 •
193次
阅读
求一种机械臂建模D-H方法
D-H法机械臂建模D-H建模方法是由D和H两个人提出的,是用于机器人运动学上的建模方法,该方法是在每个连杆上建立一个坐标系...
发表于 01-20 08:12 •
232次
阅读
如何去实现一种气动爬行机器人设计
气动爬行机器人设计简介项目规则简介最近在学校做一个气动的爬行机器人,算是一个二级项目,虽然名义上有分组,但是基本上是我自...
发表于 01-13 08:09 •
320次
阅读
怎样去设计一个基于STM32的手写机器人
starger District 46实验室 3月25日看厌了圆形的钟表,数字显示又太生硬,相信很多人和我一样,想换一个与众不同的方式看时间,...
发表于 01-13 07:11 •
304次
阅读
如何直接按power进入菜单呢
如果是原生就是 按住电源 +音量键现在修改成只要按下电源键可以进入L版本进入recovery mode 会出现小机器人界面需同时按volume ...
发表于 01-03 07:35 •
973次
阅读
ANYmal四足机器人的相关资料推荐
去年 1 月份,瑞士公司 ANYbotics 放出来一款灵活的四足机器人——ANYmal,它可以对抗各种恶劣的现实环境,适用于在危险的...
发表于 12-31 06:28 •
468次
阅读
|


【本文地址】
今日新闻 |
推荐新闻 |