库卡机器人运动指令介绍 |
您所在的位置:网站首页 › ptp指令共有三个配置的指令 › 库卡机器人运动指令介绍 |
库卡机器人运动指令介绍
|
1、机器人的运动类型
2、PTP运动 (1)PTP运动简要介绍 PTP运动示意图
同步运动PTP 在一个PTP运动中,参与运动的轴中运动距离组长的被称之为主轴,在运行指令中它的速度无法被精确定义。
PTP高速运动示意图 在以下这个V-T图中,显示高速模式下机器人的默认运动设定,在一个运动中的机器人的扭矩控制始终会被优化,并且它的速度始终防止扭矩超差。
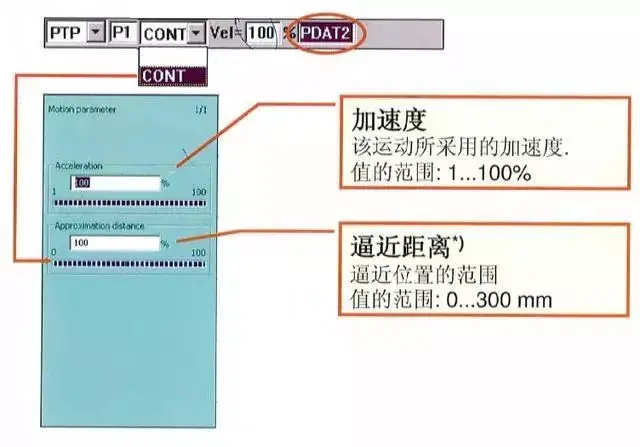
(2)编辑PTP运动指令 编辑运动指令一
编辑运动指令二
编辑运动指令三
只有当选择逼近运动(CONT)后,该参数“Approximation distance”才会显示。 (3)BCOrun 第一部分 为了确保机器人处于程序设定的目标路径上,需要执行BCO功能,这个功能会在一个低速状态下执行,机器人会移动到相应块指针所对应的运动指令点。
第二部分 只有当选择逼近运动(CONT)后,该参数“Approximation distance”才会显示。 以下情况会执行BCO功能: a、程序复位后通过BCO功能回到HOME点。 b、移动机器人到块指针选择运动点。 c、外部自动模式钱选择“CELL”程序。 d、选择新程序。 e、指令修改后。 f、编程模式手动移动了机器人。 注意: 由于HOME位置是系统设定的初始位置,通常会推荐用户将它作为程序的第一以及最后一个运动指令, 第三部分 BCO功能总是直接从当前点向目标点运动,因此非常重要的一点是需要确保 此路径上没有障碍物,以防损坏工件、工具或者机器人。 机器人连续运行方式: 1、选择程序后,一直按下启动键。 2、机器人自动低速运行。 3、机器人到达目标后,再按下启动键程序继续运行 3、LIN运动 (1)LIN运动简介 TCP沿着一条直线运动
速度图像
(2)编辑LIN指令 编辑指令一
编辑指令二
编辑指令三
只有当选择逼近运动(CONT)后,该参数“Approximation distance”才会显示。 编辑指令四
在这个路径运动过程中,工具的方向会从起始点到结束点连续变化,这个动作的完成取决于工具的姿态。 编辑指令五
在这个路径运动过程中,工具的方向会从起始点到结束点连续变化,这种方式通过腕部轴的变化把执行运动拆分成若干个PTP运动来执行,这种方式可以避免死角情况发生。 编辑指令六
在这个连续动作中,工具方向始终保持不变,保留起始点的工具姿态忽略结束点的工具姿态。 4、CIRC运动 (1)CIRC运动简介 TCP沿着圆弧向结束点运动
这里TCP或者是工件的参考点,会沿着圆弧向结束点运动,这条路径由起始点,中间点,结束点确定的,运动结束点会是下一个运动的起始点;当一个点作为圆弧中间点的时候,它的工具姿态就会被忽略
CIRC运动速度图形
(2)编辑CIRC运动指令 CIRC运动指令一
CIRC运动指令二
CIRC运动指令三
只有当选择逼近运动(CONT)后,该参数“Approximation distance”才会 显示。 CIRC运动指令四
在这个路径运动过程中,工具的方向会熊起始点到结束点连续变化,这个动作的完成取决于工具的姿态。 CIRC运动指令五
在这个路径运动过程中,工具的方向会从起始点到结束点连续变化,这 种方式通过腕部轴的变化把直线运动拆分成若干个PTP运动来执行,这种方式可以避免死角情况的发生。 CIRC运动指令六
在这个连续运动中,工具方向始终保持不变,保留起始点的工具姿态,忽略结束点工具姿态。 360°的整圆
一个完整的圆弧必须用两个语句来完成。 5、逼近运动 (1)逼近运动简介 在逼近的过程中,机器人不会精确的到达程序的每一个点,因此没有停顿,这样可以减少损耗和缩短生产节拍。
逼近运动所节省的节拍时间
(2)PTP逼近运动 PTP逼近运动示意图,P2是逼近点。
(3)LIN逼近运动 P2是逼近点。
(4)CIRC逼近运动 P3是逼近点
转载声明:此文章素材来源于「机器人网」,侵权删。 |






























【本文地址】
今日新闻 |
推荐新闻 |