MATLAB |
您所在的位置:网站首页 › pla算法迭代次数有界 › MATLAB |
MATLAB
|
fsolve
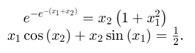
解非线性方程组 非线性系统解算器 解决指定的问题 F(x)= 0对于x, F(x)是一个返回向量值的函数。 x是一个向量或者一个矩阵;看矩阵参数。 语法: x = fsolve(fun,x0) x = fsolve(fun,x0,options) x = fsolve(problem) [x,fval] = fsolve(___) [x,fval,exitflag,output] = fsolve(___) [x,fval,exitflag,output,jacobian] = fsolve(___) 描述: 1. x = fsolve(fun,x0) 从x0开始,试着解这些方程fun(x) = 0,一个0的数组。实例:二维非线性系统的解 这个例子展示了如何在两个变量中求解两个非线性方程。方程是 将此代码保存为一个名为root2d的文件在你的MATLAB搜索路径下。 求从点[0,0]开始的方程组。 fun = @root2d; x0 = [0,0]; x = fsolve(fun,x0)方程解决。 fsolve完成是因为函数值的向量在函数公差的默认值测量下接近于零,而这个问题在梯度测量下呈现出规律性。 x = 0.3532 0.6061补充:MATLAB软件计算结果 方程解决。函数值的平方和r = 5.939402e-14小于sqrt(options.FunctionTolerance) = 1.000000e-03。r的梯度的相对范数r,2.023188e-07,小于选项OptimalityTolerance = 1.000000e-06。 优化指标选项相对范数(grad r) = 2.02e-07OptimalityTolerance = 1e-06 (default)r = 5.94e-14sqrt(FunctionTolerance) = 1.0e-03 (default) 2. x = fsolve(fun,x0,options)用选项中指定的优化选项解决方程。使用optimoptions来设置这些选项。实例:具有非默认选项的解决方案 检查非线性系统的求解过程。 设置选项为无显示和一个显示一阶最优性的绘图函数,当算法迭代时,该函数应该收敛到0。 options = optimoptions('fsolve','Display','none','PlotFcn',@optimplotfirstorderopt);非线性系统中的方程是 将此代码保存为MATLAB®路径上名为root2d.m的文件。 从点[0,0]开始求解非线性方程组,观察求解过程。 fun = @root2d; x0 = [0,0]; x = fsolve(fun,x0,options)结果 x = 0.3532 0.6061
实例:解决一个问题结构体 为fsolve创建问题结构体并解决问题。 使用非默认选项解决与解决方案相同的问题,但是使用问题结构体表示问题。 设置没有显示的问题选项和显示一阶最优性的绘图函数,当算法迭代时,它应该收敛到0。 problem.options = optimoptions('fsolve','Display','none','PlotFcn',@optimplotfirstorderopt);非线性系统中的方程是 将此代码保存为MATLAB®路径上名为root2d.m的文件。 在问题结构中创建其余字段。 problem.objective = @root2d; problem.x0 = [0,0]; problem.solver = 'fsolve';解决这个问题。 x = fsolve(problem) x = 0.3532 0.6061
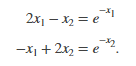
实例:非线性系统的解过程 此示例返回迭代显示,显示两个方程和两个未知数的系统的求解过程 在x0 =[-5 -5]中开始寻找解决方案。 首先,写一个计算F的文件,计算方程在x处的值。 function F = myfun(x) F = [2*x(1) - x(2) - exp(-x(1)); -x(1) + 2*x(2) - exp(-x(2))];在MATLAB®路径上将此函数文件另存为myfun.m. 设置初始点。设置options以返回迭代显示。 x0 = [-5;-5]; options = optimoptions('fsolve','Display','iter');调用fsolve。 [x,fval] = fsolve(@myfun,x0,options) Iteration 迭代Func- countf(x)Norm of stepFirst-order optimality 一阶最优性Trust-region radius信赖域半径0323535.62.29e+0041166001.7215.75e+0031291573.5111.47e+0031312427.22613881415119.7631107151833.5206130.816218.3520819.0517241.2139412.2618270.0163290.7595110.2062.59303.51575e-0060.1119270.002942.510331.64763e-0130.001691326.36e-0072.5方程解决。 fsolve完成是因为函数值的向量在函数公差的默认值测量下接近于零,而这个问题在梯度测量下呈现出规律性。 x = 0.5671 0.5671 fval = 1.0e-006 * -0.4059 -0.4059补充: 实例:检验矩阵方程解 找到一个满足的矩阵X 从点x=[1,1;1,1]开始。检查fsolve输出,查看解决方案的质量和过程。 创建一个匿名函数来计算矩阵方程。 fun = @(x)x*x*x - [1,2;3,4];设置关闭显示的选项。设初始点x0。 options = optimoptions('fsolve','Display','off'); x0 = ones(2);调用fsolve并获取有关解决过程的信息。 x = -0.1291 0.8602 1.2903 1.1612 fval = 1.0e-09 * -0.1618 0.0778 0.1160 -0.0474 exitflag = 1退出标志值1表示解决方案是可靠的。为了手工验证这一点,计算残差(fval的平方和),看看它离零有多近。 sum(sum(fval.*fval)) ans = 4.7957e-20这个小残差证实了x是一个解。 正如您在输出结构中看到的,fsolve执行了35个函数计算来找到解决方案。 output.funcCount ans = 35 [x,fval,exitflag,output,jacobian] = fsolve(___)返回在解x处的fun函数的雅可比矩阵。 输入参数fun — 非线性方程求解 函数句柄 | 函数名 要求解的非线性方程,指定为函数句柄或函数名。 fun是一个接受向量x并返回向量F的函数,向量F是在x处取值的非线性方程。对于F的所有分量,要求解的等式是F = 0.函数fun可以被指定为文件的函数句柄 x = fsolve(@myfun,x0)其中 myfun 是一个MATLAB函数,比如 function F = myfun(x) F = ... % 计算函数在x点的值fun 也可以是匿名函数的函数句柄。 x = fsolve(@(x)sin(x.*x),x0);如果x和F的用户定义值是矩阵,则使用线性索引(MATLAB)将它们转换为向量。 如果雅可比矩阵也可以计算并且雅可比矩阵选项是“on”,则由 options = optimoptions('fsolve','SpecifyObjectiveGradient','on')函数fun必须在第二个输出参数中返回雅可比值J,即x处的矩阵。 如果fun返回m个分量的向量(矩阵)并且x具有长度n,其中n是x0的长度,则雅可比J是m*n矩阵,其中J(i,j)是F( i)关于x(j)的偏导数。 (雅可比J是F渐变的转置) Example: fun = @(x)xxx-[1,2;3,4] Data Types: char | function_handle | string x0 — 起始点 实向量| 实数组 初始点,指定为实向量或实数组。fsolve使用元素的数量和x0的大小来确定fun接受的变量的数量和大小。 Example: x0 = [1,2,3,4] Data Types: double options — 优化选项 输出的优化选项 | 结构作为优化集返回 优化选项,指定为优化选项的输出或优化集返回等结构。 一些选项适用于所有算法,另一些选项与特定算法相关。有关详细信息,请参见优化选项参考。从Optimization Options Reference 查看详细信息. 优化选项显示中缺少一些选项。这些选项以斜体列出。有关详细信息,请参见View Options。 所有的算法算法Algorithm在“trust-region-dogleg”(默认)、“trust-region”和“levenberg-marquardt”之间进行选择。Algorithm选项指定要使用哪种算法作为首选项。这只是一个偏好,因为对于trust-region算法,非线性方程组不能是欠定义的;也就是说,方程的数量(由fun返回的F的元素数量)必须至少与x的长度一样多。同样,对于trust-region-dogleg算法,方程的数量必须与x的长度相同。当所选算法不可用时,fsolve使用Levenberg-Marquardt算法。有关选择算法的更多信息,请参阅Choosing the Algorithm。要使用optimset而不是optimoptions设置一些算法选项:Algorithm - 将算法设置为’trust-region-reflective’而不是’trust-region’。InitDamping - 通过将Algorithm 设置为单元数组(例如{‘levenberg-marquardt’,.005})来设置初始Levenberg-Marquardt参数λ。CheckGradients检查梯度比较用户提供的导数(目标或约束的梯度)和有限差分导数。选项为真或默认为假。对于optimset,名称是derivative ativecheck,值是“on”或“off”。参见Current and Legacy Option Name Tables.当前和遗留选项名称表。Diagnostics诊断显示要达到最低限度的或求解的函数的诊断信息。选项是“on”或默认为“off”。DiffMaxChange差异极大值变化有限差分梯度(一个正标量)变量的最大变化量。默认是Inf。DiffMinChange差异极小值变化有限差分梯度(一个正标量)变量的最小变化量。默认值是0。Display显示显示级别(参见迭代显示):'off’或’none’不显示输出。'iter’在每次迭代时显示输出,并给出默认的退出消息。'iter-detailed’在每次迭代时显示输出,并给出技术退出消息。‘final’(默认值)仅显示最终输出,并提供默认退出消息。'final-detailed’显示最终输出,并给出技术退出消息。FiniteDifferenceStepSize有限差分步长有限差分的标量或向量步长因子。当你将有限差分步长设置为向量v时,正向有限差分步长为:delta = v.*sign′(x).*max(abs(x),TypicalX); sign′(x) = sign(x) except sign′(0) = 1。中心有限差分为:delta = v.*max(abs(x),TypicalX);标量FiniteDifferenceStepSize 扩展为一个向量。默认是sqrt(eps)向前有限的差异,和eps ^(1/3)中央有限的差异。对于optimset,名称是FinDiffRelStep。参见Current and Legacy Option Name Tables.当前和遗留选项名称表。FiniteDifferenceType有限差分类型有限差分,用来估计梯度,要么是“forward”(默认),要么是“central”(居中)。“central”需要两倍的函数求值,但应该更准确。该算法在估计两种类型的有限差分时,都注意遵守边界。例如,为了避免在边界外求值,它可以取一个反向的差,而不是正向的差。对于optimset,名称是FinDiffType。参见Current and Legacy Option Name Tables当前和遗留选项名称表。FunctionTolerance函数公差函数值上的终止公差,为正标量。默认值是1e-6。见 Tolerances and Stopping Criteria.公差和停止标准。对于optimset,名称是TolFun。参见 Current and Legacy Option Name Tables.当前和遗留选项名称表。FunValCheck函数值检查检查目标函数值是否有效。'on’在目标函数返回complex、Inf或NaN值时显示错误。默认的“off”不会显示错误。MaxFunctionEvaluationsMax函数评价允许的函数计算的最大数目,一个正整数。默认值是100*numberOfVariables。参见Tolerances and Stopping Criteria公差和停止标准、Iterations and Function Counts.迭代和函数计数。对于optimset,名称是MaxFunEvals。参见当前和遗留选项名称表。MaxIterations最大迭代次数允许的最大迭代次数,一个正整数。默认值是400。参见Tolerances and Stopping Criteria公差和停止标准 、Iterations and Function Counts迭代和功能计数。对于optimset,它的名称是MaxIter。参见Current and Legacy Option Name Tables当前和遗留选项名称表。OptimalityTolerance最优公差一阶最优解的终止公差,一个正标量。默认值是1e-6。见First-Order Optimality Measure一阶最优测度。在内部,“levenberg-marquardt”算法使用最优公差(停止准则)为FunctionTolerance的1e-4倍,而不使用OptimalityTolerance。OutputFcn输出函数指定优化函数在每次迭代时调用的一个或多个用户定义函数。传递函数句柄或函数句柄的单元数组。默认值是none([])。查看 Output Function.函数输出。PlotFcn绘图函数绘制算法执行过程中的各种进度度量;从预定义的图中选择或编写您自己的图。传递一个内置的绘图函数名、函数句柄或包含内置绘图函数名或函数句柄的单元格数组。对于自定义绘图函数,传递函数句柄。默认为none ([]):“optimplotx”绘制当前点。'optimplotfunccount’绘制函数计数图。'optimplotfval’绘制函数值。'optimplotstepsize’绘制步骤大小。'optimplotfirstorderopt’绘制一阶最优度量。有关编写自定义绘图函数的信息,请参见Plot Functions.绘图函数。对于optimset,名称是PlotFcns。参见 Current and Legacy Option Name Tables.当前和遗留选项名称表。SpecifyObjectiveGradient指定目标梯度如果为真,fsolve使用用户定义的雅可比矩阵(在fun中定义的)或雅可比矩阵信息(在使用雅可比矩阵multiplyfcn时)作为目标函数。如果为假(默认),fsolve使用有限差分近似雅可比矩阵。对于optimset,其名称为雅可比矩阵,值为“on”或“off”。参见Current and Legacy Option Name Tables.当前和遗留选项名称表。StepTolerance对x的终止公差,一个正标量。默认值是1e-6。见公差和停止标准。对于optimset,名称是TolX。参见Current and Legacy Option Name Tables.当前和遗留选项名称表。TypicalX典型的x值。TypicalX中的元素数量通常等于起点x0中的元素数量。默认值是1 (数量的变量,1)。fsolve使用TypicalX缩放有限差分进行梯度估计。trust-region-dogleg算法通常使用TypicalX作为缩放矩阵的对角线项。UseParallel为真时,fsolve并行估计梯度。通过设置为默认值false禁用。参见Parallel Computing.并行计算。 Levenberg-Marquardt AlgorithmInitDampingLevenberg-Marquardt参数的初值,一个正标量。默认是1e-2。详见Levenberg-Marquardt方法。ScaleProblem规模问题'jacobian’有时可以改进尺度较差问题的收敛性。默认值是“none”。Example: options = optimoptions(‘fsolve’,‘FiniteDifferenceType’,‘central’) 补充: Choosing the Algorithm fsolve Algorithmsfsolve 有三种算法: ‘trust-region-dogleg’ (默认) ‘trust-region’ ‘levenberg-marquardt’ 使用optimoptions在命令行设置算法选项。 建议 首先使用“trust-region-dogleg”算法。 如果fsolve失败,请查看该解决程序When the Solver Fail或When the Solver Might Have Succeeded。 如果您有一个雅可比矩阵乘法函数,或者希望优化内部算法(请参阅fsolve options中的Trust-Region Algorithm),请尝试“Trust-Region”再次求解方程。 尝试计时所有的算法,包括“levenberg-marquardt”,以找到最适合您的问题的算法。 建议背后的原因 “trust-region-dogleg”是唯一一种专门用于求解非线性方程的算法。其他的则试图最小化函数的平方和。 'trust-region’算法对稀疏问题是有效的。它可以使用特殊的技术,如雅可比矩阵乘函数的大规模问题。 有关算法的描述,请参见Equation Solving Algorithms。 problem — Problem structure structure 问题结构,指定为具有以下字段的结构: Field NameEntryobjective目标函数x0x的起始点solver‘fsolve’options使用optimoptions创建的选项获得问题结构的最简单方法是从Optimization app优化应用程序导出问题。 Data Types: struct 输出参数x -解 实向量|实数数组 解,作为实向量或实数组返回。x的大小等于x0的大小。通常,当exitflag为正数时,x是问题的本地解决方案。有关解决方案质量的信息,请参见When the Solver Succeeds.解决程序何时成功。 fval -目标函数在解处的值 真正的向量 目标函数在解处的值,作为实向量返回。一般来说,fval = fun(x)。 exitflag -原因fsolve停止 整数 原因fsolve停止,返回一个整数。 1方程解决。一阶最优性很小。2方程解决。改变x小于指定的公差。3方程解决。残余变化小于规定公差。4方程解决。搜索方向的大小小于指定的公差。0超出迭代次数options.MaxIterations或者超出函数计算的次数options.MaxFunctionEvaluations.-1输出函数或绘图函数停止算法。-2方程没有解决。退出消息可以包含更多信息。-3方程没有解决。信任区域半径太小(trust-region-dogleg算法)。output-关于优化过程的信息 结构 关于优化过程的信息,以字段结构形式返回: iterations迭代次数funcCount函数估算次数algorithm优化算法cgiterationsPCG迭代总次数(仅’trust-region’算法)stepsizex的最终位移(不在“trust-region-dogleg”中)firstorderopt一阶最优性的度量message退出消息jacobian-解的雅可比矩阵 真正的矩阵 解的雅可比矩阵,作为实矩阵返回。jacobian(i,j) 是fun(i) 关于x(j)在解x处的偏导数。 局限性要解的函数必须是连续的。 成功时,fsolve只给出一个根。 默认的trust-region dogleg方法只能在方程组为正方形时使用,即,方程的数量等于未知数的数量。对于Levenberg-Marquardt方法,方程组不需要是平方的。 trust-region算法的共轭梯度预处理部分的预处理计算在计算预处理前形成JTJ(其中J为雅可比矩阵);因此,一排带有许多非零的J,会导致JTJ产品的密度接近于零,这可能会导致解决大型问题的过程成本高昂。 算法Levenberg-Marquardt和trust-region方法是基于非线性最小二乘算法也用于lsqnonlin中。如果系统可能没有零,请使用其中一种方法。该算法仍然返回一个残差较小的点。但是,如果系统的雅可比矩阵是奇异的,那么算法可能收敛到一个不是方程组解的点(参见局限性)。 fsolve在默认情况下选择trust-region dogleg算法。该算法是[8]中描述的Powell dogleg方法的变体。它本质上类似于[7]中实现的算法。见 Trust-Region Dogleg Method。 trust-region算法是一种子空间信赖域方法,基于[1]和[2]中描述的内反射牛顿法。每一次迭代都涉及到使用预先条件共轭梯度法(PCG)求解大型线性系统的近似解。参见 Trust-Region fsolve Algorithm。 Levenberg-Marquardt方法在文献[4]、[5]和[6]中有描述。查看Levenberg-Marquardt Method。 |
 把方程转换成F(x)= 0形式。
把方程转换成F(x)= 0形式。  写一个函数,计算这两个方程的左边。
写一个函数,计算这两个方程的左边。
 把方程转换成F(x)= 0形式。
把方程转换成F(x)= 0形式。  编写一个函数来计算这两个方程的左边。
编写一个函数来计算这两个方程的左边。
 把方程转换成F(x)= 0形式。
把方程转换成F(x)= 0形式。 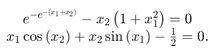 编写一个函数来计算这两个方程的左边。
编写一个函数来计算这两个方程的左边。
 以F(x)= 0的形式重写方程式:
以F(x)= 0的形式重写方程式: 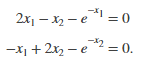
 方程解决。函数值的平方和r = 3.295252e-13,小于 √options.FunctionTolerance = 1.000000 e 03。r的梯度的相对范数,6.361186 -07,小于options。OptimalityTolerance = 1.000000 e-06。 优化指标的选择 相对范数(grad r) = 6.36e-07 OptimalityTolerance= 1e-06(默认) r = 3.30 e-13 √FunctionTolerance = 1.0 e-03(默认)
方程解决。函数值的平方和r = 3.295252e-13,小于 √options.FunctionTolerance = 1.000000 e 03。r的梯度的相对范数,6.361186 -07,小于options。OptimalityTolerance = 1.000000 e-06。 优化指标的选择 相对范数(grad r) = 6.36e-07 OptimalityTolerance= 1e-06(默认) r = 3.30 e-13 √FunctionTolerance = 1.0 e-03(默认)
【本文地址】