控制工程实践(7) |
您所在的位置:网站首页 › pid控制的优点有哪些 › 控制工程实践(7) |
控制工程实践(7)
|
PID控制器是一般应用中最常见的控制器。诸如控制元件温度、液体流量、无人机的飞行姿态和速度等,都是用PID控制来实现。PID是一种线性组合结构,将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,从而对被控对象进行控制。
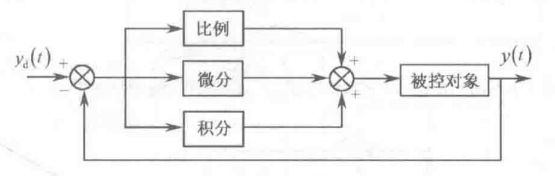 PID闭环控制方框图
PID闭环控制方框图
四种控制器,分别是四种线性组合:比例控制器P、比例-积分控制器PI、比例-微分控制器PD和比例-积分-微分控制器PID。 这里说明:PID控制器和基本环节在数学模型表达上相同,但其本质内涵不同——狭义的基本环节是元部件物理原理的数学表示,控制器是控制方式的数学表示。从广义的基本环节上来看,基本环节包含PID控制器。 1.比例控制器的使用 比例控制律是最基础的控制器。实际上,所有的控制器都有比例增益,且发挥着主导作用,其他控制律都是对比例控制的修正改进。比例增益设定了控制器性能的边界,微分增益可以大大改善系统在高频区的性能,而积分增益改善了系统在低频区的性能。 1.1 P控制 比例控制器:控制率很简单:控制量∝误差。
指令与反馈信号之差形成误差error,误差与P控制器增益 P控制器的主要缺点是存在稳态误差。若存在固定扰动时,P控制律不能迅速响应。 用实例来理解P比例控制: 假设有一个不排水漏水的水缸,控制目标是保证水缸里的水位维持在1m的高度。初始时刻,水缸水位为0,和目标水位之间误差error=1m。我们给水缸加水,单纯用比例控制,就是加水量y和误差error成正比,即
如令 但是,假如有一个会排水漏水的水缸,每次都流出0.1m水位的水。当我们根据比例控制律加水至水位为0.8m之后,我们的加水量 稳定状态下,稳态值与目标值1m存在0.2m的误差,即稳态误差。 在实际系统中,这种类似水缸排水漏水的情况非常普遍,如负载电能消耗、运动阻力等。 1.2 如何调试P控制器 P控制器的调试比较直接:提高增益直至出现超调。 在不漏水排水的水缸水位控制实例中,如令KP=1.2 ,第一次加水,水位就到1.2,大于目标值1m,出现了超调;然后第二次就要取出水量 另外,控制系统中存在很多噪声源,如电磁干扰(开路接收无线电,接地环路感应电磁场)、传感器分辨率引入的随机噪声。高增益会放大噪声,减小增益可以缓解噪声,但增大了稳态误差。实际应用中,根据现场经验和需求,在高性能和小噪声之间做平衡,设置比例增益。 P控制器调试过程:
|


【本文地址】