基于CH32X035开发 PD(Sink/Source/DRP )应用 |
您所在的位置:网站首页 › pd快充介绍 › 基于CH32X035开发 PD(Sink/Source/DRP )应用 |
基于CH32X035开发 PD(Sink/Source/DRP )应用
|
芯片简介:
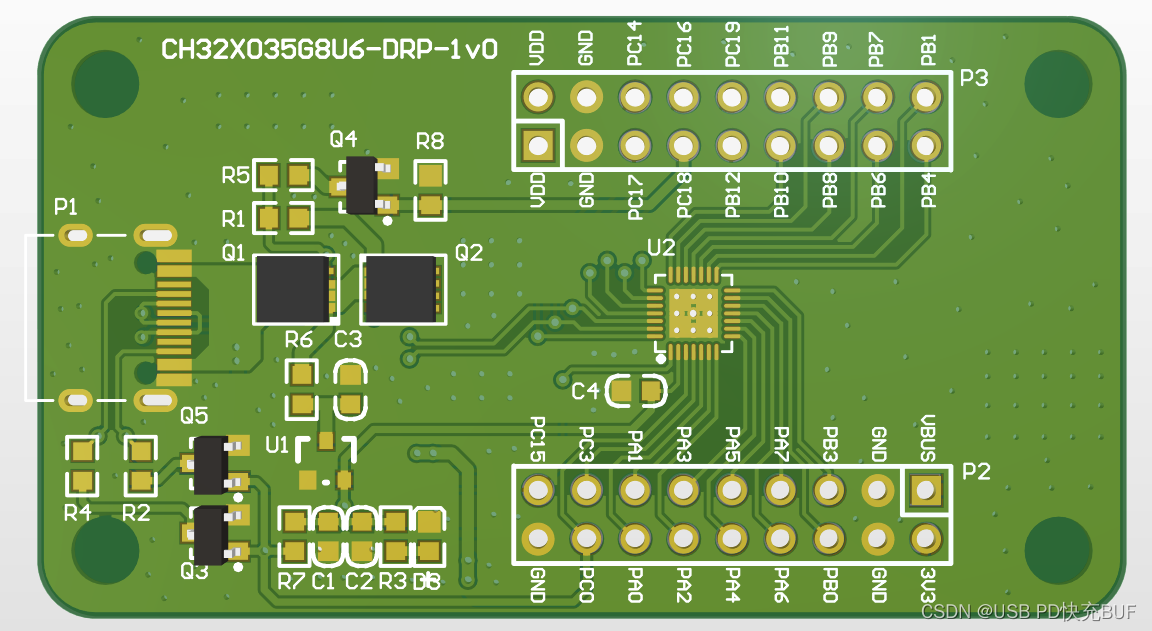
沁恒微电子最新推出基于青稞RISC-V 内核设计的工业级微控制器CH32X035,CH32X035内置 USB 和 PD PHY,支持 USB Host主机和 USB Device设备功能、USB PD及type C快充功能,内置可编程协议I/O控制器,提供了2 组OPA 运放、3组CMP电压比较器、4组USART串口、I2C、SPI、多组定时器、12位ADC、14 路Touchkey等丰富外设资源。 应用功能介绍:小编选取了CH32x035G8U6进行了相关应用的开发,例程目前可实现: 1、Sink端诱骗充电器输出不同的电压、 2、Source端对外给用电设备充电、 3、单C口DRP充放电、 针对三种不同的运行模式,工程中使用了宏定义进行相关功能的配置,仅需设置宏定义 PD_START_MODE 对应的参数值即可启动相关模式。 —————————————————————————————————— #ifndef PD_START_MODE #define START_SINK 0 #define START_SOURCE 1 #define START_DRP 2 #define PD_START_MODE START_DRP #endif —————————————————————————————————— 例: PD_START_MODE START_SINK 工程运行Sink模式 PD_START_MODE START_SOURCE 工程运行Source模式 PD_START_MODE START_DRP 工程运行DRP模式 硬件工程文件: 1、CH32x035G8U6-DRP-1V0原理图:
 3、PCB工程简介
3、PCB工程简介
CH32x035的CC引脚内部无5.1K下拉,所以采用外挂的形式来兼容Sink和DRP应用(两者需要5.1K下拉的存在),原理图中使用 PC0 引脚来控制 CC控制端口的下拉电阻 1:开启 0:关闭,后期设计可按需选择控制引脚。使用PC18来VBUS控制端口 MOS的开断 1:开启 0:关闭,(注:这里是我的设计失误,因使用了PC18导致SWD调试无法使用,后期设计需注意规避) 软件工程文件: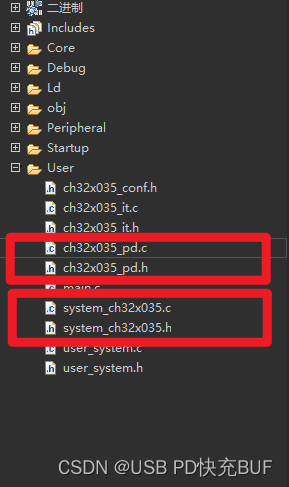 工程文件主要划分为:
PD操作函数:
/* Function extensibility */
void PD_Sink_Mode(void); /* 设置C口为Sink模式 */
void PD_Source_Mode(void); /* 设置C口为Source模式 */
void Fill_SrcCap_List(void); /* 自动填写SourceCap列表,只需设置总功率和档位 */
void Fill_Voltage_List(uint8_t VoltTemp);/* 自动填写请求电压让Source端输出电压 */
void Get_CC_Status(void); /* C口连接检测函数 */
uint8_t Get_Sink_Status(void); /* 获取Sink模式下CC的连接状态 */
uint8_t Get_Source_Status(void); /* 获取Source模式下CC的连接状态 */
void Set_CMP_Voltage(uint8_t bCC,uint8_t CMP_Volt);/* 设置CC的比较电压 */
uint8_t Check_Request_Voltage(void); /* 检测来源于Sink的请求电压是否符合规范 */
void PD_Recvd_Message( void ); /* PD物理层接收函数 */
void PD_Phy_SendPack(uint8_t SopType,uint8_t MsgLen);/* PD发送包函数 */
void PD_Send_Message(uint8_t Extend,uint8_t SopType,uint8_t MsgLen,uint8_t MsgType,uint8_t State,uint8_t LiatState);/*PD物理层发送函数*/
void PD_Main_Proc( ); /* PD 处理函数 */
/*********************************************************************
* @fn USBPD_IRQHandler
*
* @brief PD中断函数.
*
* @return none
*/
void USBPD_IRQHandler(void)
{
/* HRST复位中断 */
if(USBPD->STATUS & IF_RX_RESET)
{
USBPD->STATUS |= IF_RX_RESET;
/* 需添加CH32X035复位操作,此处未添加*/
}
/* 数据消息接收完成中断 */
if(USBPD->STATUS & IF_RX_ACT)
{
USBPD->STATUS |= IF_RX_ACT; /*清除中断 */
if(( USBPD->STATUS & MASK_PD_STAT ) == PD_RX_SOP0)
{
if((( PD_Rx_Buf[ 0 ] & 0x1F) == GoodCRC ) && (( PD_Rx_Buf[1] & 0x70) == 0 ))
{
PD_Ctrl.Basic.Config.RecvGoodCRC = ENABLE;
}else{
PD_Ctrl.Basic.Config.SpecRev = PD_Rx_Buf[0]>>6; /* Get version number */
Delay_Us(30); /* Delay 30us, answer GoodCRC */
PD_Tx_Buf[ 0 ] = (0x41 | (( PD_Ctrl.Basic.Config.DataRole)STATUS |= IF_TX_END; /* Clear the send interrupt flag */
USBPD->PORT_CC1 &= ~CC_LV0;
USBPD->PORT_CC2 &= ~CC_LV0;
if( PD_Ctrl.Basic.Config.SendGoodCRC)
{
PD_Ctrl.Basic.Config.SendGoodCRC = DISABLE;
PD_Ctrl.Basic.Config.MsgRecvd = ENABLE;
}
PD_Recvd_Message();
}
}
系统设置函数:
/*********************************************************************
* @fn System_PD_Init
*
* @brief This function uses to initialize PD Registers.
* SelMode: 0 sink;1 Source;2 DRP
* SnkReqVolt:0 、 5 、9 、12 、 15 、20
* SrcGears:0-7
* SrcPower :0-60W
* SrcDetTimer:0-255
* SnkDetTimer:0-255
* MainPower:0/1
* MainData: 0/1
* PowerStatus: 0/1
* @return none
*/
void System_PD_Init( void )
{
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_USBPD, ENABLE);
memset(&PD_Ctrl,0,sizeof(PD_Ctrl));
memset( &PD_Ctrl.Basic, 0x00, sizeof( BASIC_CONFIG ) );
#if(PD_START_MODE==START_SINK)
#if DebugPrintf
printf( "System_PD_Init:System operation mode:Sink \n" );
#endif
PD_Ctrl.Basic.Config.SnkReqVolt = 5;/*Sink、DRP :Set request voltage*/
PD_Sink_Mode(); /*Set Sink mode*/
#elif(PD_START_MODE==START_SOURCE)
#if DebugPrintf
printf( "System_PD_Init:System operation mode:Source \n" );
#endif
PD_Ctrl.Basic.Config.SrcGears = 5; /*Source、DRP :Set PD Gears*/
PD_Ctrl.Basic.Config.SrcPower = 35; /*Source、DRP :Set PD Power*/
PD_Source_Mode();
#elif(PD_START_MODE==START_DRP)
#if DebugPrintf
printf( "System_PD_Init:System operation mode:DRP \n" );
#endif
PD_Ctrl.Basic.Config.SnkReqVolt = 5; /*Sink、DRP :Set request voltage*/
PD_Ctrl.Basic.Config.SrcGears = 3; /*Source、DRP :Set PD Gears*/
PD_Ctrl.Basic.Config.SrcPower = 35; /*Source、DRP :Set PD Power*/
PD_Ctrl.Basic.Config.SrcDetTimer = 50;/*Source、DRP :Set Source Check Timer*/
PD_Ctrl.Basic.Config.SnkDetTimer = 30;/*Sink、DRP :Set Sink Check Timer*/
PD_Ctrl.Basic.Config.MainPower = 1; /*DRP :Set Primary power role*/
PD_Ctrl.Basic.Config.MainData = 1; /*DRP :Set Primary Data role*/
PD_Ctrl.Basic.Config.PowerStatus = 1; /*DRP :Set Current power role*/
PD_Source_Mode();
#endif
/*Source、DRP :Set the PD version*/
PD_Ctrl.Basic.Config.SpecRev = PD_SpecRev_3v0;
/*Source、DRP、SINK :Set the clock for sending and receiving PD:12M、24M、48M*/
PD_Ctrl.Basic.Config.TransFreq = UPD_TMR_TX_48M;
PD_Ctrl.Basic.Config.RecvdFreq = UPD_TMR_RX_48M;
/*Source、DRP、SINK :Set the power supply voltage for VDD*/
AFIO->CTLR |= USBPD_IN_HVT | USBPD_PHY_V33;
PD_Ctrl.State = Sta_DisConnect;
PD_Ctrl.Basic.Config.StartDete = ENABLE;
}
工程文件主要划分为:
PD操作函数:
/* Function extensibility */
void PD_Sink_Mode(void); /* 设置C口为Sink模式 */
void PD_Source_Mode(void); /* 设置C口为Source模式 */
void Fill_SrcCap_List(void); /* 自动填写SourceCap列表,只需设置总功率和档位 */
void Fill_Voltage_List(uint8_t VoltTemp);/* 自动填写请求电压让Source端输出电压 */
void Get_CC_Status(void); /* C口连接检测函数 */
uint8_t Get_Sink_Status(void); /* 获取Sink模式下CC的连接状态 */
uint8_t Get_Source_Status(void); /* 获取Source模式下CC的连接状态 */
void Set_CMP_Voltage(uint8_t bCC,uint8_t CMP_Volt);/* 设置CC的比较电压 */
uint8_t Check_Request_Voltage(void); /* 检测来源于Sink的请求电压是否符合规范 */
void PD_Recvd_Message( void ); /* PD物理层接收函数 */
void PD_Phy_SendPack(uint8_t SopType,uint8_t MsgLen);/* PD发送包函数 */
void PD_Send_Message(uint8_t Extend,uint8_t SopType,uint8_t MsgLen,uint8_t MsgType,uint8_t State,uint8_t LiatState);/*PD物理层发送函数*/
void PD_Main_Proc( ); /* PD 处理函数 */
/*********************************************************************
* @fn USBPD_IRQHandler
*
* @brief PD中断函数.
*
* @return none
*/
void USBPD_IRQHandler(void)
{
/* HRST复位中断 */
if(USBPD->STATUS & IF_RX_RESET)
{
USBPD->STATUS |= IF_RX_RESET;
/* 需添加CH32X035复位操作,此处未添加*/
}
/* 数据消息接收完成中断 */
if(USBPD->STATUS & IF_RX_ACT)
{
USBPD->STATUS |= IF_RX_ACT; /*清除中断 */
if(( USBPD->STATUS & MASK_PD_STAT ) == PD_RX_SOP0)
{
if((( PD_Rx_Buf[ 0 ] & 0x1F) == GoodCRC ) && (( PD_Rx_Buf[1] & 0x70) == 0 ))
{
PD_Ctrl.Basic.Config.RecvGoodCRC = ENABLE;
}else{
PD_Ctrl.Basic.Config.SpecRev = PD_Rx_Buf[0]>>6; /* Get version number */
Delay_Us(30); /* Delay 30us, answer GoodCRC */
PD_Tx_Buf[ 0 ] = (0x41 | (( PD_Ctrl.Basic.Config.DataRole)STATUS |= IF_TX_END; /* Clear the send interrupt flag */
USBPD->PORT_CC1 &= ~CC_LV0;
USBPD->PORT_CC2 &= ~CC_LV0;
if( PD_Ctrl.Basic.Config.SendGoodCRC)
{
PD_Ctrl.Basic.Config.SendGoodCRC = DISABLE;
PD_Ctrl.Basic.Config.MsgRecvd = ENABLE;
}
PD_Recvd_Message();
}
}
系统设置函数:
/*********************************************************************
* @fn System_PD_Init
*
* @brief This function uses to initialize PD Registers.
* SelMode: 0 sink;1 Source;2 DRP
* SnkReqVolt:0 、 5 、9 、12 、 15 、20
* SrcGears:0-7
* SrcPower :0-60W
* SrcDetTimer:0-255
* SnkDetTimer:0-255
* MainPower:0/1
* MainData: 0/1
* PowerStatus: 0/1
* @return none
*/
void System_PD_Init( void )
{
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_USBPD, ENABLE);
memset(&PD_Ctrl,0,sizeof(PD_Ctrl));
memset( &PD_Ctrl.Basic, 0x00, sizeof( BASIC_CONFIG ) );
#if(PD_START_MODE==START_SINK)
#if DebugPrintf
printf( "System_PD_Init:System operation mode:Sink \n" );
#endif
PD_Ctrl.Basic.Config.SnkReqVolt = 5;/*Sink、DRP :Set request voltage*/
PD_Sink_Mode(); /*Set Sink mode*/
#elif(PD_START_MODE==START_SOURCE)
#if DebugPrintf
printf( "System_PD_Init:System operation mode:Source \n" );
#endif
PD_Ctrl.Basic.Config.SrcGears = 5; /*Source、DRP :Set PD Gears*/
PD_Ctrl.Basic.Config.SrcPower = 35; /*Source、DRP :Set PD Power*/
PD_Source_Mode();
#elif(PD_START_MODE==START_DRP)
#if DebugPrintf
printf( "System_PD_Init:System operation mode:DRP \n" );
#endif
PD_Ctrl.Basic.Config.SnkReqVolt = 5; /*Sink、DRP :Set request voltage*/
PD_Ctrl.Basic.Config.SrcGears = 3; /*Source、DRP :Set PD Gears*/
PD_Ctrl.Basic.Config.SrcPower = 35; /*Source、DRP :Set PD Power*/
PD_Ctrl.Basic.Config.SrcDetTimer = 50;/*Source、DRP :Set Source Check Timer*/
PD_Ctrl.Basic.Config.SnkDetTimer = 30;/*Sink、DRP :Set Sink Check Timer*/
PD_Ctrl.Basic.Config.MainPower = 1; /*DRP :Set Primary power role*/
PD_Ctrl.Basic.Config.MainData = 1; /*DRP :Set Primary Data role*/
PD_Ctrl.Basic.Config.PowerStatus = 1; /*DRP :Set Current power role*/
PD_Source_Mode();
#endif
/*Source、DRP :Set the PD version*/
PD_Ctrl.Basic.Config.SpecRev = PD_SpecRev_3v0;
/*Source、DRP、SINK :Set the clock for sending and receiving PD:12M、24M、48M*/
PD_Ctrl.Basic.Config.TransFreq = UPD_TMR_TX_48M;
PD_Ctrl.Basic.Config.RecvdFreq = UPD_TMR_RX_48M;
/*Source、DRP、SINK :Set the power supply voltage for VDD*/
AFIO->CTLR |= USBPD_IN_HVT | USBPD_PHY_V33;
PD_Ctrl.State = Sta_DisConnect;
PD_Ctrl.Basic.Config.StartDete = ENABLE;
}
PD_Ctrl.Basic.Config.SnkReqVolt = 5;即可让充电器输出5V电压(数值可选:5/9/12/15/20) PD_Ctrl.Basic.Config.SrcGears = 3; 设置SourceCap的档位值,3表示一共有3档5/9/12 PD_Ctrl.Basic.Config.SrcPower = 35; 设置SourceCap的功率,配合SrcGears求电流 PD_Ctrl.Basic.Config.SrcDetTimer = 50;针对DRP检测时Source状态下的检测时间 PD_Ctrl.Basic.Config.SnkDetTimer = 30;针对DRP检测时Sink状态下的检测时间 PD_Ctrl.Basic.Config.MainPower = 1; 设置DRP运行的主要电源角色 PD_Ctrl.Basic.Config.MainData = 1; 设置DRP运行的主要数据角色 PD_Ctrl.Basic.Config.PowerStatus = 1; 设置DRP运行时起始的电源角色 以上为工程的大致介绍,通过配置参数即可运行不同的模式。 如需工程文件请私信Call我! |

【本文地址】
今日新闻 |
推荐新闻 |