树莓派python OpenCV捕获颜色块并通过串口返回坐标信息 |
您所在的位置:网站首页 › opencv识别色块 › 树莓派python OpenCV捕获颜色块并通过串口返回坐标信息 |
树莓派python OpenCV捕获颜色块并通过串口返回坐标信息
|
树莓派python OpenCV捕获颜色块并通过串口返回坐标信息
树莓派python OpenCV捕获颜色块并通过串口返回坐标信息介绍开发环境思路代码串口部分图像处理部分
后续处理
树莓派python OpenCV捕获颜色块并通过串口返回坐标信息
介绍
该代码起初是用在无人机寻找彩色物体定位上面,在无人机上面挂载树莓派,借助树莓派的高运算能力和可拓展性来弥补飞控的不足。在摄像头通过USB接口挂载到树莓派上,借助OpenCV来进行图像处理,并通过串口发送彩色物体位置信息给飞控,以实现无人机的定位。实则代码可以用在其他任何场景。 开发环境在Windows下通过pycharm pro通过SSH连接树莓派进行传输数据和调试程序。这样的好处是具有代码补全和提示功能,提高效率。 在pycharm pro工程里的setting找到project Interpreter选择add如图:
首先从摄像头获取图像>择摄像头中心为ROI>缩小图像降低处理时间>转换为hsv颜色空间>提取出指定颜色(这里为蓝色)>灰度处理>二值化>膨胀消除内部干扰>找出重心>串口编码>发送坐标。 代码 串口部分 # -*- coding:utf-8 -*- import serial import time # 串口配置 def serialConfig(port, buat): ser = serial.Serial(port, buat) ser.flushInput() ser.flushOutput() if ser.isOpen() is False: ser.open() return True, ser return True, ser if __name__ == "__main__": isOpen, Ser = serialConfig("/dev/ttyAMA0", 9600) if isOpen is True: try: while True: size = Ser.inWaiting() # 获得缓冲区字符 if size != 0: response = Ser.read(size) # 读取内容并显示 print response Ser.write(bytes(response)) Ser.flushOutput() Ser.flushInput() # 清空接收缓存区 time.sleep(0.2) # 软件延时 except KeyboardInterrupt: Ser.close() else: print("port false") 图像处理部分 # -*- coding:utf-8 -*- import cv2 import tkinter import numpy as np import time import SerialPort as sp win = tkinter.Tk(':0.0') # 指定输出设备,否则报错 必须加这一句 不然找不到显示设备将报错 cv2.setUseOptimized(True) # 优化opencv # 蓝色阈值 lower_blue = np.array([50, 50, 50]) upper_blue = np.array([130, 255, 255]) # 可以这样知道想要查找颜色对应的hsv空间 # green = np.uint8([[[0, 255, 0]]]) # hsv_green = cv2.cvtColor(green, cv2.COLOR_BGR2HSV) lastCX = 0 lastCY = 0 cx = 0 cy = 0 def image_process(frame): global cx, cy global lastCY, lastCX times = cv2.getTickCount() hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) mask = cv2.inRange(hsv, lower_blue, upper_blue) # 得到蓝色掩模 blue = cv2.bitwise_and(frame, frame, mask=mask) # 位与 gray = cv2.cvtColor(blue, cv2.COLOR_BGR2GRAY) # 灰度处理 # cv2.medianBlur(gray, 3) # 中值滤波 # bin_blue = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 2) temp, bin_blue = cv2.threshold(gray, 50, 255, cv2.THRESH_BINARY) # 简单二值化 kernel = np.ones((10, 10), np.uint8) # 膨胀将要用到的内核 bin_blue = cv2.erode(bin_blue, kernel, iterations=1) # 膨胀以消除内部干扰 # 获取图像轮廓 dst_image, contours, hierarchy = cv2.findContours(bin_blue, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) frame = cv2.drawContours(frame, contours, -1, (0, 255, 0), 2) # 原始图像上画出轮廓 m = cv2.moments(dst_image) # 寻找轮廓的距 lastCX = cx lastCY = cy try: #防止除零发生异常 cx = int(m['m10'] / m['m00']) # 计算重心 cy = int(m['m01'] / m['m00']) cv2.circle(frame, (cx, cy), 5, (0, 0, 255), -1) # 标记重心 cx = cx - 120 cy = cy - 120 except ZeroDivisionError: cy = lastCY cx = lastCX cv2.circle(frame, (cx+120, cy+120), 5, (0, 0, 255), -1) # 标记重心 if cx > 120: cx = 120 if cy >120: cy = 120 if cx |
 然后选择SSH Interpreter后输入Host 和 Username 点击下一步按照提示即可连接上树莓派。
然后选择SSH Interpreter后输入Host 和 Username 点击下一步按照提示即可连接上树莓派。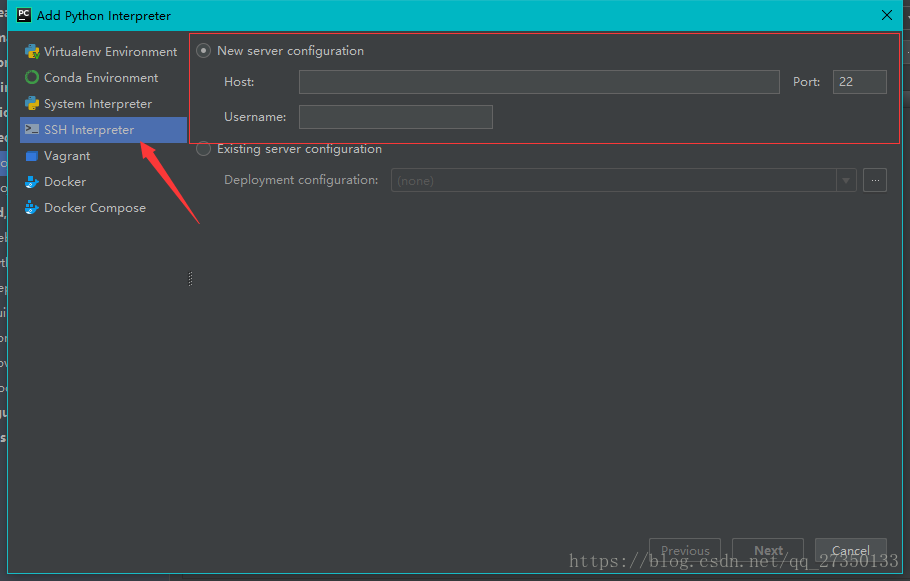 在连接上树莓派后,它会从树莓派上下载python虚拟环境,需要一定的时间,下载完成后就可以像在树莓派上编写程序了。pyCharm很强大,在同步过后有很多实用 的功能值得去探索。包括代码同步,代码对比等等。 远程调试树莓派(PyCharm实现)
在连接上树莓派后,它会从树莓派上下载python虚拟环境,需要一定的时间,下载完成后就可以像在树莓派上编写程序了。pyCharm很强大,在同步过后有很多实用 的功能值得去探索。包括代码同步,代码对比等等。 远程调试树莓派(PyCharm实现)【本文地址】
今日新闻 |
推荐新闻 |