Opencv基于Python图像轮廓 |
您所在的位置:网站首页 › opencv标注 › Opencv基于Python图像轮廓 |
Opencv基于Python图像轮廓
|
轮廓入门
目标1. 轮廓入门1.1 什么是轮廓1. 2 如何绘制轮廓1.3 轮廓近似方法
2. 轮廓特征2.1 特征矩2.2 轮廓面积2.3 轮廓周长2.4 轮廓近似2.5 轮廓凸包2.6 检查凸度2.7 边界矩形2.7.1 直边外接矩形2.7.2 旋转矩形(最小外接矩形)
2.8 最小外接圆2.9 椭圆拟合2.10 直线拟合
3. 结语
目标
在本篇文章中,我们将学习到以下内容: 了解轮廓是什么学习查找轮廓,绘制轮廓等轮廓入门部分你将学到以下函数:cv.findContours(),cv.drawContours()如何找到轮廓的不同特征,例如面积,周长,质心,边界框等轮廓特征部分你将学习到大量与轮廓有关的功能 1. 轮廓入门 1.1 什么是轮廓轮廓可以简单地解释为连接具有相同颜色或强度的所有连续点(沿边界)的曲线,轮廓是用于形状分析以及对象检测和识别的有用工具。 为了获得更高的准确性,请使用二进制图像。因此,在找到轮廓之前,请应用阈值或canny边缘检测。从OpenCV 3.2开始,findContours()不再修改原图像。在OpenCV中,找到轮廓就像从黑色背景中找到白色物体。因此请记住,一般需要找到的对象应该是白色,背景应该是黑色。下面让我们看看如何找到二进制图像的轮廓: 代码1.1: import numpy as np import cv2 as cv # 读取图像 img = cv.imread('./data/test.png') # 灰度化 imggray = cv.cvtColor(img, cv.COLOR_BGR2GRAY) # 二值化 ret, thresh = cv.threshold(imggray, 127, 255, 0) # 轮廓提取 img2, contours, hierarchy = cv.findContours(thresh, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE) # 第三个参数传递值为-1,绘制所有轮廓 cv.drawContours(img, contours, -1, (0, 255, 0), 3) # cv.drawContours(img, contours, 3, (0, 255, 0), 3) # cnt = contours[3] # cv.drawContours(img, [cnt], 0, (0, 255, 0), 3) # 显示轮廓 cv.namedWindow('drawContours', 0) cv.imshow('drawContours', img) cv.waitKey()findcontour()函数中有三个参数,第一个是原图像,第二个是轮廓检索模式,第三个是轮廓逼近方法,输出等高线和层次结构。轮廓是图像中所有轮廓的Python列表,每个单独的轮廓是一个(x,y)坐标的Numpy数组的边界点的对象。 效果如下图所示: 注意: 接下来我们将详细讨论第二和第三个参数以及有关层次的结构,在此之前,代码示例中赋予它们的值将适用于所有图像。 1. 2 如何绘制轮廓要绘制轮廓,请使用cv.drawContours函数。只要有边界点,它也可以用来绘制任何形状,它的第一个参数是原图像,第二个参数是应该作为Python列表传递的轮廓,第三个参数是轮廓的索引(在绘制单个轮廓时有用,要绘制所有轮廓,请传递-1),其余参数是颜色,宽度等等。 在图像中绘制所有轮廓: cv.drawContours(img, contours, -1, (0,255,0), 3) 绘制单个轮廓,如第四个轮廓,仅需修改上述第13行代码参数即可: cv.drawContours(img, contours, 3, (0,255,0), 3)效果如下图所示: 注意: 最后两种方法相似,但是学习到后面时,你会发现最后一种更有用。 1.3 轮廓近似方法这是cv.findContours函数中的第三个参数。它实际上表示什么? 上面我们说的是轮廓强度相同形状的边界,它存储形状边界的(x,y)坐标,但是它存储所有坐标吗?其实它是通过轮廓近似方法指定的。 如果传递cv.CHAIN_APPROX_NONE,则将存储所有边界点,但是实际上我们需要所有这些点吗?例如,你找到了一条直线的轮廓。你是否需要线上的所有点来代表该线?不,我们只需要该线的两个端点即可。这就是cv.CHAIN_APPROX_SIMPLE所做的。它删除所有冗余点并压缩轮廓,从而节省内存。 下面的矩形图像演示了此技术,只需在轮廓数组中的所有坐标上绘制一个环(以绿色绘制),第一幅图像显示了我用cv.CHAIN_APPROX_NONE获得的效果(734个点),第二幅图像显示了我用cv.CHAIN_APPROX_SIMPLE获得的效果(只有4个点)。可以看到,它可以节省大量内存!!! 在本章节部分,我们将学习以下内容: 如何找到轮廓的不同特征,例如面积,周长,质心,边界框等实现大量与轮廓有关的功能 2.1 特征矩特征矩可以帮助计算一些特征,例如物体的质心,物体的面积等,函数cv.moments()提供了所有计算出的矩值的字典。此时,你可以提取有用的数据,例如面积,质心等。 质心由关系给出, C x = M 10 M 00 和 C y = M 01 M 00 C_x = \frac{M_{10}}{M_{00}} 和 C_y = \frac{M_{01}}{M_{00}} Cx=M00M10和Cy=M00M01可以按照以下步骤进行,代码如下(以下接着往代码1.1后面写): #轮廓重心 cnt = contours[0] M = cv.moments(cnt) print(M) cx = int(M['m10']/M['m00']) cy = int(M['m01']/M['m00']) print(cx, cy)打印结果: {‘m00’: 68783.5, ‘m10’: 20155656.333333332, ‘m01’: 14859279.833333332, ‘m20’: 6282709635.75, ‘m11’: 4354277664.625, ‘m02’: 3586551591.25, ‘m30’: 2061672731334.2002, ‘m21’: 1357287605165.4, ‘m12’: 1050991274868.0667, ‘m03’: 937472298913.9501, ‘mu20’: 376489652.36095905, ‘mu11’: 56991.3312997818, ‘mu02’: 376505618.5195246, ‘mu30’: 2005762.1354980469, ‘mu21’: 2238986.5301361084, ‘mu12’: -1986528.7002563477, ‘mu03’: -2217792.504638672, ‘nu20’: 0.07957643934309044, ‘nu11’: 1.2045927928746822e-05, ‘nu02’: 0.07957981401764169, ‘nu30’: 1.6164741035372612e-06, ‘nu21’: 1.804433177832962e-06, ‘nu12’: -1.6009735865816214e-06, ‘nu03’: -1.7873525914762914e-06} 293 216 2.2 轮廓面积轮廓区域由函数cv.contourArea()或从矩 M[‘m00’] 中给出 #轮廓面积 area = cv.contourArea(cnt) print (area)打印结果: 68783.5 2.3 轮廓周长轮廓周长也称为弧长。可以使用cv.arcLength()函数计算得到,第二个参数指定形状是闭合轮廓( True )还是曲线。 #轮廓周长 perimeter = cv.arcLength(cnt,True) print (perimeter)打印结果: 981.9036719799042 2.4 轮廓近似根据我们指定的精度,它可以将轮廓形状近似为顶点数量较少的其他形状,它是Douglas-Peucker算法的实现。 为了理解这一点,假设我们试图在图像中找到一个矩形,但是由于图像中的某些问题,我们没有得到一个完美的矩形,而是一个“坏形状”(如下图所示),现在,你可以使用此功能来近似形状。在这种情况下,第二个参数称为epsilon,它是从原始轮廓到近似轮廓的最大距离。它是一个精度参数,需要正确选择epsilon才能获得正确的输出。 代码2.4: import numpy as np import cv2 as cv img = cv.imread('./data/approximate.png') imggray = cv.cvtColor(img, cv.COLOR_BGR2GRAY) ret, thresh = cv.threshold(imggray, 127, 255, cv.THRESH_OTSU) img2, contours, hierarchy = cv.findContours(thresh, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE) cv.imshow('img', img2) cnt = contours[0] epsilon = 0.1*cv.arcLength(cnt, True) # epsilon = 0.01*cv.arcLength(cnt, True) approx = cv.approxPolyDP(cnt, epsilon, True) cv.polylines(img, [approx], True, (0, 255, 0), 3) cv.imshow('epsilon = 10% ', img) # cv.imshow('epsilon = 1% ', img) cv.waitKey(0) cv.destroyAllWindows()下面,在第二张图片中,绿线显示了ε=弧长的10%时的近似曲线。第三幅图显示了ε=弧长度的1%时的情况。第三个参数指定曲线是否闭合。
凸包外观看起来与轮廓近似相似,但不同(在某些情况下两者可能提供相同的结果)。在这里,cv.convexHull()函数检查曲线是否存在凸凹缺陷并对其进行校正。一般而言,凸曲线是始终凸出或至少平坦的曲线,如果在内部凸出,则称为凸度缺陷,例如,检查下面的手的图像,红线显示手的凸包,双向箭头标记显示凸度缺陷,这是凸包与轮廓线之间的局部最大偏差。
cv.isContourConvex()具有检查曲线是否凸出的功能,它只是返回True还是False。 #凸性检测 k = cv.isContourConvex(cnt) print (k)False False结果说明上述轮廓没有凸包处。 2.7 边界矩形有两种类型的边界矩形,一是直边外接矩形,二是旋转矩形(最小外接矩形)。 2.7.1 直边外接矩形它是一个矩形,不考虑物体的旋转,所以边界矩形的面积不是最小的。它是由函数cv.boundingRect()计算得到。 令(x,y) 为矩形的左上角坐标,而 (w,h)为矩形的宽度和高度。 x,y,w,h = cv.boundingRect(cnt) cv.rectangle(img,(x,y),(x+w,y+h),(0,255,0),3)代码2.7.1: import numpy as np import cv2 as cv img = cv.imread('./data/boundingRect.png') imggray = cv.cvtColor(img, cv.COLOR_BGR2GRAY) ret, thresh = cv.threshold(imggray, 127, 255, cv.THRESH_OTSU) img2, contours, hierarchy = cv.findContours(thresh, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE) cnt = contours[1] # (x, y)为矩形左上角的坐标, (w, h)是矩形的宽和高 x, y, w, h = cv.boundingRect(cnt) # 直边外接矩形 img_boundingRect = cv.rectangle(img, (x, y), (x+w, y+h), (0, 255, 0), 3) cv.imshow('boundingRect', img_boundingRect) cv.waitKey() cv.destroyAllWindows()
这里,边界矩形是用最小面积绘制的,所以它也考虑了旋转。使用的函数是 cv.minAreaRect(),它返回一个Box2D结构,其中包含以下细节 (中心(x,y),(宽度,高度),旋转角度)。但要画出这个矩形,我们需要矩形的四个角点,它由函数cv.boxPoints()获得。 rect = cv.minAreaRect(cnt) box = cv.boxPoints(rect) box = np.int0(box) cv.drawContours(img,[box],0,(0,0,255),3)代码2.7.2: import numpy as np import cv2 as cv img = cv.imread('./data/boundingRect.png') imggray = cv.cvtColor(img, cv.COLOR_BGR2GRAY) ret, thresh = cv.threshold(imggray, 127, 255, cv.THRESH_OTSU) img2, contours, hierarchy = cv.findContours(thresh, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE) cnt = contours[1] # (x, y)为矩形左上角的坐标, (w, h)是矩形的宽和高 x, y, w, h = cv.boundingRect(cnt) # 直边外接矩形 img_boundingRect = cv.rectangle(img, (x, y), (x+w, y+h), (0, 255, 0), 3) # cv.imshow('boundingRect', img_boundingRect) # 最小外接矩形 img_AreaRect = cv.minAreaRect(cnt) box = cv.boxPoints(img_AreaRect) box = np.int0(box) cv.drawContours(img_boundingRect, [box], 0, (0, 0, 255), 3) cv.imshow('minAreaRect', img_boundingRect) cv.waitKey() cv.destroyAllWindows()如下图所示,两个矩形都显示在一张单独的图像中,绿色矩形显示正常的边界矩形,红色矩形是旋转后的矩形。 接下来,使用函数cv.minEnclosingCircle()查找对象的圆周,它是一个以最小面积完全覆盖物体的圆。 (x,y),radius = cv.minEnclosingCircle(cnt) center = (int(x),int(y)) radius = int(radius) cv.circle(img,center,radius,(0,255,0),3)2.8代码: import numpy as np import cv2 as cv img = cv.imread('./data/boundingRect.png') imggray = cv.cvtColor(img, cv.COLOR_BGR2GRAY) ret, thresh = cv.threshold(imggray, 127, 255, cv.THRESH_OTSU) img2, contours, hierarchy = cv.findContours(thresh, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE) cnt = contours[1] # 最小外接圆 (x, y), radius = cv.minEnclosingCircle(cnt) center = (int(x), int(y)) radius = int(radius) img_minEnclosingCircle = cv.circle(img, center, radius, (0, 255, 0), 3) cv.imshow('minEnclosingCircle', img_minEnclosingCircle) cv.waitKey() cv.destroyAllWindows()
接下来是把一个椭圆拟合到一个对象上,它返回内接椭圆的旋转矩形。 ellipse = cv.fitEllipse(cnt) cv.ellipse(img,ellipse,(0,255,0),3)2.9代码: import numpy as np import cv2 as cv img = cv.imread('./data/boundingRect.png') imggary = cv.cvtColor(img, cv.COLOR_BGR2GRAY) ret, thresh = cv.threshold(imggary, 127, 255, cv.THRESH_OTSU) img2, contours, hierarchy = cv.findContours(thresh, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE) cnt = contours[1] # 椭圆拟合 ellipse = cv.fitEllipse(cnt) img_fitEllipse = cv.ellipse(img, ellipse, (0, 255, 0), 3) cv.imshow('fitEllipse', img_fitEllipse) cv.waitKey() cv.destroyAllWindows()
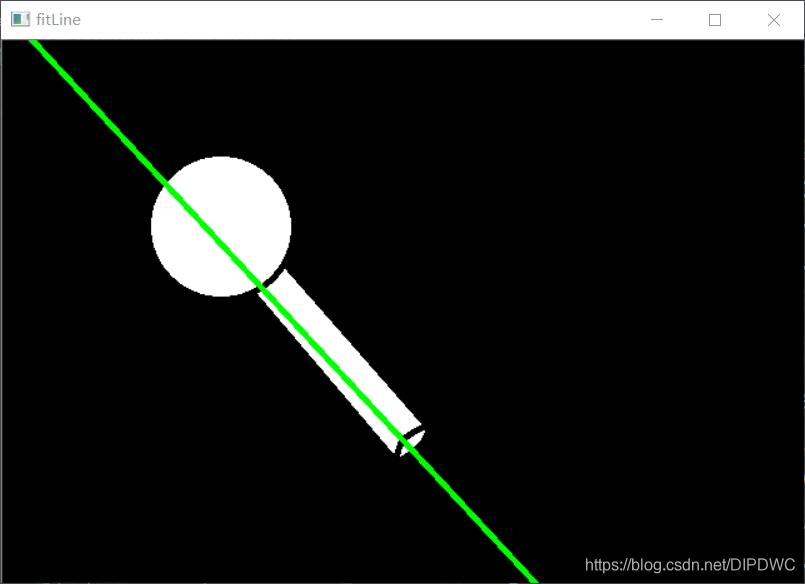
同样,我们可以将一条直线拟合到一组点上,下图包含一组白点,我们可以近似一条直线。 rows,cols = img.shape[:2] [vx,vy,x,y] = cv.fitLine(cnt, cv.DIST_L2,0,0.01,0.01) lefty = int((-x*vy/vx) + y) righty = int(((cols-x)*vy/vx)+y) cv.line(img,(cols-1,righty),(0,lefty),(0,255,0),3)代码2.10: import numpy as py import cv2 as cv img = cv.imread('./data/boundingRect.png') imggray = cv.cvtColor(img, cv.COLOR_BGR2GRAY) ret, thresh = cv.threshold(imggray, 127, 255, cv.THRESH_OTSU) img2, contours, hierarchy = cv.findContours(imggray, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE) cnt = contours[1] # 直线拟合 rows, cols = img.shape[:2] [vx, vy, x, y] = cv.fitLine(cnt, cv.DIST_L12, 0, 0.01, 0.01) leftty = int((-x*vy/vx)+y) righty = int(((cols-x)*vy/vx)+y) img_fitLine = cv.line(img, (cols-1, righty), (0, leftty), (0, 255, 0), 3) cv.imshow('fitLine', img_fitLine) cv.waitKey() cv.destroyAllWindows()
图像轮廓是图像处理板块中比较多且比较重要的内容,本篇文章主要是图像轮廓及其特征部分,今天的内容暂时写到这里了,后期小编还会更新轮廓属性部分,如果文章对你有帮助,希望您一键三连哦~~ |







 代码2.5:
代码2.5:




【本文地址】
今日新闻 |
推荐新闻 |