|
OpenCV-Python 相机标定
前言一、相机标定原理二、OpenCV 安装及 Pycharm 配置(macOS)1. OpenCV 安装2. Pycharm 安装及配置
三、相机标定实例教程
前言
如题,我之前完全没接触过 OpenCV,对相机标定的原理也不了解,这篇文章是一个小白从零开始的学习历程,包括踩过的坑。
主要参考的资料包括: [1] OpenCV 官方文档 [2]一个开源的视觉机械臂项目:hta0
一、相机标定原理
关于相机标定的原理,网上有很多资料,在此就不赘述了,我们主要讲实际操作。 如果对原理部分感兴趣的话,可以阅读这篇博客:Calculate X, Y, Z Real World Coordinates from Image Coordinates using OpenCV,本文使用的代码也是源自 hta0 项目。 本文的主要目标,如下图所示:  就是求出相机的 Distortion coefficients 和它的内参数:camera matrix 就是求出相机的 Distortion coefficients 和它的内参数:camera matrix
二、OpenCV 安装及 Pycharm 配置(macOS)
版本:macOS Big Sur 11.2.3
1. OpenCV 安装
首先,还是要把 OpenCV 安装好啦(我的版本是 OpenCV 4.5.1),详细教程见:Install OpenCV on MacOS
注意啦:我这篇教程是参考的网上的安装流程,所以也安装了 Xcode,主要是针对 OpenCV-C++, 如果只想用 OpenCV-Python 的话,可以省略这一步,直接安装 Pycharm 就好。
2. Pycharm 安装及配置
安装 Python IDE 我选择的是 Pycharm,安装方法我参考的是这篇,如果想快速上手,可以直接在 Pycharm 官网下载,选择专业版试用(我的版本是 Pycharm 2020.3),反正也能用30天嘛配置 (1) 首先创建一个 new project,如图项目名称为 pythonProject,点击 create 即可:  (2) Pycharm - Preferences - Project - Python Interpreter,点击窗口左下角的 + ,搜索 opencv-python,numpy等包进行安装 (2) Pycharm - Preferences - Project - Python Interpreter,点击窗口左下角的 + ,搜索 opencv-python,numpy等包进行安装   (3) 检查一下,在我们这个刚创建的 pythonProject 中的 main.py 中输入:
import cv2 (3) 检查一下,在我们这个刚创建的 pythonProject 中的 main.py 中输入:
import cv2
运行结果如下,说明配置成功:  (4) 下面我们可以运行一个简单的例程,利用 OpenCV 显示图片 在桌面创建图片:pic1.jpg,那么如何知道它的路径呢:右键显示简介,如图所示复制选中部分(即位置信息,粘贴后就是英文路径了) (4) 下面我们可以运行一个简单的例程,利用 OpenCV 显示图片 在桌面创建图片:pic1.jpg,那么如何知道它的路径呢:右键显示简介,如图所示复制选中部分(即位置信息,粘贴后就是英文路径了)  在 main.py 中输入以下代码: 在 main.py 中输入以下代码:
import numpy as np
import cv2
img = cv2.imread("/Users/olefine/Desktop/pic1.jpg") # 读取图片
cv2.imshow("image", img) # 显示图片,命名为 image
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果如下(Pikachu被迫二次营业,嘻嘻): 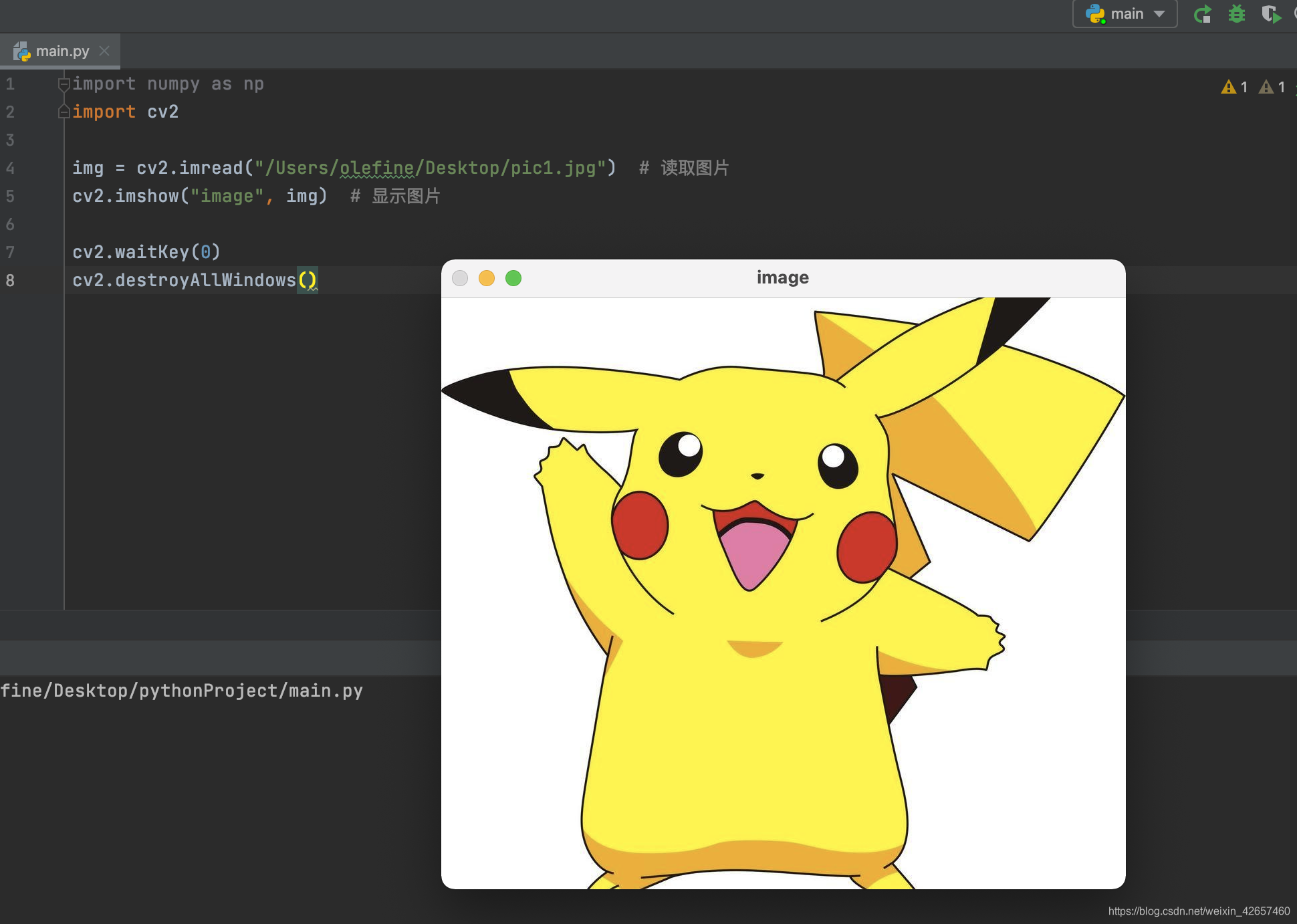
三、相机标定实例教程
这部分我们就要开始相机标定的实际操作啦 由于我还没有买相机,所以这次我们使用 hta0 项目中现成的棋盘格以及标定图片,后面买了相机之后会附上自己的标定过程
首先,从这里 [link]把 hta0 项目 download 下来,我们只需要关注相机标定的部分,包括文件夹:camera_data(用于存储x,所以我们先把这个文件夹清空,运行了标定程序后会自动生成文件),calibration_images(40张不同角度的棋盘标定照片),和文件:initial_camera_calibration.py(标定程序)
 各个文件(夹)用途说明: 各个文件(夹)用途说明: 
把下载的项目文件夹,重命名为 hta0,并存储在桌面,如图所示:  calibration_images 文件夹,包含40张不同角度的棋盘格照片: calibration_images 文件夹,包含40张不同角度的棋盘格照片:  在 Pycharm 中打开程序
打开项目:Desktop - hta0 - Open: 在 Pycharm 中打开程序
打开项目:Desktop - hta0 - Open:  打开程序:initial_camera_calibration.py 打开程序:initial_camera_calibration.py 
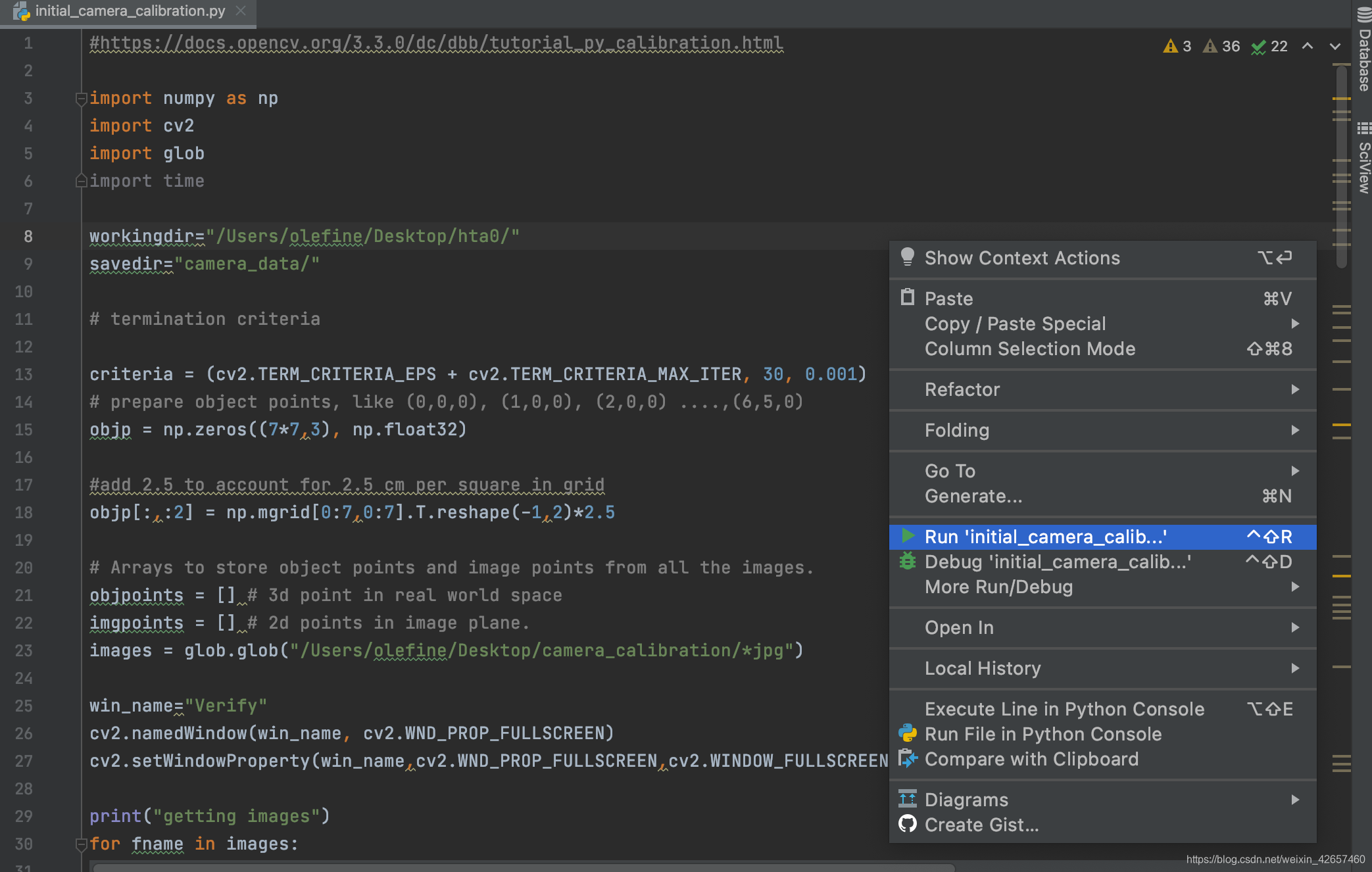
注意啦,有时候打开 .py 文件会出现右上角 run 按钮(绿色)是灰色的情况,这时候只要右键选择 Run就可以(如下图所示):
修改程序中的路径 打开程序后,还不能直接运行,我们需要修改一下代码中的几处路径: 首先是 camera calibration files 的存储路径
workingdir="/Users/olefine/Desktop/hta0/"
savedir="camera_data/"
 还有棋盘格标定图片的路径,这里我改成绝对路径,不容易出错 还有棋盘格标定图片的路径,这里我改成绝对路径,不容易出错
images = glob.glob("/Users/olefine/Desktop/hta0/calibration_images/*jpg")
 修改后的标定程序: 修改后的标定程序:
import numpy as np
import cv2
import glob
import time
workingdir="/Users/olefine/Desktop/hta0/"
savedir="camera_data/"
# termination criteria
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# prepare object points, like (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0)
objp = np.zeros((7*7,3), np.float32)
#add 2.5 to account for 2.5 cm per square in grid
objp[:,:2] = np.mgrid[0:7,0:7].T.reshape(-1,2)*2.5
# Arrays to store object points and image points from all the images.
objpoints = [] # 3d point in real world space
imgpoints = [] # 2d points in image plane.
images = glob.glob("/Users/olefine/Desktop/hta0/calibration_images/*jpg")
win_name="Verify"
cv2.namedWindow(win_name, cv2.WND_PROP_FULLSCREEN)
cv2.setWindowProperty(win_name,cv2.WND_PROP_FULLSCREEN,cv2.WINDOW_FULLSCREEN)
print("getting images")
for fname in images:
img = cv2.imread(fname)
print(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Find the chess board corners
ret, corners = cv2.findChessboardCorners(gray, (7,7), None)
# If found, add object points, image points (after refining them)
if ret == True:
objpoints.append(objp)
corners2=cv2.cornerSubPix(gray,corners, (11,11), (-1,-1), criteria)
imgpoints.append(corners)
# Draw and display the corners
cv2.drawChessboardCorners(img, (7,7), corners2, ret)
cv2.imshow(win_name, img)
cv2.waitKey(500)
img1=img
cv2.destroyAllWindows()
print(">==> Starting calibration")
ret, cam_mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
#print(ret)
print("Camera Matrix")
print(cam_mtx)
np.save(savedir+'cam_mtx.npy', cam_mtx)
print("Distortion Coeff")
print(dist)
np.save(savedir+'dist.npy', dist)
print("r vecs")
print(rvecs[2])
print("t Vecs")
print(tvecs[2])
print(">==> Calibration ended")
h, w = img1.shape[:2]
print("Image Width, Height")
print(w, h)
#if using Alpha 0, so we discard the black pixels from the distortion. this helps make the entire region of interest is the full dimensions of the image (after undistort)
#if using Alpha 1, we retain the black pixels, and obtain the region of interest as the valid pixels for the matrix.
#i will use Apha 1, so that I don't have to run undistort.. and can just calculate my real world x,y
newcam_mtx, roi=cv2.getOptimalNewCameraMatrix(cam_mtx, dist, (w,h), 1, (w,h))
print("Region of Interest")
print(roi)
np.save(savedir+'roi.npy', roi)
print("New Camera Matrix")
#print(newcam_mtx)
np.save(savedir+'newcam_mtx.npy', newcam_mtx)
print(np.load(savedir+'newcam_mtx.npy'))
inverse = np.linalg.inv(newcam_mtx)
print("Inverse New Camera Matrix")
print(inverse)
# undistort
undst = cv2.undistort(img1, cam_mtx, dist, None, newcam_mtx)
# crop the image
#x, y, w, h = roi
#dst = dst[y:y+h, x:x+w]
#cv2.circle(dst,(308,160),5,(0,255,0),2)
cv2.imshow('img1', img1)
cv2.waitKey(5000)
cv2.destroyAllWindows()
cv2.imshow('img1', undst)
cv2.waitKey(5000)
cv2.destroyAllWindows()
运行结果
>==> Starting calibration
Camera Matrix
[[1.11378508e+03 0.00000000e+00 6.38266808e+02]
[0.00000000e+00 1.09831926e+03 3.46949583e+02]
[0.00000000e+00 0.00000000e+00 1.00000000e+00]]
Distortion Coeff
[[ 0.31573236 -0.92321187 -0.01570854 -0.01086439 1.31794916]]
r vecs
[[-0.28537416]
[ 0.18506598]
[ 1.07466093]]
t Vecs
[[ -3.84482279]
[-12.7104052 ]
[ 47.74969689]]
>==> Calibration ended
Image Width, Height
1280 720
Region of Interest
(13, 19, 1253, 688)
New Camera Matrix
[[1.16301404e+03 0.00000000e+00 6.27550607e+02]
[0.00000000e+00 1.12108057e+03 3.41597143e+02]
[0.00000000e+00 0.00000000e+00 1.00000000e+00]]
Inverse New Camera Matrix
[[ 8.59834849e-04 0.00000000e+00 -5.39589882e-01]
[ 0.00000000e+00 8.91996552e-04 -3.04703474e-01]
[ 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
Process finished with exit code 0
结果中的 New Camera Matrix 就是我们需要的 camera matrix,同时 camera calibration files 也存储到了 camera_data 文件夹中: 这样,相机初步标定就完成啦,有空会更新标定代码的解读,视觉机械臂有关的博客会随着毕业设计进程更新 这样,相机初步标定就完成啦,有空会更新标定代码的解读,视觉机械臂有关的博客会随着毕业设计进程更新
|