刚体的绕轴转动 转动惯量 |
您所在的位置:网站首页 › omega和alpha百度百科 › 刚体的绕轴转动 转动惯量 |
刚体的绕轴转动 转动惯量
|
(建议阅读最新版本) 预备知识 刚体, 角动量定理 刚体的绕轴转动 若刚体绕固定轴转动, 那么刚体的位置只需一个变量即可完全确定(一个自由度), 我们令该变量为转角 \theta. \theta 关于时间 t 的导数就是刚体绕轴旋转的角速度 \omega. 我们还可以定义角速度 \omega 关于时间的导数(即 \theta 关于时间的二阶导数)为角加速度, 记为 \alpha. 我们可以把刚体的绕轴转动类比质点的直线运动, 把 \theta, \omega 和 \alpha 分别类比为直线运动中的位置 x, 速度 v 和 加速度 a, 因为后三个变量之间的数学关系是完全相同的. 于是我们可以立即得到匀变速转动(即 \alpha 为常数)的一些公式, 如 \begin{gather}\theta = \theta_0 + \omega t + \frac12 \alpha t^2\\ \omega_1^2 - \omega_0^2 = 2\alpha \theta\end{gather} 在以上三个标量的基础上, 我们可以定义它们的矢量形式 \boldsymbol{\mathbf{\theta}}, \boldsymbol{\mathbf{\omega}} 和 \boldsymbol{\mathbf{\alpha}}, 令它们的方向为转轴的方向, 用右手定则 来判断. 要判断刚体上任意一点的速度, 使用式 5 即可(见图 1 ) \begin{align}&\boldsymbol{\mathbf{v}} = \boldsymbol{\mathbf{\omega}} \boldsymbol\times \boldsymbol{\mathbf{r}}&(1)\\\end{align}  图 1:刚体绕轴旋转时任意一点的线速度 图 1:刚体绕轴旋转时任意一点的线速度角动量与转动惯量 设刚体绕固定轴转动, 令轴的方向为 \hat{\boldsymbol{\mathbf{z}}}. 假设轴光滑, 则轴对刚体可施加 x, y 两个方向的力矩,却不能施加 z 方向的力矩. 所以根据角动量定理, 角动量 \boldsymbol{\mathbf{L}} 的 z 分量 L_z 守恒. 我们下面来推导 L_z 与角速度 \omega 的关系. 矢量 \boldsymbol{\mathbf{L}} 与矢量 \boldsymbol{\mathbf{\omega}} 的关系见惯性张量. 对于单个质点,L_z = ( \boldsymbol{\mathbf{r}} \boldsymbol\times \boldsymbol{\mathbf{p}} ) \boldsymbol\cdot \hat{\boldsymbol{\mathbf{z}}}. 首先把质点的位矢在水平方向和竖直方向分解, \boldsymbol{\mathbf{r}} = \boldsymbol{\mathbf{r}} _z + \boldsymbol{\mathbf{r}} _ \bot. 由于 \boldsymbol{\mathbf{p}} 一直沿水平方向, 根据叉乘的几何定义, \boldsymbol{\mathbf{r}} _z \boldsymbol\times \boldsymbol{\mathbf{p}} 也是沿水平方向, 只有 \boldsymbol{\mathbf{r}} _ \bot \boldsymbol\times \boldsymbol{\mathbf{p}} 沿 z 方向.另外, 在圆周运动中, 半径始终与速度垂直, 所以 \boldsymbol{\mathbf{r}} _ \bot 始终与 \boldsymbol{\mathbf{p}} 垂直.得出结论 \begin{align}&L_z = \left\lvert \boldsymbol{\mathbf{r}} _\bot \right\rvert \left\lvert \boldsymbol{\mathbf{p}} \right\rvert = m r_ \bot v = mr_ \bot ^2\omega&(2)\\\end{align} 若把刚体分成无数小块, 每小块的质量分别为 m_i, 离轴的距离 r_{\bot i} = \sqrt{x_i^2 + y_i^2}, 则刚体的角动量 z 分量为 \begin{align}&L_z = \omega \sum_i m_i r_{ \bot i}^2&(3)\\\end{align} 用积分写成 \begin{align}&L_z = \omega \int r_ \bot ^2 \,\mathrm{d}{m} = \omega \int r_ \bot ^2\rho \,\mathrm{d}{V}&(4)\\\end{align} 定义刚体绕固定轴旋转的转动惯量为 \begin{align}&I = \int r_ \bot ^2 \,\mathrm{d}{m}&(5)\\\end{align} (注意角动量的大小不仅取决于刚体的质量分布, 还取决于转轴的位置和方向)则刚体沿轴方向的角动量为 \begin{align}&L_z = I\omega&(6)\\\end{align} 现在来看 “角动量定理” 的式 1 , 注意等号两边是矢量, 所以各个分量必须相等, 我们有 \begin{align}&\frac{\mathrm{d}{L_z}}{\mathrm{d}{t}} = \tau_z&(7)\\\end{align} 将式 8 代入式 9 , 并利用角加速度的定义得 \begin{align}&I\alpha = \tau_z&(8)\\\end{align} 这就是刚体绕轴转动的动力学方程, 其形式可类比牛顿第二定律. 例1 刚体摆 如图 2 , 已知质量为 M 的薄片绕某点的转动惯量为 I, 转轴到刚体质心的长度为 r_c, 转轴和质心的连线与竖直方向夹角为 \theta, 求刚体的运动方程. 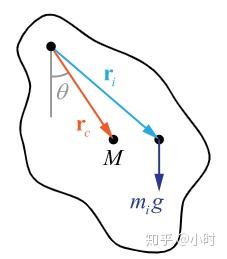 图 2:刚体摆 图 2:刚体摆首先我们把刚体看做质点系, 以转轴为原点计算刚体的合力矩为(由于这是一个平面问题, 力矩必然垂直于该平面) \begin{align}&\begin{aligned} \boldsymbol{\mathbf{\tau}} &= \sum_i \boldsymbol{\mathbf{r}} _i \boldsymbol\times (m_i \boldsymbol{\mathbf{g}} ) = \left(\sum_i m_i \boldsymbol{\mathbf{r}} _i \right) \boldsymbol\times \boldsymbol{\mathbf{g}} = M \boldsymbol{\mathbf{r}} _c \boldsymbol\times \boldsymbol{\mathbf{g}} \\ &= Mg r_c \sin\theta \end{aligned}&(9)\\\end{align} 这就说明, 刚体所受力矩相当于质量为 M, 长度为 r_c 的单摆所受的力矩. 代入式 10 得刚体摆的运动方程为 \begin{align}&I\ddot \theta = Mg r_c \sin\theta&(10)\\\end{align} 可以验证当刚体的质量全部集中在质心时(I = Mr_c^2)我们就得到了单摆的运动方程式 4 . 习题1 陀螺进动的角速度 在 “角动量定理” 的例 2 中, 如果除 r_0, m, g 外, 还知道陀螺的转动惯量为 I 和陀螺的角速度 \omega, 试证明陀螺进动的角速度为 \begin{align}&\Omega = \frac{mgr_0}{I\omega}&(11)\\\end{align} 注意进动角速度与陀螺倾角 \theta 无关.
|
【本文地址】
今日新闻 |
推荐新闻 |