【精选】【STM32】STM32 移植鸿蒙操作系统 |
您所在的位置:网站首页 › nove3鸿蒙智联 › 【精选】【STM32】STM32 移植鸿蒙操作系统 |
【精选】【STM32】STM32 移植鸿蒙操作系统
|
前言
随着 OpenHarmony3.1 的正式发布,其功能也在不断完善。OpenHarmony LiteOS-M 内核是面向IoT领域构建的轻量级物联网操作系统内核,具有小体积、低功耗、高性能的特点,其代码结构简单,主要包括内核最小功能集、内核抽象层、可选组件以及工程目录等,分为硬件相关层以及硬件无关层,硬件相关层提供统一的HAL(Hardware Abstraction Layer)接口,提升硬件易适配性,不同编译工具链和芯片架构的组合分类,满足AIoT类型丰富的硬件和编译工具链的拓展。本文主要介绍如何在STM32上移植 OpenHarmony LiteOS-M 内核,及其注意事项。 一、开发环境硬件: - STM32F429I-DISC1 开发板
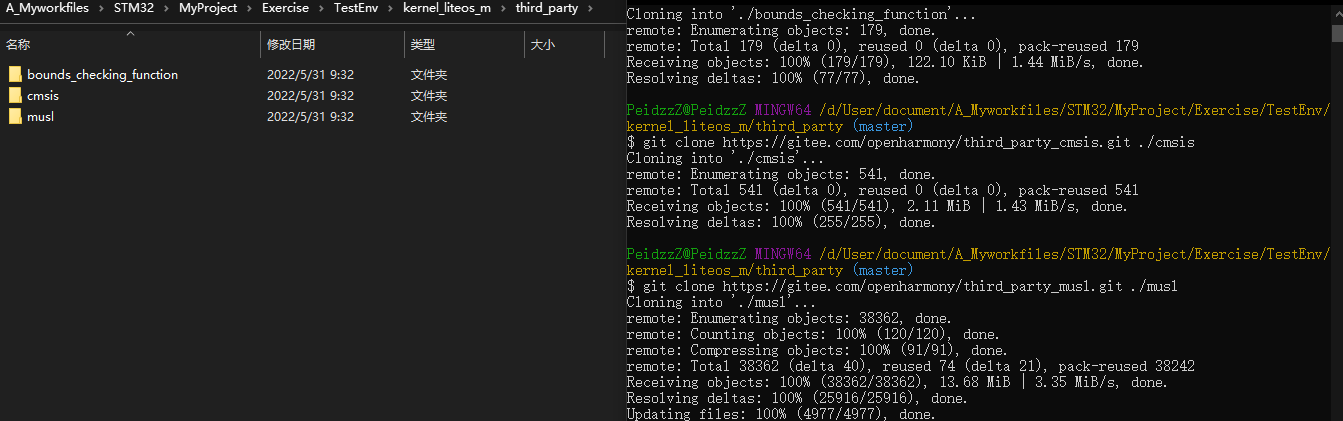
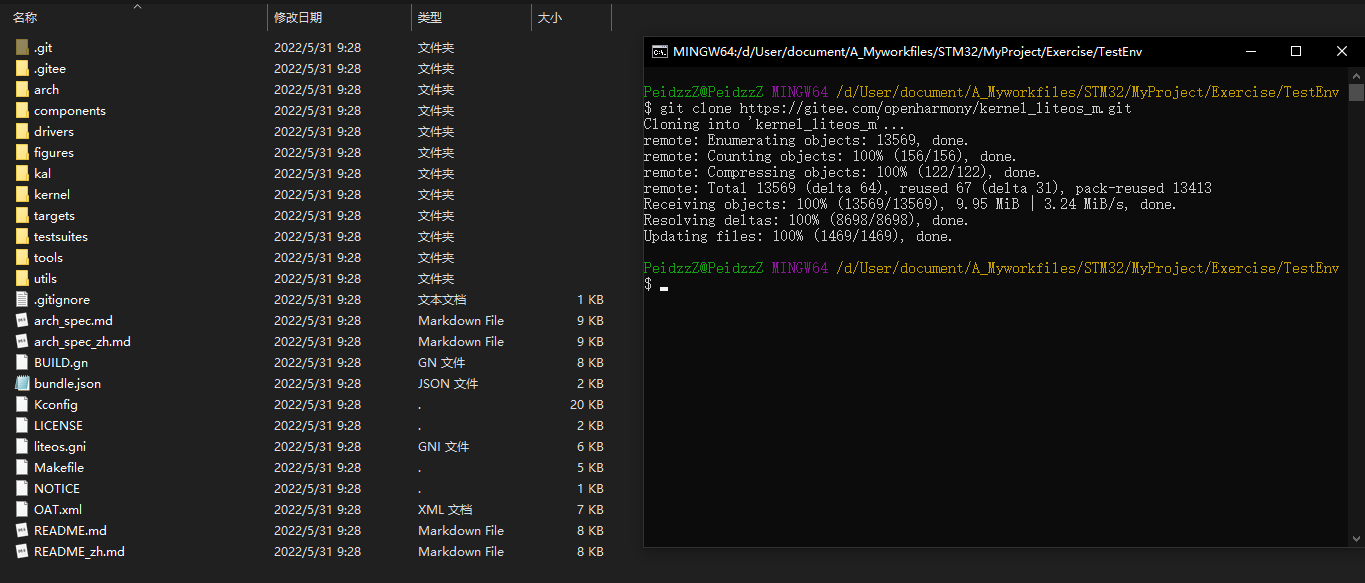 创建 /third_party 目录,用于存放第三方依赖文件(STM32 所需的 CMSIS 等),拉取第三方依赖文件。
cd kernel_liteos_m
mkdir ./third_party
cd third_party
git clone https://gitee.com/openharmony/third_party_bounds_checking_function.git ./bounds_checking_function
git clone https://gitee.com/openharmony/third_party_cmsis.git ./cmsis
git clone https://gitee.com/openharmony/third_party_musl.git ./musl 创建 /third_party 目录,用于存放第三方依赖文件(STM32 所需的 CMSIS 等),拉取第三方依赖文件。
cd kernel_liteos_m
mkdir ./third_party
cd third_party
git clone https://gitee.com/openharmony/third_party_bounds_checking_function.git ./bounds_checking_function
git clone https://gitee.com/openharmony/third_party_cmsis.git ./cmsis
git clone https://gitee.com/openharmony/third_party_musl.git ./musl
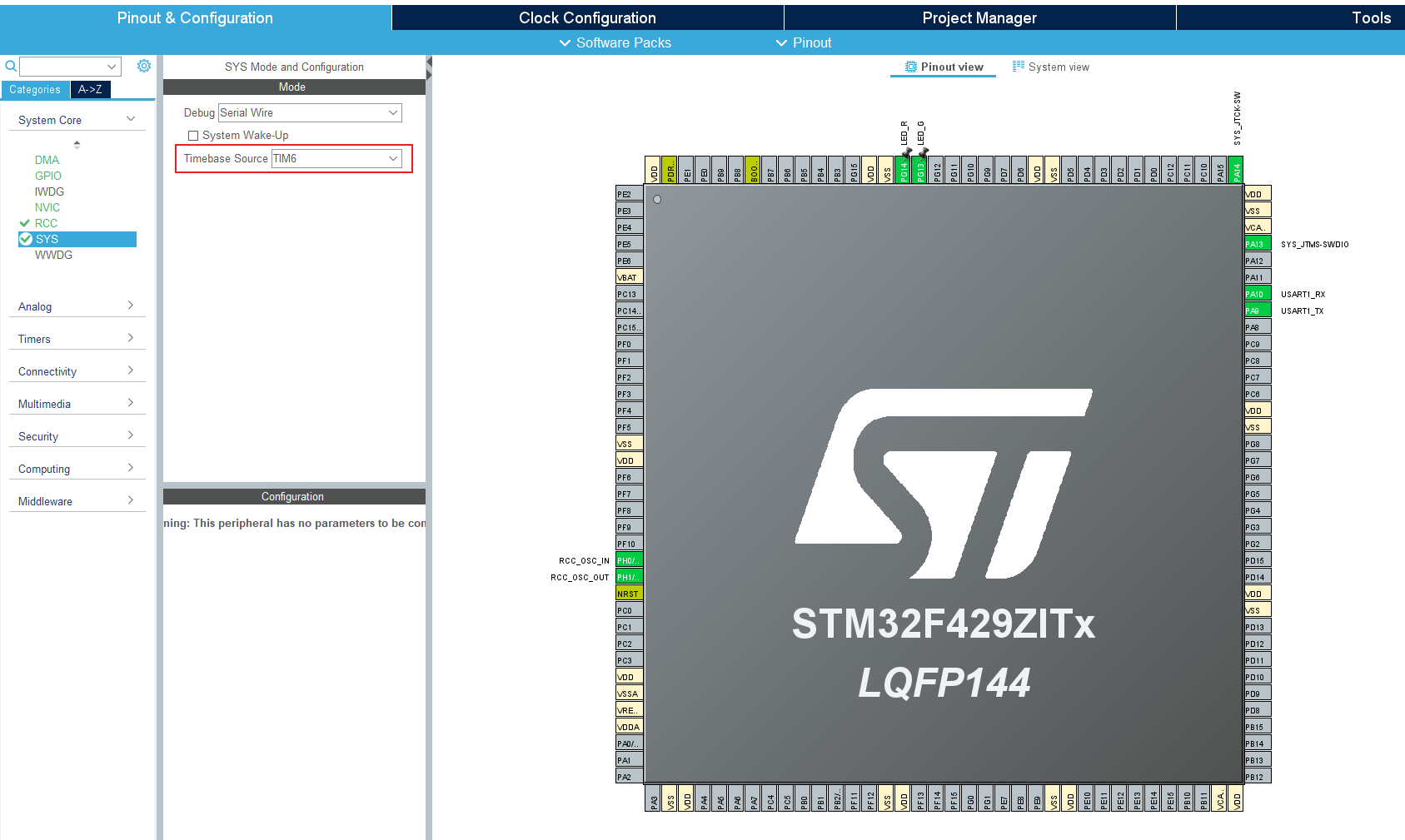
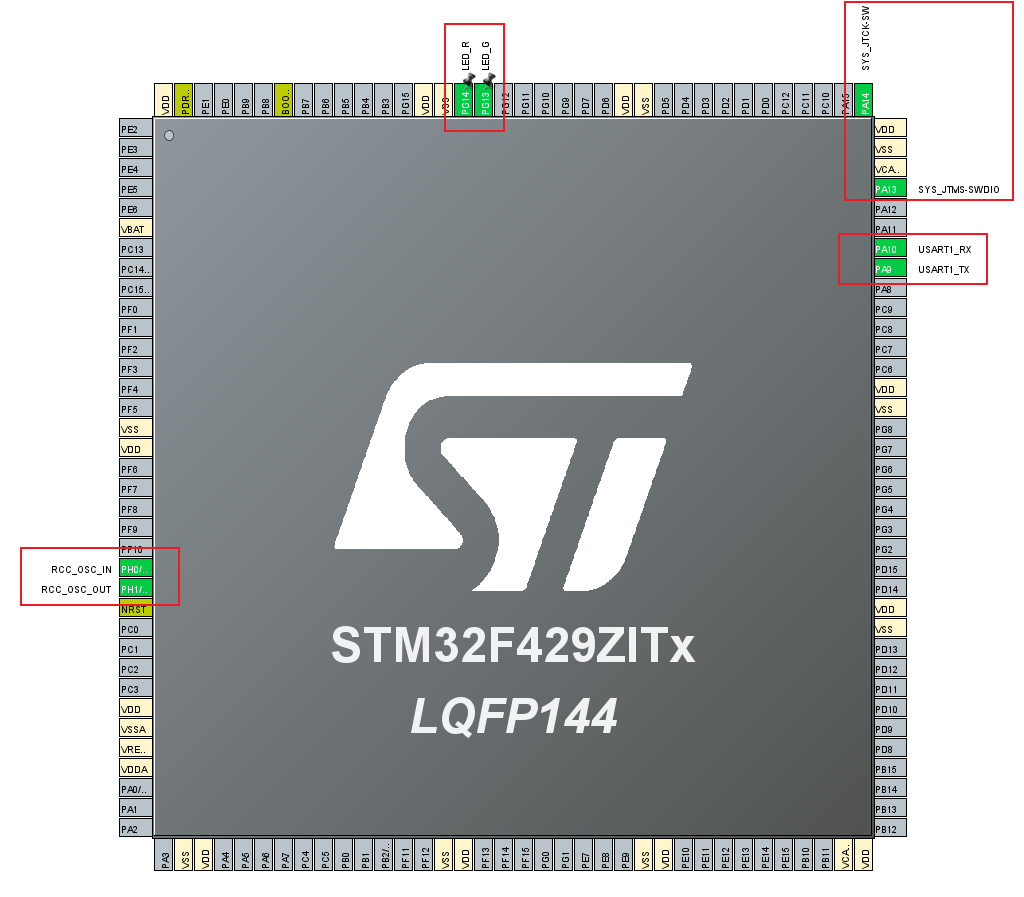
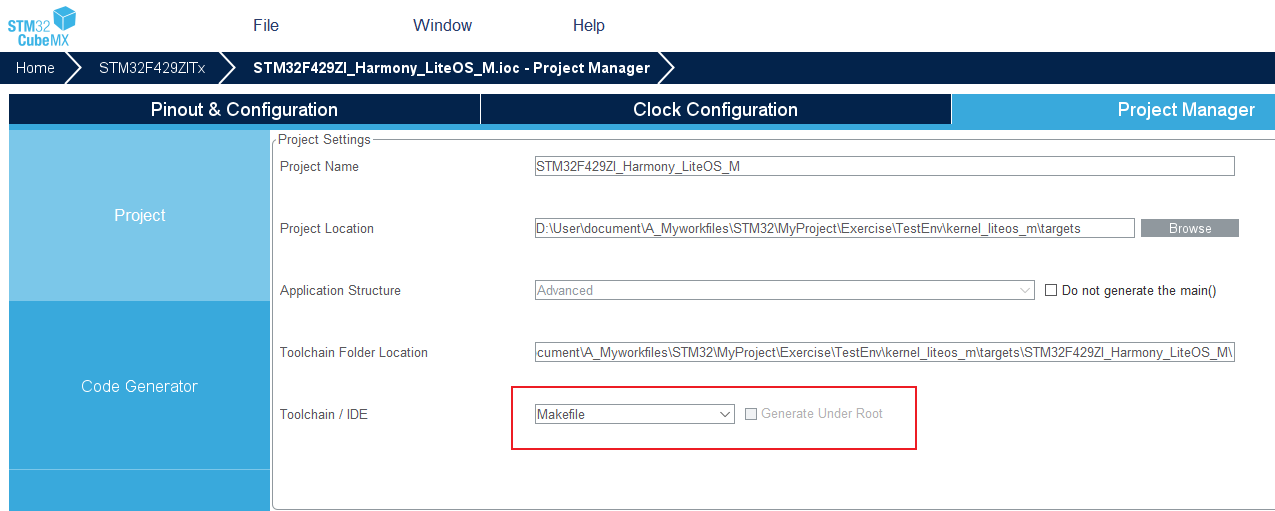
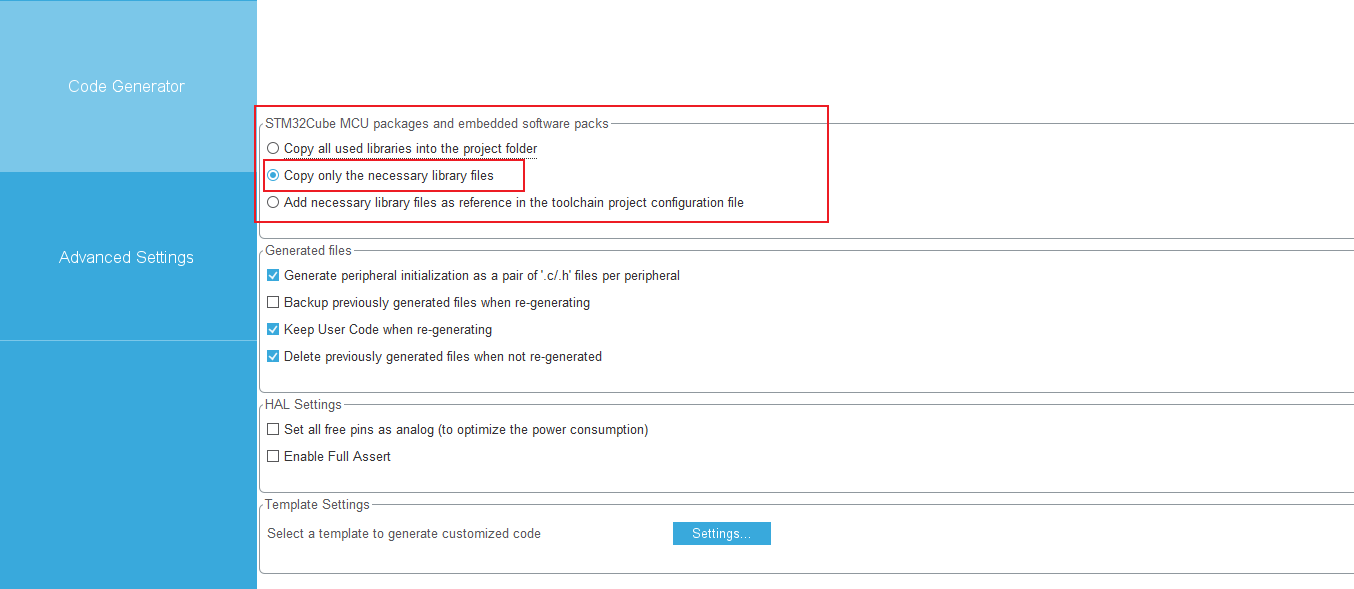
进入/targets 目录,使用 STM32CubeMX 生成工程 STM32F429ZI_Harmony_LiteOS_M 与FreeRTOS类似,由于LiteOS会占用SysTick定时器,因此需要修改HAL库延时的基础时钟,改为其他非SysTick的定时器,避免HAL库延时的定时器和系统运行的定时器冲突。 配置:下载调试端口SW、串口USART、LED_GPIO、时钟树。 开发环境选择 Makefile Code Generator 中一定要选择 Copy only necessary library files ! 如果选择所有库文件都添加的话,那么就会生成很多模板文件。由于我们需要在 Makefile 中添加文件,如果目录中有模板文件的话,我们就无法直接使用筛选功能将所有源文件快速添加到工程中了。 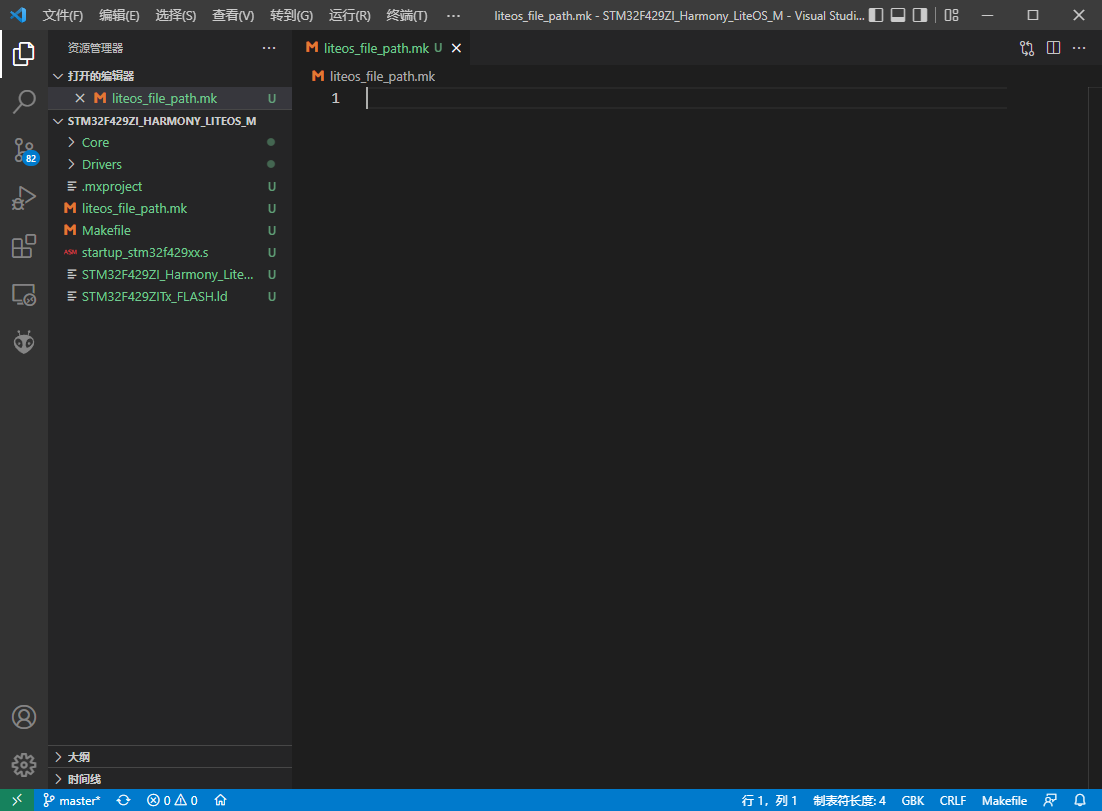 添加内核源文件目录到 liteos_file_path.mk 中。
# Topdir 顶层目录
LITEOSTOPDIR := ../../
LITEOSTOPDIR := $(realpath $(LITEOSTOPDIR))
# Common 内核源文件及头文件目录
C_SOURCES += \
$(wildcard $(LITEOSTOPDIR)/kernel/src/*.c) \
$(wildcard $(LITEOSTOPDIR)/kernel/src/mm/*.c) \
$(wildcard $(LITEOSTOPDIR)/components/cpup/*.c) \
$(wildcard $(LITEOSTOPDIR)/components/power/*.c) \
$(wildcard $(LITEOSTOPDIR)/components/backtrace/*.c) \
$(wildcard $(LITEOSTOPDIR)/components/exchook/*.c) \
$(wildcard $(LITEOSTOPDIR)/components/signal/*.c) \
$(wildcard $(LITEOSTOPDIR)/utils/*.c)
C_INCLUDES += \
-I$(LITEOSTOPDIR)/utils \
-I$(LITEOSTOPDIR)/kernel/include \
-I$(LITEOSTOPDIR)/components/cpup \
-I$(LITEOSTOPDIR)/components/power \
-I$(LITEOSTOPDIR)/components/backtrace \
-I$(LITEOSTOPDIR)/components/exchook \
-I$(LITEOSTOPDIR)/components/signal
# Third party related 第三方依赖文件及头文件目录
C_SOURCES += \
$(wildcard $(LITEOSTOPDIR)/third_party/bounds_checking_function/src/*.c)\
$(wildcard $(LITEOSTOPDIR)/kal/cmsis/*.c)\
$(wildcard $(LITEOSTOPDIR)/kal/posix/src/*.c)
C_INCLUDES += \
-I$(LITEOSTOPDIR)/third_party/bounds_checking_function/include \
-I$(LITEOSTOPDIR)/third_party/bounds_checking_function/src\
-I$(LITEOSTOPDIR)/third_party/cmsis/CMSIS/RTOS2/Include \
-I$(LITEOSTOPDIR)/third_party/musl/porting/liteos_m/kernel/include\
-I$(LITEOSTOPDIR)/kal/cmsis \
-I$(LITEOSTOPDIR)/kal/posix/include \
-I$(LITEOSTOPDIR)/kal/posix/musl_src/internal
# Arch related
ASM_SOURCES += $(wildcard $(LITEOSTOPDIR)/arch/arm/cortex-m4/gcc/*.s)
ASMS_SOURCES += $(wildcard $(LITEOSTOPDIR)/arch/arm/cortex-m4/gcc/*.S)
C_SOURCES += $(wildcard $(LITEOSTOPDIR)/arch/arm/cortex-m4/gcc/*.c)
C_INCLUDES += -I. \
-I$(LITEOSTOPDIR)/arch/include \
-I$(LITEOSTOPDIR)/arch/arm/cortex-m4/gcc
CFLAGS += -nostdinc -nostdlib
ASFLAGS += -imacros $(LITEOSTOPDIR)/kernel/include/los_config.h -DCLZ=CLZ
# list of ASM .S program objects
OBJECTS += $(addprefix $(BUILD_DIR)/,$(notdir $(ASMS_SOURCES:.S=.o)))
vpath %.S $(sort $(dir $(ASMS_SOURCES)))
$(BUILD_DIR)/%.o: %.S Makefile | $(BUILD_DIR)
$(CC) -c $(CFLAGS) $(ASFLAGS) $< -o $@ 添加内核源文件目录到 liteos_file_path.mk 中。
# Topdir 顶层目录
LITEOSTOPDIR := ../../
LITEOSTOPDIR := $(realpath $(LITEOSTOPDIR))
# Common 内核源文件及头文件目录
C_SOURCES += \
$(wildcard $(LITEOSTOPDIR)/kernel/src/*.c) \
$(wildcard $(LITEOSTOPDIR)/kernel/src/mm/*.c) \
$(wildcard $(LITEOSTOPDIR)/components/cpup/*.c) \
$(wildcard $(LITEOSTOPDIR)/components/power/*.c) \
$(wildcard $(LITEOSTOPDIR)/components/backtrace/*.c) \
$(wildcard $(LITEOSTOPDIR)/components/exchook/*.c) \
$(wildcard $(LITEOSTOPDIR)/components/signal/*.c) \
$(wildcard $(LITEOSTOPDIR)/utils/*.c)
C_INCLUDES += \
-I$(LITEOSTOPDIR)/utils \
-I$(LITEOSTOPDIR)/kernel/include \
-I$(LITEOSTOPDIR)/components/cpup \
-I$(LITEOSTOPDIR)/components/power \
-I$(LITEOSTOPDIR)/components/backtrace \
-I$(LITEOSTOPDIR)/components/exchook \
-I$(LITEOSTOPDIR)/components/signal
# Third party related 第三方依赖文件及头文件目录
C_SOURCES += \
$(wildcard $(LITEOSTOPDIR)/third_party/bounds_checking_function/src/*.c)\
$(wildcard $(LITEOSTOPDIR)/kal/cmsis/*.c)\
$(wildcard $(LITEOSTOPDIR)/kal/posix/src/*.c)
C_INCLUDES += \
-I$(LITEOSTOPDIR)/third_party/bounds_checking_function/include \
-I$(LITEOSTOPDIR)/third_party/bounds_checking_function/src\
-I$(LITEOSTOPDIR)/third_party/cmsis/CMSIS/RTOS2/Include \
-I$(LITEOSTOPDIR)/third_party/musl/porting/liteos_m/kernel/include\
-I$(LITEOSTOPDIR)/kal/cmsis \
-I$(LITEOSTOPDIR)/kal/posix/include \
-I$(LITEOSTOPDIR)/kal/posix/musl_src/internal
# Arch related
ASM_SOURCES += $(wildcard $(LITEOSTOPDIR)/arch/arm/cortex-m4/gcc/*.s)
ASMS_SOURCES += $(wildcard $(LITEOSTOPDIR)/arch/arm/cortex-m4/gcc/*.S)
C_SOURCES += $(wildcard $(LITEOSTOPDIR)/arch/arm/cortex-m4/gcc/*.c)
C_INCLUDES += -I. \
-I$(LITEOSTOPDIR)/arch/include \
-I$(LITEOSTOPDIR)/arch/arm/cortex-m4/gcc
CFLAGS += -nostdinc -nostdlib
ASFLAGS += -imacros $(LITEOSTOPDIR)/kernel/include/los_config.h -DCLZ=CLZ
# list of ASM .S program objects
OBJECTS += $(addprefix $(BUILD_DIR)/,$(notdir $(ASMS_SOURCES:.S=.o)))
vpath %.S $(sort $(dir $(ASMS_SOURCES)))
$(BUILD_DIR)/%.o: %.S Makefile | $(BUILD_DIR)
$(CC) -c $(CFLAGS) $(ASFLAGS) $< -o $@
这里注意:最后一行前面的缩进必须为tab,而不是空格。否则编译会报错。 修改项目Makefile 在Makefile中包含liteos_file_path.mk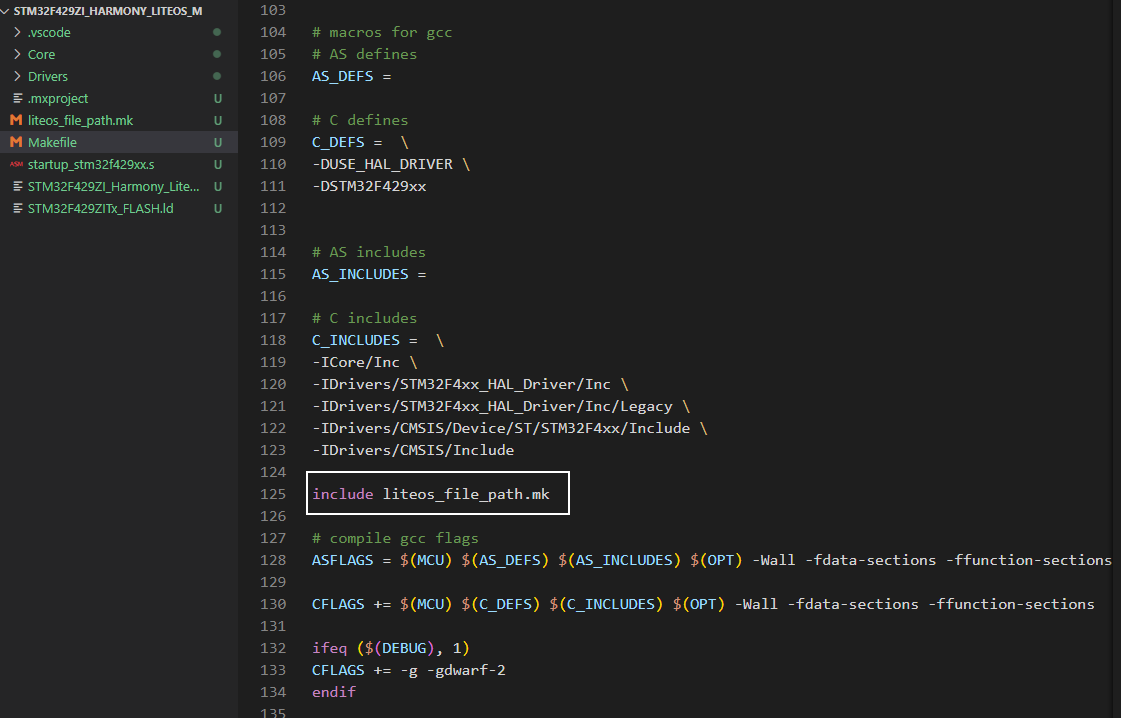 增加*.S文件的编译规则
# list of ASM .S program objects
OBJECTS += $(addprefix $(BUILD_DIR)/,$(notdir $(ASMS_SOURCES:.S=.o)))
vpath %.S $(sort $(dir $(ASMS_SOURCES)))
$(BUILD_DIR)/%.o: %.S Makefile | $(BUILD_DIR)
$(CC) -c $(CFLAGS) $(ASFLAGS) $< -o $@ 增加*.S文件的编译规则
# list of ASM .S program objects
OBJECTS += $(addprefix $(BUILD_DIR)/,$(notdir $(ASMS_SOURCES:.S=.o)))
vpath %.S $(sort $(dir $(ASMS_SOURCES)))
$(BUILD_DIR)/%.o: %.S Makefile | $(BUILD_DIR)
$(CC) -c $(CFLAGS) $(ASFLAGS) $< -o $@
 修改中断服务函数 Core\Src\stm32f4xx_it.c
添加 LiteOS 头文件在PendSV异常中进入LiteOS HalPendSV 异常处理函数,进行任务切换操作在SysTick中断服务函数添加OsTickHandler函数,为系统提供时间基准
#include "los_arch_context.h"
#include "los_tick.h"
/*
.........
*/
void PendSV_Handler(void)
{
/* USER CODE BEGIN PendSV_IRQn 0 */
HalPendSV();
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
}
/*
.........
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
OsTickHandler();
/* USER CODE END SysTick_IRQn 0 */
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
/*
.........
*/
修改串口映射 Core\Src\main.c
包含头文件#include "stdio.h"修改串口映射以支持printf
/* USER CODE BEGIN 0 */
#if 1
int _write(int fd, char *ptr, int len)
{
osStatus_t result;
osKernelState_t state;
if (osKernelGetState() == osKernelInactive)
{
//系统未启动时不使用DMA
HAL_UART_Transmit(&huart1, ptr, len, 0xFFFF);
return len;
}
else
{
//获取信号,如果上一个DMA传输完成
//信号就能获取到,没有传输完成任务就挂起
//等到传输完成再恢复
result = osSemaphoreAcquire(UART1_TX_DMA_SemaphoreHandle, 0xFFFF);
if (result == osOK)
{
HAL_UART_Transmit_DMA(&huart1, ptr, len); //获取成功,发送数据
return len;
}
else
{
return -1; //获取失败
}
}
}
#endif
// DMA 传输完成后会调用传输完成回调函数,在该函数中我们释放信号
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == huart1.Instance)
osSemaphoreRelease(UART1_TX_DMA_SemaphoreHandle);
}
/* USER CODE END 0 */
添加测试任务 Core\Src\main.c
包含os头文件#include "cmsis_os.h"增加测试任务
/*
.........
*/
#include "cmsis_os.h"
/*
.........
*/
/* USER CODE BEGIN PV */
osSemaphoreId_t UART1_TX_DMA_SemaphoreHandle;
const osSemaphoreAttr_t UART1_TX_DMA_Semaphore_attributes = {
.name = "UART1_TX_DMA_Semaphore",
};
osThreadId_t uart_taskHandle;
const osThreadAttr_t uart_task_attributes = {
.name = "uart_task",
.stack_size = 512 * 2,
.priority = (osPriority_t)osPriorityNormal3,
};
/* USER CODE END PV */
/*
.........
*/
/* USER CODE BEGIN 0 */
/*
.........
*/
void Uart_Task(void *argument)
{
HAL_GPIO_WritePin(LED_G_GPIO_Port, LED_G_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(LED_R_GPIO_Port, LED_R_Pin, GPIO_PIN_RESET);
while (1)
{
HAL_GPIO_TogglePin(LED_G_GPIO_Port, LED_G_Pin);
HAL_GPIO_TogglePin(LED_R_GPIO_Port, LED_R_Pin);
printf("System Runing!!!\r\n");
osDelay(1000);
}
}
/* USER CODE END 0 */
/*
.........
*/
int main(){
/*
.........
*/
/* USER CODE BEGIN 2 */
osKernelInitialize();
printf("System Init!\r\n");
UART1_TX_DMA_SemaphoreHandle = osSemaphoreNew(1, 1, &UART1_TX_DMA_Semaphore_attributes);
uart_taskHandle = osThreadNew(Uart_Task, NULL, &uart_task_attributes);
osKernelStart();
/* USER CODE END 2 */
/*
.........
*/
}
5. 编译下载
使用make命令编译工程,这里的-j12表示使用多线程编译,可以提高速度,12表示电脑核心数。
make -j12
修改中断服务函数 Core\Src\stm32f4xx_it.c
添加 LiteOS 头文件在PendSV异常中进入LiteOS HalPendSV 异常处理函数,进行任务切换操作在SysTick中断服务函数添加OsTickHandler函数,为系统提供时间基准
#include "los_arch_context.h"
#include "los_tick.h"
/*
.........
*/
void PendSV_Handler(void)
{
/* USER CODE BEGIN PendSV_IRQn 0 */
HalPendSV();
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
}
/*
.........
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
OsTickHandler();
/* USER CODE END SysTick_IRQn 0 */
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
/*
.........
*/
修改串口映射 Core\Src\main.c
包含头文件#include "stdio.h"修改串口映射以支持printf
/* USER CODE BEGIN 0 */
#if 1
int _write(int fd, char *ptr, int len)
{
osStatus_t result;
osKernelState_t state;
if (osKernelGetState() == osKernelInactive)
{
//系统未启动时不使用DMA
HAL_UART_Transmit(&huart1, ptr, len, 0xFFFF);
return len;
}
else
{
//获取信号,如果上一个DMA传输完成
//信号就能获取到,没有传输完成任务就挂起
//等到传输完成再恢复
result = osSemaphoreAcquire(UART1_TX_DMA_SemaphoreHandle, 0xFFFF);
if (result == osOK)
{
HAL_UART_Transmit_DMA(&huart1, ptr, len); //获取成功,发送数据
return len;
}
else
{
return -1; //获取失败
}
}
}
#endif
// DMA 传输完成后会调用传输完成回调函数,在该函数中我们释放信号
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == huart1.Instance)
osSemaphoreRelease(UART1_TX_DMA_SemaphoreHandle);
}
/* USER CODE END 0 */
添加测试任务 Core\Src\main.c
包含os头文件#include "cmsis_os.h"增加测试任务
/*
.........
*/
#include "cmsis_os.h"
/*
.........
*/
/* USER CODE BEGIN PV */
osSemaphoreId_t UART1_TX_DMA_SemaphoreHandle;
const osSemaphoreAttr_t UART1_TX_DMA_Semaphore_attributes = {
.name = "UART1_TX_DMA_Semaphore",
};
osThreadId_t uart_taskHandle;
const osThreadAttr_t uart_task_attributes = {
.name = "uart_task",
.stack_size = 512 * 2,
.priority = (osPriority_t)osPriorityNormal3,
};
/* USER CODE END PV */
/*
.........
*/
/* USER CODE BEGIN 0 */
/*
.........
*/
void Uart_Task(void *argument)
{
HAL_GPIO_WritePin(LED_G_GPIO_Port, LED_G_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(LED_R_GPIO_Port, LED_R_Pin, GPIO_PIN_RESET);
while (1)
{
HAL_GPIO_TogglePin(LED_G_GPIO_Port, LED_G_Pin);
HAL_GPIO_TogglePin(LED_R_GPIO_Port, LED_R_Pin);
printf("System Runing!!!\r\n");
osDelay(1000);
}
}
/* USER CODE END 0 */
/*
.........
*/
int main(){
/*
.........
*/
/* USER CODE BEGIN 2 */
osKernelInitialize();
printf("System Init!\r\n");
UART1_TX_DMA_SemaphoreHandle = osSemaphoreNew(1, 1, &UART1_TX_DMA_Semaphore_attributes);
uart_taskHandle = osThreadNew(Uart_Task, NULL, &uart_task_attributes);
osKernelStart();
/* USER CODE END 2 */
/*
.........
*/
}
5. 编译下载
使用make命令编译工程,这里的-j12表示使用多线程编译,可以提高速度,12表示电脑核心数。
make -j12
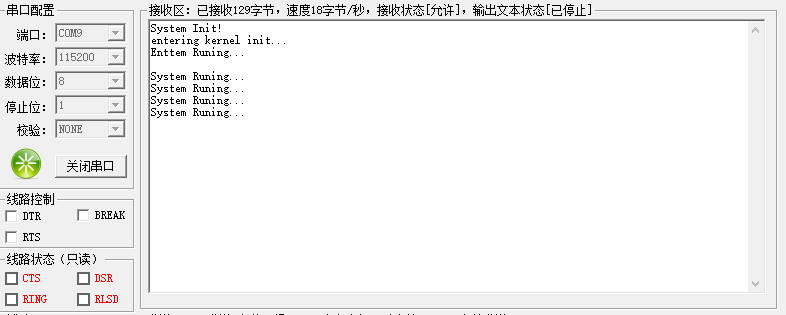
LED 交替闪烁 串口输出信息 总的来说,移植的难点还是在于对 Makefile 相关工具链的理解与应用。由于有CMSIS_OS的封装,轻度使用时,与FreeRTOS感受相差不大。对新手来说使用FreeRTOS进行入门还是不错的选择,建议基本了解 FreeRTOS 之后再深入学习 LiteOS-M 并掌握二者之间的差别。 |
 软件: - VSCode:用于编辑代码 - STM32CubeMX:用于生成工程 - make、arm-none-eabi-gcc:用于编译工程 - STM32Cubeprogrammer:用于下载工程 - Git:用于获取 OpenHarmony LiteOS-M 内核源码
软件: - VSCode:用于编辑代码 - STM32CubeMX:用于生成工程 - make、arm-none-eabi-gcc:用于编译工程 - STM32Cubeprogrammer:用于下载工程 - Git:用于获取 OpenHarmony LiteOS-M 内核源码
 到这里 OpenHarmony LiteOS-M 内核源码就获取完毕了。
到这里 OpenHarmony LiteOS-M 内核源码就获取完毕了。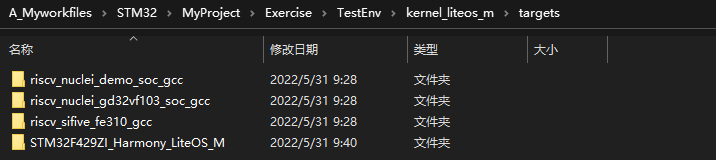
 至此工程配置已结束,点击 Generate 即可生成工程。
至此工程配置已结束,点击 Generate 即可生成工程。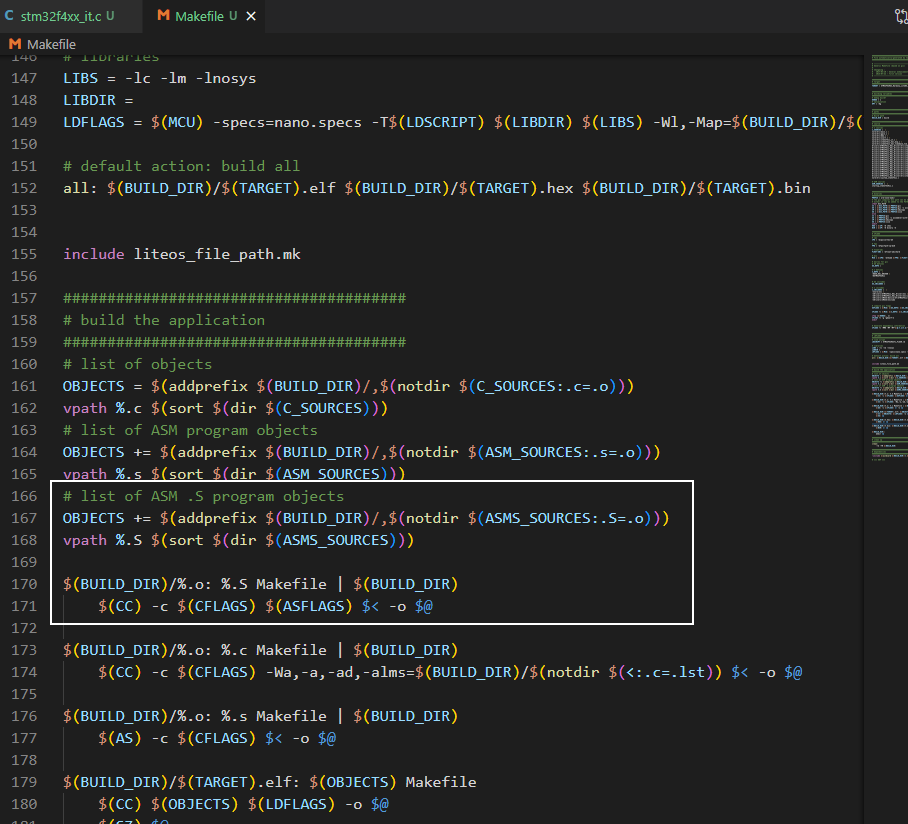
 2. 使用STM32Cubeprogrammer下载位于/build中的固件STM32F429ZI_Harmony_LiteOS_M.hex
2. 使用STM32Cubeprogrammer下载位于/build中的固件STM32F429ZI_Harmony_LiteOS_M.hex 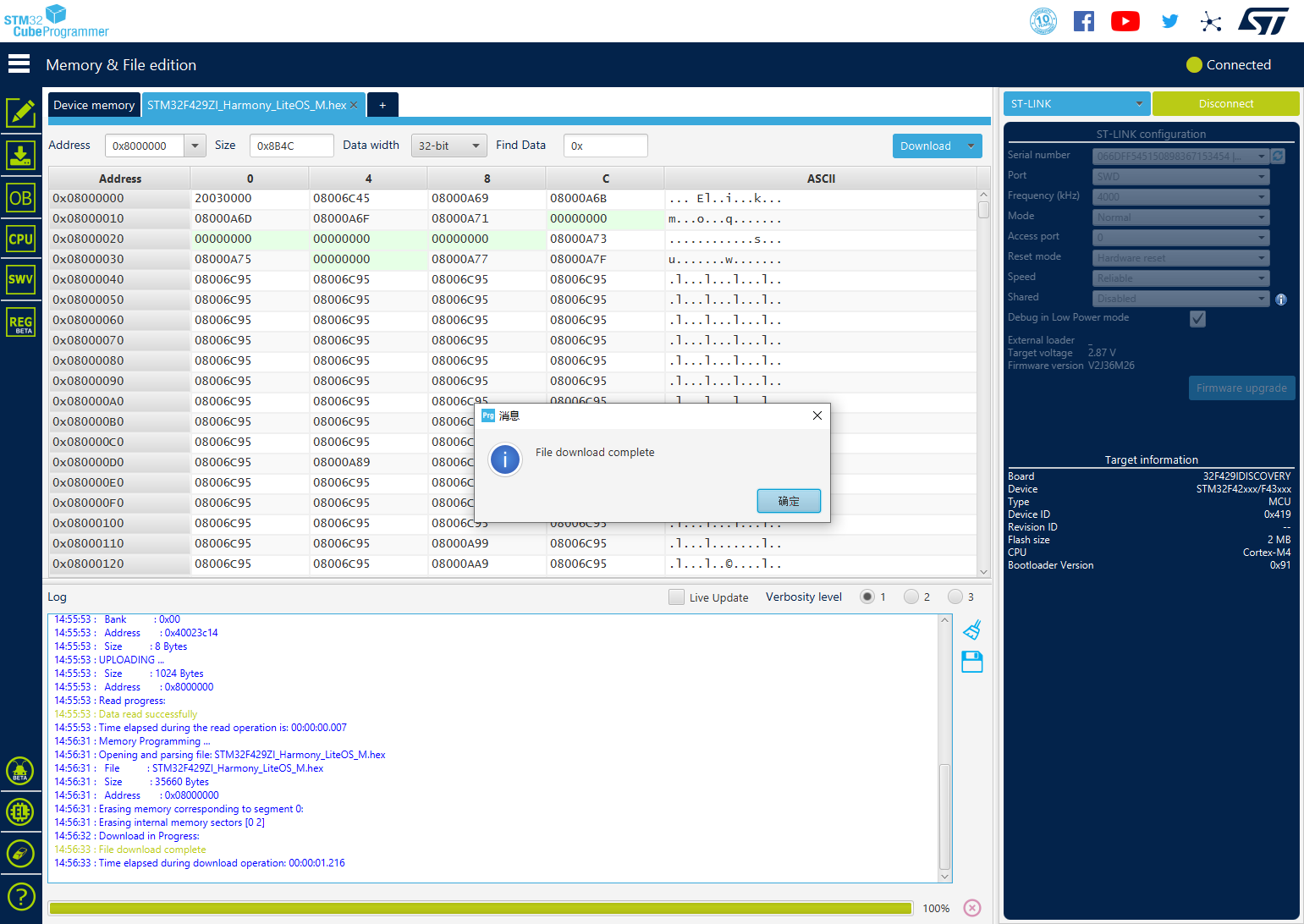 3. 观察到LED交替闪烁,串口助手打印出了调试信息。
3. 观察到LED交替闪烁,串口助手打印出了调试信息。
【本文地址】