STM32笔记 |
您所在的位置:网站首页 › mpu6050平衡车程序 › STM32笔记 |
STM32笔记
|
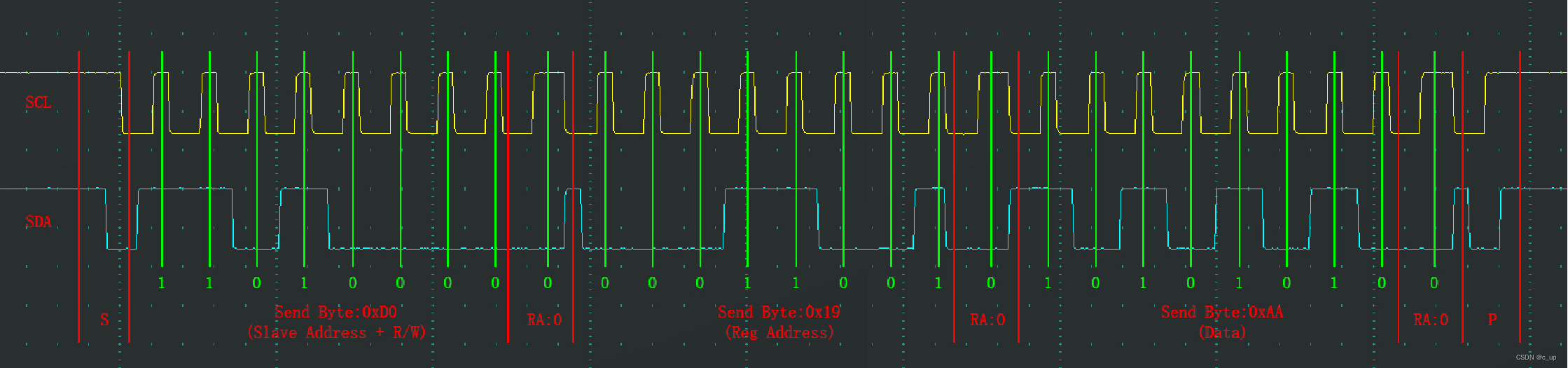
目录 一、I2C时序 1.1 指定地址写数据 1.2 指定地址读数据 二、MPU6050简介 2.1 MPU6050的参数 2.2 MPU6050的硬件电路 2.3 MPU6050框图 一、I2C时序在学习51单片机时,已经接触过I2C基本时序了,简单回顾一下。 I2C的基本时序有: 起始信号、停止信号;接收一个字节、发送一个字节;接收应答、发送应答。程序如下: #include "stm32f10x.h" // Device header #include "Delay.h" /* *函数名 :MyI2C_W_SCL(uint8_t Bitvalue) *函数功能 :主机操作SCL线 *输入 :Bitvalue:高电平还是低电平,范围0或1 *输出 :无 */ void MyI2C_W_SCL(uint8_t Bitvalue) { GPIO_WriteBit(GPIOB,GPIO_Pin_10,(BitAction)Bitvalue); Delay_us(10); } /* *函数名 :MyI2C_R_SDA(void) *函数功能 :读取SDA线上的数据 *输入 :无 *输出 :bit:高电平还是低电平,范围0或1 */ uint8_t MyI2C_R_SDA(void) { uint8_t bit=0; bit=GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_11); Delay_us(10); return bit; } /* *函数名 :MyI2C_W_SDA(uint8_t Bitvalue) *函数功能 :写数据到SDA线上 *输入 :Bitvalue:高电平还是低电平,范围0或1 *输出 :无 */ void MyI2C_W_SDA(uint8_t Bitvalue) { GPIO_WriteBit(GPIOB,GPIO_Pin_11,(BitAction)Bitvalue); Delay_us(10); } /* *函数名 :MyI2C_Init(void) *函数功能 :I2C初始化 *输入 :无 *输出 :无 */ void MyI2C_Init(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;//开漏输出模式 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11; GPIO_Init(GPIOB, &GPIO_InitStructure); } /* *函数名 :MyI2C_Start(void) *函数功能 :I2C起始信号 *输入 :无 *输出 :无 */ void MyI2C_Start(void) { MyI2C_W_SDA(1); MyI2C_W_SCL(1); MyI2C_W_SDA(0); MyI2C_W_SCL(0);//保证每个时序单元操作完后,SCL为低电平 } /* *函数名 :MyI2C_Stop(void) *函数功能 :I2C停止信号 *输入 :无 *输出 :无 */ void MyI2C_Stop(void) { MyI2C_W_SDA(0); MyI2C_W_SCL(1); MyI2C_W_SDA(1); } /* *函数名 :MyI2C_WriteByte(uint8_t Byte) *函数功能 :主机写入一个字节数据 *输入 :Byte:写入的数据 范围:0x00~0xff *输出 :无 */ void MyI2C_WriteByte(uint8_t Byte) { uint8_t i=0; for(i=0;i>i); MyI2C_W_SCL(1); MyI2C_W_SCL(0); } } /* *函数名 :MyI2C_ReadByte(void) *函数功能 :主机读取一个字节数据 *输入 :无 *输出 :Byte:读出的数据 范围:0x00~0xff */ uint8_t MyI2C_ReadByte(void) { uint8_t i,Byte=0; MyI2C_W_SDA(1);//释放总线 for(i=0;i>i;} MyI2C_W_SCL(0); } return Byte; } /* *函数名 :MyI2C_SeedAck(uint8_t Ack) *函数功能 :主机发送应答 *输入 :Ack:应答信号 可以是:0(应答)或1(非应答) *输出 :无 */ void MyI2C_SeedAck(uint8_t Ack) { MyI2C_W_SDA(Ack); MyI2C_W_SCL(1); MyI2C_W_SCL(0); } /* *函数名 :MyI2C_ReciveAck(void) *函数功能 :主机接收应答 *输入 :无 *输出 :Ack:应答信号 可以是:0(应答)或1(非应答) */ uint8_t MyI2C_ReciveAck(void) { uint8_t Ack=0; MyI2C_W_SDA(1); MyI2C_W_SCL(1); Ack=MyI2C_R_SDA(); MyI2C_W_SCL(0); return Ack; } 1.1 指定地址写数据
程序如下: #include "stm32f10x.h" // Device header #include "I2C.h" #include "MPU6050_Reg.h" #define MPU6050_address 0xD0 /* *函数名 :MPU6050_WriteReg(uint8_t regaddress,uint8_t Data) *函数功能 :指定寄存器地址,往MPU6050的寄存器中写入数据 *输入 :regaddress:寄存器的地址 @ref MPU6050_Reg.h Data :写入的数据 *输出 :无 */ void MPU6050_WriteReg(uint8_t regaddress,uint8_t Data) { MyI2C_Start(); MyI2C_WriteByte(MPU6050_address); MyI2C_ReciveAck(); MyI2C_WriteByte(regaddress); MyI2C_ReciveAck(); MyI2C_WriteByte(Data); MyI2C_ReciveAck(); MyI2C_Stop(); } /* *函数名 :MPU6050_Init(void) *函数功能 :MPU6050初始化 *输入 :无 *输出 :无 */ void MPU6050_Init(void) { MyI2C_Init(); MPU6050_WriteReg(MPU6050_PWR_MGMT_1,0x01); MPU6050_WriteReg(MPU6050_PWR_MGMT_2,0x00); MPU6050_WriteReg(MPU6050_SMPLRT_DIV,0x09); MPU6050_WriteReg(MPU6050_CONFIG,0x06); MPU6050_WriteReg(MPU6050_GYRO_CONFIG,0x18); MPU6050_WriteReg(MPU6050_ACCEL_CONFIG,0x18); } /* *函数名 :MPU6050_ReadReg(uint8_t regaddress) *函数功能 :指定寄存器地址,读取MPU6050寄存器中的数据 *输入 :regaddress:寄存器的地址 @ref MPU6050_Reg.h *输出 :Data:读取的数据 */ uint8_t MPU6050_ReadReg(uint8_t regaddress) { uint8_t Data=0; MyI2C_Start(); MyI2C_WriteByte(MPU6050_address); MyI2C_ReciveAck(); MyI2C_WriteByte(regaddress); MyI2C_ReciveAck(); MyI2C_Start(); MyI2C_WriteByte(MPU6050_address+1); MyI2C_ReciveAck(); Data=MyI2C_ReadByte(); MyI2C_SeedAck(1); MyI2C_Stop(); return Data; } /* *函数名 :MPU6050_ReadRegData(uint16_t*Ax,uint16_t*Ay,uint16_t*Az, uint16_t*Gx,uint16_t*Gy,uint16_t*Gz) *函数功能 :连续读取MPU6050寄存器中的数据(数字量) *输入 :Ax:x轴的加速度 0-32768 Ay:y轴的加速度 0-32768 Az:z轴的加速度 0-32768 Gx:x轴的角速度 0-32768 Gy:y轴的角速度 0-32768 Gz:z轴的角速度 0-32768 *输出 :无 */ void MPU6050_ReadRegData(uint16_t*Ax,uint16_t*Ay,uint16_t*Az, uint16_t*Gx,uint16_t*Gy,uint16_t*Gz) { int16_t Data_H,Data_L=0; MyI2C_Start(); MyI2C_WriteByte(MPU6050_address); MyI2C_ReciveAck(); MyI2C_WriteByte(MPU6050_ACCEL_XOUT_H); MyI2C_ReciveAck(); MyI2C_Start(); MyI2C_WriteByte(MPU6050_address+1); MyI2C_ReciveAck(); Data_H=MyI2C_ReadByte(); MyI2C_SeedAck(0); Data_L=MyI2C_ReadByte(); MyI2C_SeedAck(0); *Ax=Data_H |

【本文地址】
今日新闻 |
推荐新闻 |