使用IIC去驱动MPU6050时为什么总读取失败 |
您所在的位置:网站首页 › mpu6050和adxl345区别 › 使用IIC去驱动MPU6050时为什么总读取失败 |
使用IIC去驱动MPU6050时为什么总读取失败
|
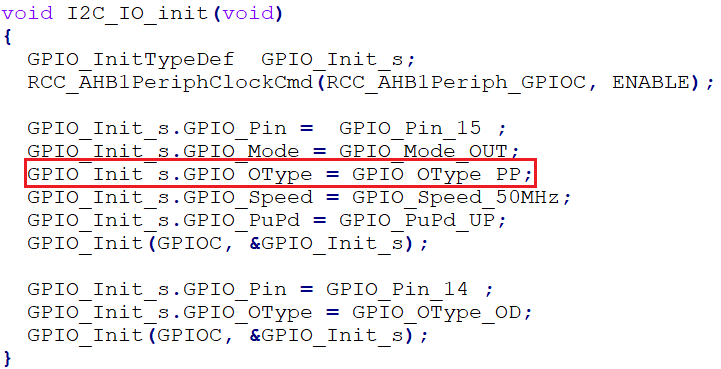
01概述 在之前的文章中《I2C基础原理及协议》中详细讲解了IIC协议,并且使用是NXP的官方手册,demo示例使用IIC读取RTC芯片,运行正常,没有任何问题。并且更新了《IIC踩过的坑》,讲述了在使用IIC读取RTC芯片时遇到的问题,并成功解决。 我以为我已经完全学会了IIC,但现实却打了脸,我在使用《STM32IIC详解》文中的IIC驱动,去驱动MPU6050时,总是读取失败。这个驱动明明是验证过的,为什么会有问题。让我一度很是郁闷。 02问题 不卖关子,直接说问题,是我之前的IIC驱动有问题。 问题1: 错误将CLK信号GPIO设置为推挽输出。应该设置为开漏输出。
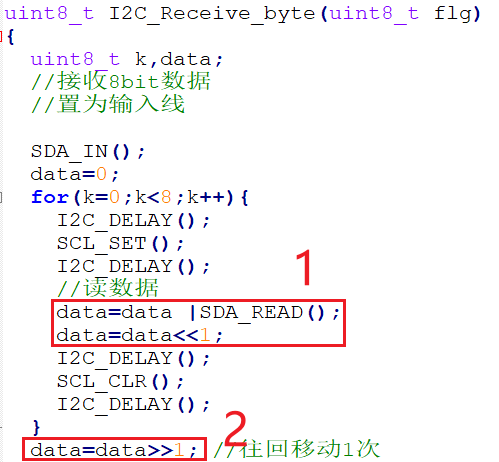
问题2: 读取函数有bug。1处应该先左移再读取SDA的数据,然后删除2处的数据。
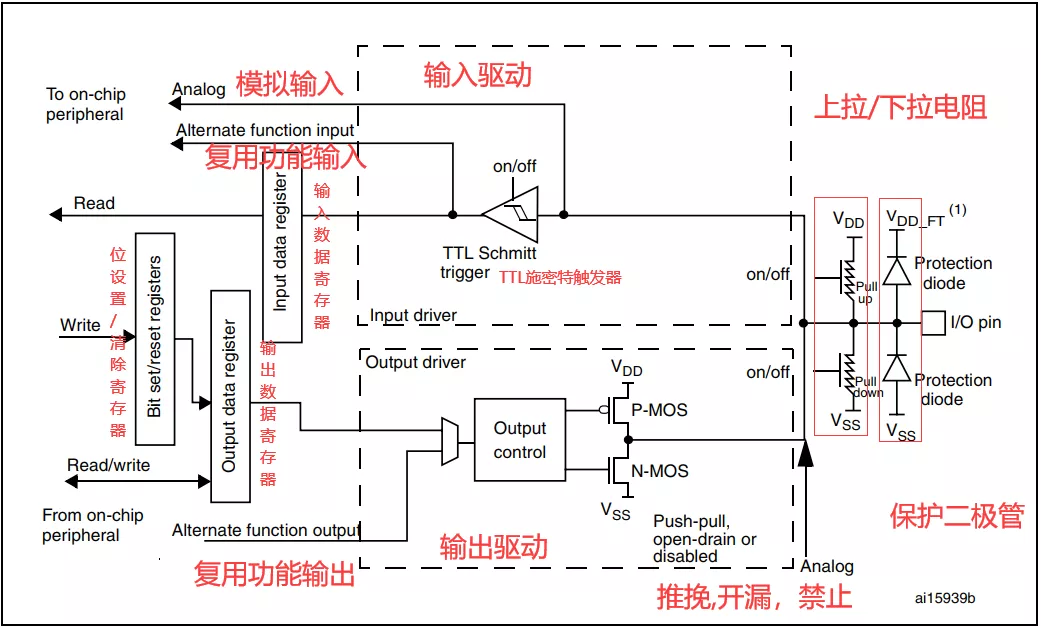
问题2:这个就是纯粹的bug了,大家应该看出来了。在RTC的驱动没有触发bug的原因是:在RTC的IIC接收数据中,实际应用中最高位为0,触发不了这个bug。而在MPU6050的IIC接收数据中就触发了这个bug。我也在感慨,有时候不是程序没有bug,而是可能没有触发。 问题1:这个问题,其实很简单,IIC协议中也提到过,很多大神也知道需要将MCU的IIC引脚设置为开漏输出。这一方面我也了解,但是没有在意,因为一直读取RTC一直“没有bug”。接下来我将细细和大家分享一下IIC为什么需要开漏输出,开漏输出和推挽输出有什么区别。精通的大佬可以出门左转了,想了解一下的同学欢迎继续往下看。 03开漏输出 STM32F207的GPIO框图如下
普通输入模式下,上拉和下拉电阻(微弱)的存在。主要是由于P-MOS和N-MOS的存在分为下列两种模式 开漏模式:输出寄存器是 0 时,激活 N-MOS,而输出寄存器是 1 时,端口保持高阻态(P-MOS 不会被使能) 推挽输出:输出寄存器是 0 时,激活 N-MOS,而输出寄存器是 1 时,激活 P-MOS。 上面是我的在文章《STM32 GPIO详解》中的说明,GPIO的其他模式请看文章《STM32 GPIO详解》。上文说到开漏模式输出1时,端口保持高阻态,这个时候如果端口外上拉电阻,就可以输出电平1。 开漏输出的作用: 1:防止短路,在一些应用中,两个GPIO链接在一起(中间没有串电阻),或者在总线应用中,需要将MCU的多个GPIO连接在一起。如果都设置成推挽输出,当一个GPIO输出1,另一个输出0,那么就短路了,直接凉凉。如下图
如果换成开漏输出,GPIO的高电平是靠上拉电阻的,也就是VCC和GND之间会有个电阻,不会出现短路的问题。这样的电路就安全一些,所以部分总线采用开路输出。 2:线与:开漏输出还能实现线与,减少一个与门,简化电路。这个问题下文讲到。 04开漏输出在IIC的应用 IIC为什么需要开漏输出,除了上文说的到的防止短路,还有一个重要的因素就是线与。 首先我们先说一下线与功能: 线与逻辑,即两个输出端(包括两个以上)直接互连就可以实现“AND”的逻辑功能。在总线传输等实际应用中需要多个门的输出端并联连接使用,而一般TTL门输出端并不能直接并接使用,否则这些门的输出管之间由于低阻抗形成很大的短路电流(灌电流),而烧坏器件。 在硬件上,可用集电极开路门(OC门)或三态门(TS门)来实现。用OC门实现线与,应同时在输出端口加一个上拉电阻。
上面是数电知识,我的个人简单理解是:就是a,b两条线,两端接一块做输出,另两端做输入。如果输入都是高电平,那输出就是高电平,否则输出就是低电平。 那么线与在IIC中的应用是什么呢? 答案是:多主设备抢占总线的仲裁。 在之前IIC读取RTC或IIC读取MPU6050的情况,都是一个主机,一个从机。但IIC设计中可以支持多主机模式,那么就面临一个问题,当多个主机同时启动总线时,如果仲裁的问题。线与逻辑就起到了作用。 假设主设备A需要启动IIC,它需要在SCL高电平时,将SDA由高电平转换为低电平作为启动信号。主设备A在把SDA拉高后,它需要再检查一下SDA的电平。 SDA是高电平,说明主设备A可以占用总线,然后主设备A将SDA拉低,开始通信。 SDA是低电平,说明有人已经捷足先登了,主设备A不能占用总线,结束通信。 如果主设备A拉高SDA时,已经有其他主设备将SDA拉低了。由于1 & 0 = 0 那么主设备A在检查SDA电平时,会发现不是高电平,而是低电平,说明其他主设备抢占总线的时间比它早,设备A只能放弃占用总线。如果是高电平, 则可以占用。 这就是IIC通信开漏输出的原因。上拉电阻的原因就是由于开漏输出的特性,需要上拉电阻在输出1时,提高驱动力。 05最后补充 最后说一下为什么之前使用推挽输出的IIC读取RTC没有问题,这个因为上拉电阻的阻值不同,RTC的上拉电阻即使推挽输出也可以正常拉高拉低电平。这个根据上文讲述的,可以查MCU的datasheet,确认IO的PMOS和NMOS的阻抗,计算一下电压。 还有一个简单粗暴的办法,直接使用示波器看波形也可以发现问题。 声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉 芯片 芯片 +关注关注 449文章 48837浏览量 413639 通信 通信 +关注关注 18文章 5796浏览量 134898 I2C I2C +关注关注 28文章 1406浏览量 121602原文标题:I2C通信中的坑 文章出处:【微信号:strongerHuang,微信公众号:strongerHuang】欢迎添加关注!文章转载请注明出处。 收藏 人收藏扫一扫,分享给好友 复制链接分享 评论发布评论请先 登录 相关推荐 MPU6050休眠后如何配置重力加速度唤醒MPU6050? MPU6050休眠后如何配置重力加速度唤醒MPU6050自己? 发表于 05-07 06:19 MPU6050 dmp库定时查询读取偶尔获取失败的原因? 在玩mpu6050 dmp库的时候遇到了一些问题,dmp设置fifo频率20Hz,每50ms程序中读取一次,但是偶尔会有都不到数据的情况,mpu_read_fifo_stream读取 发表于 04-30 06:37 ADXL345和MPU6050的区别 ADXL345和MPU6050是两种常见的加速度计和陀螺仪传感器,用于测量物体的加速度和旋转速度。它们在设计、性能和应用方面有一些区别。在本文中,我们将对ADXL345和MPU6050的区别进行详细 MCU\mpu6050 通信及电路原理图
SPI\IIC\RS485通信动态图展示,MCU\mpu6050 通信及电路原理图
发表于 10-17 16:36
•5次下载
mpu6050航向角偏移怎么解决?
为什么mpu6050航向角会偏移,在四轴上怎么解决偏移问题
发表于 10-08 06:07
Arduino和MPU6050加速度计和陀螺仪教程
自制云台相机不一定要很笨重,试用MPU6050加速计、陀螺仪传感器与Arduino就可以!同时将解释MPU6050的工作原理以及如何从中读取数据,然后我们将给出两个实际例子。
发表于 09-26 06:14
小熊派Hi3861读取mpu6050数据并在oled显示
基于小熊派相关代码,修改得到的读取mpu6050数据,并在oled显示
发表于 08-14 15:00
•15次下载
小熊派Hi3861获取mpu6050数据在oled屏幕中显示
小熊派Hi3861获取mpu6050数据在oled屏幕中显示
MCU\mpu6050 通信及电路原理图
SPI\IIC\RS485通信动态图展示,MCU\mpu6050 通信及电路原理图
发表于 10-17 16:36
•5次下载
mpu6050航向角偏移怎么解决?
为什么mpu6050航向角会偏移,在四轴上怎么解决偏移问题
发表于 10-08 06:07
Arduino和MPU6050加速度计和陀螺仪教程
自制云台相机不一定要很笨重,试用MPU6050加速计、陀螺仪传感器与Arduino就可以!同时将解释MPU6050的工作原理以及如何从中读取数据,然后我们将给出两个实际例子。
发表于 09-26 06:14
小熊派Hi3861读取mpu6050数据并在oled显示
基于小熊派相关代码,修改得到的读取mpu6050数据,并在oled显示
发表于 08-14 15:00
•15次下载
小熊派Hi3861获取mpu6050数据在oled屏幕中显示
小熊派Hi3861获取mpu6050数据在oled屏幕中显示
 MPU6050使用互补滤波与卡尔曼滤波算法进行姿态解算
MPU6050使用互补滤波与卡尔曼滤波算法进行姿态解算
发表于 08-07 15:46
•3次下载
【Milk-V Duo 开发板免费体验】2. mpu6050驱动添加及测试
读取*/
#define MPU6050_IIC_ADDR0x68 /*MPU6050 IIC 器件地址*/
/* 中断状态寄存器*/
#define
发表于 07-25 22:00
MPU6050使用互补滤波与卡尔曼滤波算法进行姿态解算
MPU6050使用互补滤波与卡尔曼滤波算法进行姿态解算
发表于 08-07 15:46
•3次下载
【Milk-V Duo 开发板免费体验】2. mpu6050驱动添加及测试
读取*/
#define MPU6050_IIC_ADDR0x68 /*MPU6050 IIC 器件地址*/
/* 中断状态寄存器*/
#define
发表于 07-25 22:00
|
【本文地址】