基于ICP算法的三维点云模型配准matlab仿真 |
您所在的位置:网站首页 › mppt算法原理 › 基于ICP算法的三维点云模型配准matlab仿真 |
基于ICP算法的三维点云模型配准matlab仿真
|
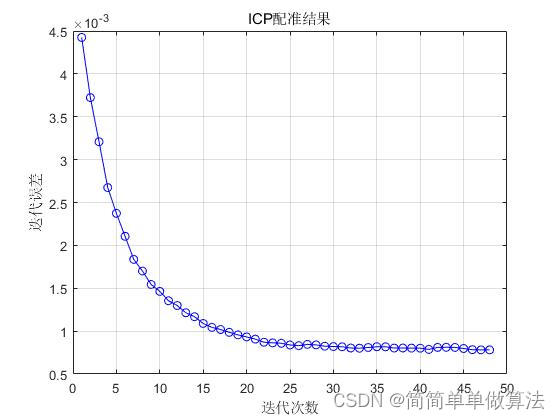
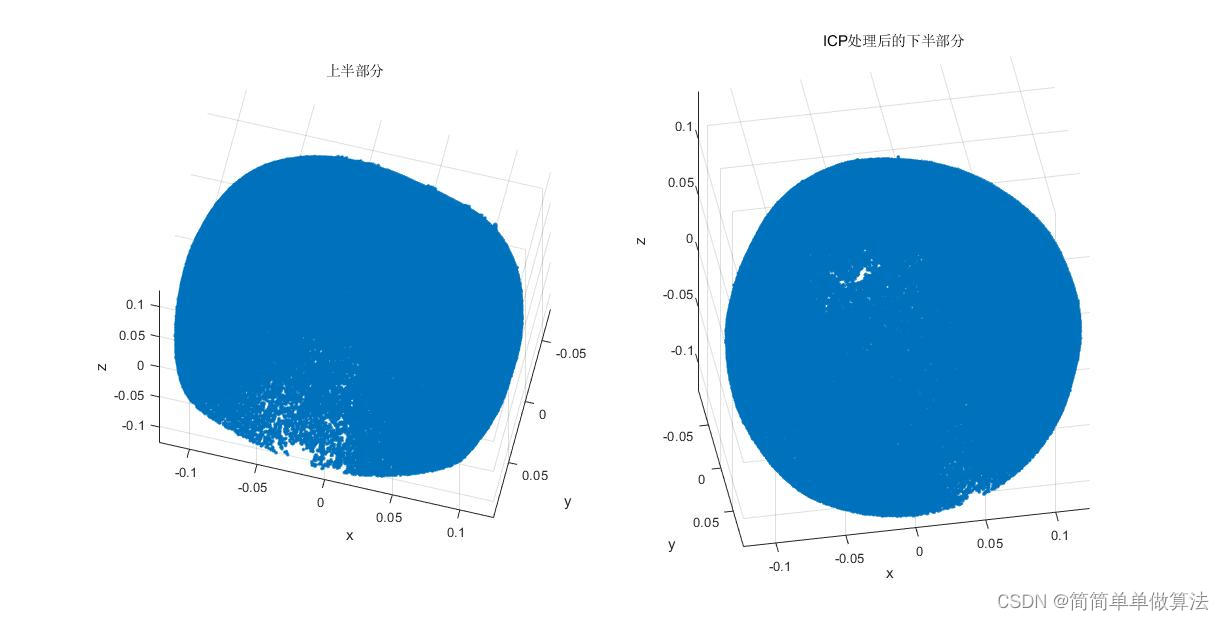
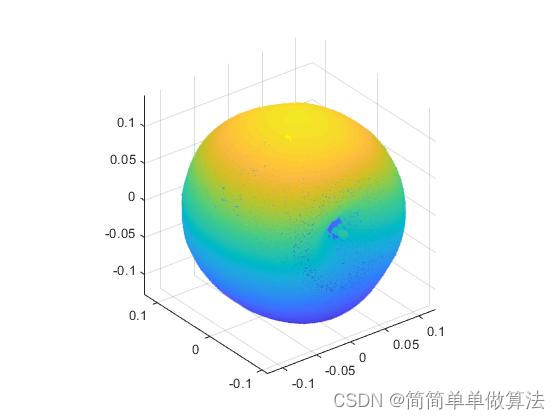
目录 1.算法理论概述 一、引言 二、ICP算法 三、三维点云模型配准 四、ICP算法数学原理 2.部分核心程序 3.算法运行软件版本 4.算法运行效果图预览 5.算法完整程序工程 1.算法理论概述 一、引言三维点云模型配准是计算机视觉和计算机图形学中的一个重要研究方向,可以将多个三维点云模型对齐到同一坐标系中,以实现三维重建、地图制作、机器人导航等应用。ICP(Iterative Closest Point)算法是一种常用的三维点云模型配准算法,具有高效、精确的特点。本文将详细介绍基于ICP算法的三维点云模型配准的实现步骤和数学原理。 二、ICP算法ICP算法是一种基于迭代的三维点云模型配准算法,可以将两个三维点云模型对齐到同一坐标系中。ICP算法的基本思路是:将目标点云模型的每个点与参考点云模型中距离最近的点匹配,然后计算两个点云模型之间的变换矩阵,将目标点云模型变换到参考点云模型的坐标系中。ICP算法可以分为以下几个步骤: 随机采样匹配点 从目标点云模型中随机采样一些点,将它们与参考点云模型中距离最近的点匹配,得到一组初始的匹配点对。 计算变换矩阵 根据匹配点对,可以计算出变换矩阵,将目标点云模型变换到参考点云模型的坐标系中。常用的变换矩阵包括平移矩阵、旋转矩阵、缩放矩阵等。 更新匹配点 将变换后的目标点云模型与参考点云模型重新匹配,得到一组更新后的匹配点对。 判断收敛条件 判断匹配点对的误差是否小于阈值,如果满足收敛条件,则终止迭代;否则返回步骤2,继续迭代计算。 三、三维点云模型配准三维点云模型配准的实现步骤如下: 读取目标点云模型和参考点云模型 从文件或传感器中读取目标点云模型和参考点云模型,并将它们转换为点云数据结构。 数据预处理 对目标点云模型和参考点云模型进行预处理,包括去除离群点、滤波、下采样等操作。预处理可以提高匹配精度和匹配效率。 初始对齐 将目标点云模型和参考点云模型进行初步对齐,可以使用手工标定、IMU(Inertial Measurement Unit)数据等方法。 ICP迭代 使用ICP算法对目标点云模型和参考点云模型进行配准,可以使用ICP算法的不同变体,如点对点ICP、点对平面ICP、高斯混合模型ICP等。 后处理 对配准后的点云模型进行后处理,包括去除离群点、滤波、下采样等操作。后处理可以进一步提高配准精度和模型质量。 四、ICP算法数学原理ICP算法的数学原理比较简单,主要涉及到点云的变换和误差计算。ICP算法的核心是点云的变换,可以使用欧氏变换矩阵(旋转矩阵R和平移向量t)表示点云的变换。假设目标点云模型$P_m$和参考点云模型$P_r$分别包含$n$个点,设$P_m={p_{m1},p_{m2},...,p_{mn}}$和$P_r={p_{r1},p_{r2},...,p_{rn}}$,则点云的变换可以表示为: $$ p_{mi}' = Rp_{mi}+t $$ 其中,$p_{mi}'$是变换后的目标点云模型,$R$是旋转矩阵,$t$是平移向量。 误差计算 ICP算法的另一个核心是误差计算,即如何衡量目标点云模型和参考点云模型之间的差异。常用的误差计算方法是欧氏距离和最小二乘法。假设已经得到一组匹配点对$(p_{mi},p_{ri})$,则可以计算误差矩阵$E$: $$ E = \begin{bmatrix} e_{1} \ e_{2} \ \vdots \ e_{n} \ \end{bmatrix} = \begin{bmatrix} p_{mi}-Rp_{ri}-t \ \end{bmatrix} $$ 其中,$e_i$表示第$i$个匹配点对的误差。ICP算法的目标是最小化误差矩阵$E$的平方和,即最小化以下目标函数: $$ f(R,t) = \sum_{i=1}^{n} | p_{mi}-Rp_{ri}-t |^2 $$ 通过求解目标函数的导数,可以得到最优解的闭式解: $$ R = (P_m - \overline{P_m})(P_r - \overline{P_r})^T \ t = \overline{P_r} - R\overline{P_m} $$ 其中,$\overline{P_m}$和$\overline{P_r}$分别是目标点云模型和参考点云模型的质心。 2.部分核心程序 ................................................................................ ALL_Normal = [Normal1_new;Normal2_new];%拼接后的点云法向量 %绘制迭代误差图和点云配准结果图 figure; plot(Derr,'b-o'); xlabel('迭代次数'); ylabel('迭代误差'); grid on title('ICP配准结果'); figure; subplot(121); plot3(target_(:,1),target_(:,2),target_(:,3),'.'); grid on axis equal xlabel('x'); ylabel('y'); zlabel('z'); title('上半部分'); subplot(122); plot3(Reallignedsource(:,1),Reallignedsource(:,2),Reallignedsource(:,3),'.'); grid on axis equal xlabel('x'); ylabel('y'); zlabel('z'); title('ICP处理后的下半部分'); %绘制拼接后的点云图像并保存数据 figure; plot3(ALL(:,1),ALL(:,2),ALL(:,3),'.'); grid on axis equal xlabel('x'); ylabel('y'); zlabel('z'); %保存数据 Tri = pointCloud(ALL);%将拼接后的点云数据保存为PLY格式 Tri.Normal = ALL_Normal; % Tri = pointCloud; % Tri.Location = ALL; % Tri.Color = []; % Tri.Normal = ALL_Normal; % Tri.Intensity= []; % Tri.Count = length(ALL); % Tri.XLimits = [min(ALL(:,1)) max(ALL(:,1))]; % Tri.YLimits = [min(ALL(:,2)) max(ALL(:,2))]; % Tri.ZLimits = [min(ALL(:,3)) max(ALL(:,3))]; pcwrite(Tri,'apple2.ply'); %在点云图像中显示拼接后的点云 pcshow(Tri); 19_031m 3.算法运行软件版本MATLAB2017B 4.算法运行效果图预览
OOOOO OOO O |
【本文地址】