锁相环PLL原理及matlab代码 |
您所在的位置:网站首页 › matlab锁相环模块中的sin › 锁相环PLL原理及matlab代码 |
锁相环PLL原理及matlab代码
|
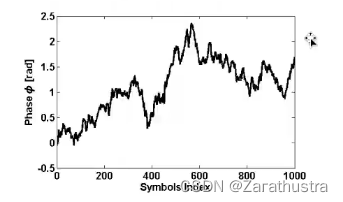
补偿相干系统中的激光器相位噪声。 根据Wiener process的性质,离得越近的符号相位噪声在概率统计上越相似,因此,可以用上一个符号估计得到的相位当做当前这个符号的初始相位,再通过判决来估计当前符号的准确相位,这就是锁相环PLL的基本原理。
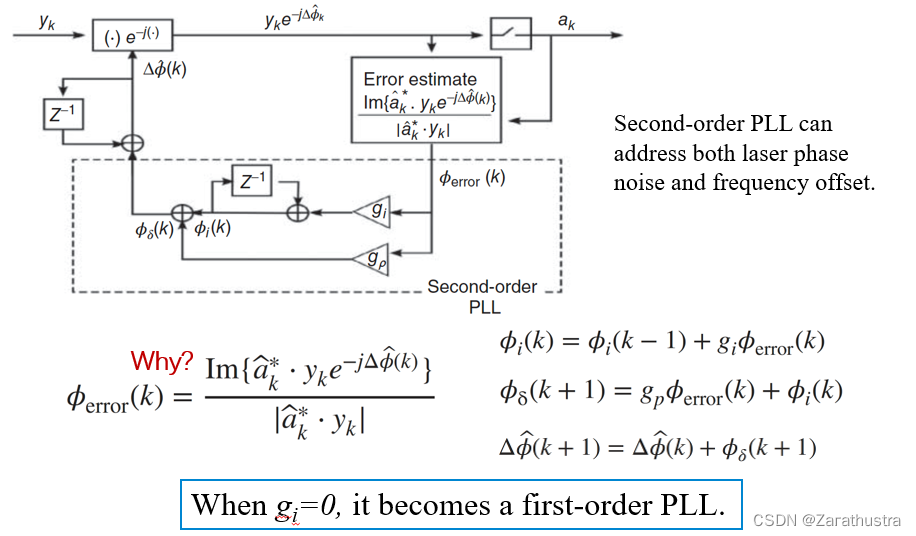
gi和gp代表低通滤波器的带宽,gp小,可以更好抑制噪声,gp大,可以更好追踪相位,需要综合考虑 yk是接收的第k个符号, 对于初始估计频偏,有一些降低硬件计算量的操作,主要是利用偏差相位角非常小,使用泰勒级数展开 对于初始相位可以通过导频估计,然后粗补
matlab代码 %消除初始相位的影响 PilotLen=length(PilotSym); ang=angle(sum(rxSym(1:PilotLen)./PilotSym)); rxSym=rxSym.*exp(-1j*ang);锁相环 %CPR symLen=length(rxSym); deRxSym=rxSym; CPRrxSym=rxSym; error=zeros(1,symLen); phase=error; for i=2:symLen deRxSym(1,i-1)=hard_decision(CPRrxSym(1,i-1)); error(1,i-1)=imag(CPRrxSym(1,i-1).*conj(deRxSym(1,i-1))); phase(1,i)=g*error(1,i-1)+phase(1,i-1); CPRrxSym(1,i)=rxSym(1,i).*exp(-1j*phase(1,i)); end |
【本文地址】
今日新闻 |
推荐新闻 |